光栅型高速扫描近红外光谱仪的研发
2018-06-07 03:08
分析仪器 2018年3期
(1.江苏大学机械工程学院,镇江,212013;2.上海棱光技术有限公司,镇江,212013;3.江苏大学食品工程学院,镇江,212013)
1 引言
近红外光谱分析技术是一种以分子振动对近红外光的吸收特性为基础的快速检测技术。与传统测量技术相比,近红外光谱分析技术具有速度快、成本低、无损、无污染等优势,被广泛的应用于食品安全、石油化工、生物医药、农林牧业等领域[1]。
常见的近红外光谱仪可分为滤光片式、光栅扫描色散式、傅里叶变换式(Fourier Transform Spectrometer,FT)、声光可调滤光器型(Acousto-optic Tunable Filter,AOTF)以及基于微机电(MEMS)技术等多种工作方式。目前国内市场占有率较高的近红外光谱仪主要是傅里叶变换式光谱仪和光栅扫描式光谱仪。傅立叶变换型光谱仪具有波长扫描速度快、精度高、分辨率较好的优点,但其核心部件傅立叶干涉仪体积较大,成本高。光栅扫描型光谱仪具有全谱扫描、分辨率较高,结构简单、造价低等优点,但由于常规采用步进电机加丝杆的结构,造成了其光谱扫描速度低的缺点。针对上述问题,本研究设计的光栅扫描型光谱仪,采用齿轮传动机构,通过机械细分与步进电机的电细分相结合,有效提高了波长扫描速度与波长控制精度,并设计完成了光学系统和光谱仪控制系统,为光栅型近红外光谱仪的进一步开发提供依据,促进其智能化发展。
2 光谱仪总体设计
2.1 工作原理
光谱仪是通过光栅衍射作用将复色光分为不同波长单色光的分光仪器。单色光与样品池中的样品相互作用,经过积分球均匀,再由探测器检测。通过计算待测物品样品和参比的反射光强比值,得到待测物质的吸光度值。
根据光栅衍射理论,平面反射光栅的光栅方程为[2]:
mλ=dsinα-sinβ,m=0,1,2,…
(1)
式中:d为光栅常数;α为入射光与光栅法线N的夹角;β为衍射光与光栅法线N的夹角;λ为衍射光波长;m为光栅衍射光谱级数,当m= 0时为零级光,包含所有波长,为复合光。一般选用能量较强的一级光(m= 1)作为出射光。
式(1)经过三角函数变换,可得:
(2)
由于光谱仪入射狭缝A和出射狭缝B固定,即光栅面的入射光线和输出衍射光线的夹角为固定值,设夹角为2δ。如图1所示,当光栅位于零级谱位置时,入射角α等于出射角β,光栅法线与入射光线和衍射光线的夹角平分线重合。
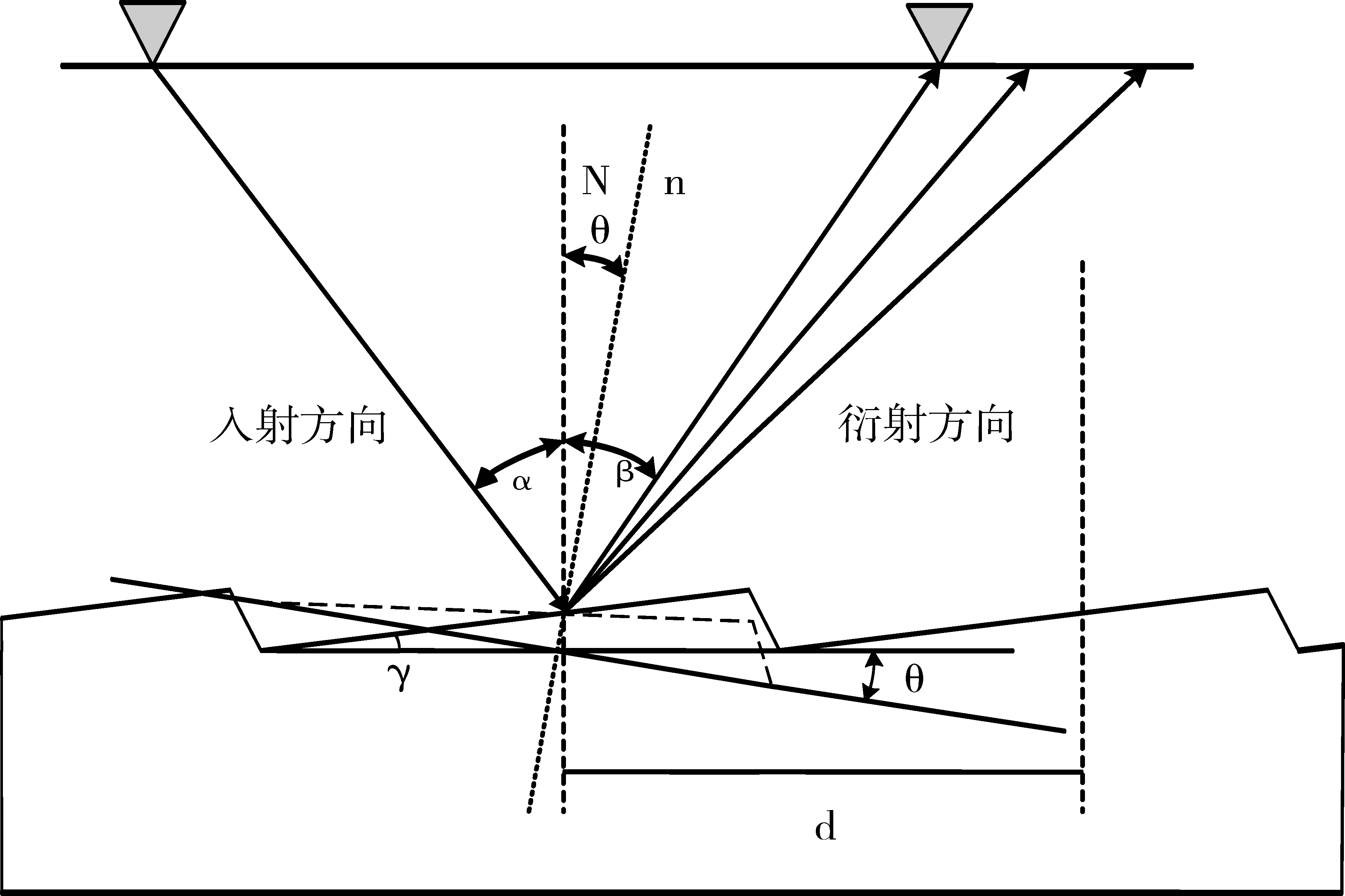
图1 闪耀反射光栅分光原理图
当光栅相对于零级光谱位置转动角度θ,则有:

(3)
将式(3)带入式(2)并进行换算,可推得光栅波长与相对于零级光谱位置转动角度的关系式:
λ=2dsinθcosδ
(4)
步进电机的步距角为j,步进电机驱动器的细分比为k1,齿轮的传动比为k2,光栅由初始位置旋转至零级光位置所走的步数为S0,旋转至某一波长单色光所走的步数为S,则步数S与波长λ的函数关系为:
(5)
其中,步距角j=0.9°,k1=128,k2=12。由于生产过程中存在一定的加工、安装等误差等,导致不能使用机械设计时确定的参数来计算,需要进行重新标定。系统通过测定高压汞灯特征谱线,并根据其特征波长对应实际脉冲数,采用正弦函数最小二乘拟合[3],得到实际参数。然后根据实际系数重新完成波长标定。
2.2 仪器总体结构
光谱仪主要由分光系统、信号处理系统,控制系统及上位机组成。整体结构如图2所示。

图2 仪器总体结构图
分光系统包括光源、滤色片,由步进电机及齿轮驱动的平面反射型衍射光栅(单色器);信号处理系统包括探测器制冷电路、信号调制电路和A/D转换电路;控制系统采用STM32作为主控芯片,实现电机驱动模块、信号采集模块、USB接口模块的控制。上位机系统对数据进行处理、显示和保存。
2.3 硬件设计
(1)分光系统
采用卤钨灯作为光源,安装滤光片消除多级重叠谱线,采用Czerny-Turner光路结构,消慧差设计,结构紧凑,可有效抑制杂散光。工作原理图如图3所示。

图3 分光系统原理图
光源发出的复合光,经聚光镜汇聚到入射狭缝处,通过滤光片选择波段后,经过准直镜使入射光形成平行光射向光栅。光栅将复合光分成连续波长的单色光,单色光经成像镜的反射后汇聚在不同的位置。步进电机驱动齿轮带动光栅转动,各路出射光的像点水平移动,相应波长的光依次从出射狭缝中射出,进入样品池中。由此只需控制步进电机转动的角度即可实现波长的自动扫描[4]。
齿轮扫描结构如图4所示。步进电机驱动主动小齿轮,带动扇形齿轮驱动光栅轴套转动,从而转动光栅实现波长扫描,完成近红外复合光的分光过程。平台底板上固定设置有定位光耦,与扇形齿轮上的定位杆干涉来确定初始位置。为了提高波长的控制精度和扫描速度,采用机械细分与电细分相结合。设计减速齿轮的传动比12∶1,步进电机驱动器细分比为128∶1,可达到0.00078125°的理论控制精度。

图4 齿轮光栅扫描结构示意图
(2)信号处理系统
信号处理系统主要由探测器制冷、信号调制、A/D采集等3个部分组成。照射到探测器上的光信号首先由光电转换模块转换为电信号,再由信号调理模块进行放大处理后,模数转换器进行量化采集,生成处理器可处理的数字信号。
光电转换模块选用铟镓砷PIN光电二极管G12183-130K,其光谱响应范围为900 ~ 2570nm的近红外波段,峰值灵敏度波长为2300nm,暗电流为90μA。
如图5所示,选择零伏偏置电路作为电流-电压转换电路。光导模式下,光电二极管具有反向偏置电压,可以实现高速测量,但要牺牲一定的线性。同时由于存在偏置电压,即使在没有光照的情况下,仍然有一个非常小的暗电流,该电流产生的散粒噪声会成为附加的噪声源。光伏模式下,光电二极管无外加偏置电压,信号的线性度比较好,能够进行精确测量,并且在无偏置电压条件下,无暗电流存在。探测器输出的光电六量级仅为几十nA,应尽量减少电路本身引进的噪声。

图5 光伏模式
在信号调理模块中,由于探测器生成的电信号非常微弱,很容易就淹没在噪声背景中,因此需要信号放大电路实现信号放大[5]。信号放大电路如图 6所示,利用高增益的运算放大器和极高反馈电阻构成闭环放大电路,光电二极管的等效输入电阻和暗电流接近于零,利用光电二极管的短路电流作为其输出电流进行电流-电压转换处理得到电压信号,同时可以获得良好的光电响应特性和较高的信噪比。并采用相同的运算放大器构成电压跟随器,作为缓冲电路实现上下级电路的阻抗匹配。为了抑制共模噪声,降低二次谐波失真,提高信噪比,采用芯片A/D8476实现差动放大。

图6 I-V转换及前置放大电路
A/D7175芯片是一款24bit高精度模数转换芯片,支持两路全差分或4路单端输入,输出速率范围为5 samples/s ~ 250 ksamples/s,接口兼容SPI协议,与STM32传输数据。根据A/D7175芯片手册,设计了模数转换电路。如图7所示,输入信号经电压跟随器传送给模数转换芯片A/D7175,A/D的采样时钟由控制信号由STM32定时计数器产生。

图7 A/D转换电路图
近红外探测器要求工作在恒定的温度条件下,以达到较高的测量精度与稳定性[6]。设计基于制冷控制芯片MAX1969的探测器制冷电路,如图8所示。探测器中热敏电阻的采样电压与通过滑动变阻设定的温度电压在减法器中比较后进行PID调节,最后以电压的形式输出到MAX1969的CTL1引脚上,使其输出变化的电流控制探测器内部TEC进行制冷。

图8 制冷控制电路图
(3)STM32控制系统
控制系统主要包括电源模块、电机复位模块、步进电机控制模块、数据采集模块和USB接口模块。考虑到主控电路主要实现数据的采集和传输,选用了STM32f429芯片作为系统的微处理器。它采用了先进的ARM Cortex-m4内核,不仅运行速度高、处理能力强,具有 USB2.0全速接口,简化了硬件电路的设计,降低了系统成本。
2.4 软件设计
软件部分由上位机软件部分和下位机软件部分构成,上位机软件主要完成对信号的分析、显示以及与下位机的通讯。下位机软件负责接收上位机软件的配置完成对系统的自检、调零、扫描控制、电机状态检测、数据采集与处理等工作。
基于STM32 F429的控制系统的软件部分在keil开发环境下,采用C语言编写。为了方便系统的调试和修改,软件程序的设计方面采用了功能程序模块化的设计思路。主要的功能包括系统初始化模块、数据采集模块、数据处理模块和数据通讯模块。系统的主程序就是循环调用这些子模块来实现对软硬件资源的有机管理。下位机软件主要负责接收上位机的配置指令,完成系统的自检、调零、扫描控制、数据采集等工作。其工作流程:STM32F429微处理器接收上位机的配置指令后,首先对仪器进行预热处理,使光源工作温度稳定在设定值,对探测器进行制冷调节。根据上位机的光谱扫描指令,控制步进电机转速与扫描间隔,对样品池进行光谱扫描。探测器检测的模拟信号经高速ADC由主控制器采集,经过与上位机的通信接口传输至上位机进行数据处理。如图9所示下位机软流程图。上位机控制系统负责实现人机界面交换、系统参数设置、光谱数据处理、显示及各种功能测试,并把光谱数据存为标准格式,以便于分析软件读取和处理。

图9 下位机软件流程图
上位机软件用C#编写,软件框图如图10所示。

图10 上位机光谱仪控制软件功能框图
其中,波长校正模块,实现对近红外光谱仪波长校正系数文件进行读取与计算,得到各点对应的波长值;仪器控制模块,实现对近红外光谱仪的控制、设置扫描参数等;测量控制模块,用于采集仪器的暗电流信号、参比信号以及将采集到的样品光谱信号值转换为吸光度的形式;数据存储模块,实现将采集到的光谱数据以纯文本文件(csv)格式保存,文件中包含了光谱仪波长变量和样品吸光度值,文件头部添加光谱采集信息,如波长变量个数、有无样品化学值、数据存储时间、暗电流信号以及参比数据等,方便使用者导入NIRSA化学计量学软件进行模型建立。谱图显示模块,实现显示采集完成的光谱数据,并在完成全部样品数据采集后进行谱图显示,用来分析各光谱数据间的差异[7]。
3 光谱仪性能测试分析
3.1 基线(100%T线)稳定性


图11 光谱100%T线标准偏差图
3.2 波长准确性
光谱仪的波长准确性是指仪器测定标准物质某一谱峰的波长与该谱峰标定波长之差。通过3次测试高压汞灯和几种窄带滤波片的特征光谱值,比较几种特征峰的平均值与理论波长的相对误差,结果如表1所示,分析可知该仪器的波长准确性基本达到了理论波长准确性。

表1 高压汞灯定标波长准确性测试
3.3 分辨率
仪器分辨率为测量光源谱峰半宽度值。测量高压汞灯特征谱线,如图12所示特征谱清晰,半高宽均小于等于6nm,达到近红外光谱仪的一般要求。其中1357nm和1367nm两根相隔10nm的谱线可清晰分辨开。按照光谱仪分辨率的检定规程,足以说明研制的近红外光谱仪分辨率达到了小于10nm的水平。

图12 样机测得的高压汞灯谱图
3.4 扫描速度
在确保数据采集准确度和仪器良好重复性的情况下,波长扫描速度优于85nm/s,扫描一遍全光谱并输出光谱图谱的总时间< 8 s,相较于现有国内产品的近红外光谱仪扫描全谱时间一般在30~120 s的近红外光谱速度有明显的提升。
4 结论
提出一种采用齿轮驱动光栅的波长扫描方案,采用STM32微处理器,实现了步进电机驱动控制、A/D转换控制,软硬件通讯等功能,设计了光电转换电路、信号调理电路和探测器制冷控制电路;在上位机软件中完成了光谱数据的采集、处理以及图形化显示;并对样机进行了性能测试,选用面粉进行了定量分析试验。初步测试结果试验表明:该仪器扫描范围为1000nm~2500nm,扫描速度达到240nm/s,光谱分辨率6nm,波长准确性,基线稳定性0.0005 A/h。该仪器测量速度快且测量精度较高,操作简便,成本优势突出。
[1] 徐广通,袁洪福,陆婉珍.现代近红外光谱技术及应用进展[J].光谱学与光谱分析,2000,02:134-142.
[2] 杨增鹏,唐玉国,巴音贺希格,等.小型高光谱分辨率光栅单色仪的研制[J].光谱学与光谱分析,2016,36(1):273-278.
[3] 乔道鄂,谷玉海,徐小力.自动光栅单色仪波长标定技术[J].仪表技术与传感器,2009(3):118-120.
[4] 黄晋卿.光谱光栅仪中高精度快速波长扫描方法的研究[D].上海交通大学,2010.
[5] 严福兴.极微弱光电流测量电路的设计[J].武汉理工大学学报(信息与管理工程版),2006,28(11):114-116.
[6] 董长哲,王宇,李明,等.InGaAs探测器热电制冷方法研究[J].航天返回与遥感,2011,32(4):53-58.
[7] 田高友,褚小立,袁洪福,等.近红外光谱仪器主要技术指标与评价方法概述[J].现代科学仪器,2005,(4): 17-20.
[8] Norris K N,Williams P C.Optimization of Mathematical Treatments of Raw Near-Infrared Sinal in the Measurement of Protein in Hard Red Spring Wheat.I.Influence of Partical Size[J].Cereal Chemistry,1984,61(2): 158-165.
猜你喜欢
测控技术(2018年11期)2018-12-07
中国管理信息化(2017年5期)2017-06-22
科技与创新(2016年24期)2017-03-30
现代传输(2016年3期)2017-01-15
光学精密工程(2016年6期)2016-11-07
光学精密工程(2016年5期)2016-11-07
高师理科学刊(2016年8期)2016-06-15
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
军民两用技术与产品(2015年15期)2015-03-09
安徽工业大学学报(自然科学版)(2014年4期)2014-07-11