磁悬浮助推发射系统悬浮导向特性分析
2018-06-05 08:12杨文将宋东彬
兵器装备工程学报 2018年5期
李 杨,杨文将, 叶 茂, 宋东彬, 刘 宇,2
(1.北京航空航天大学 宇航学院, 北京 100191; 2.中国航天科工六院, 呼和浩特 010010)
低成本可重复使用单级入轨航天运载器已成为世界航天发射领域迫切追求的目标[1],近年来英国基于组合式发动机技术的“云霄塔”计划[2],为水平起降新型天地往返运输系统又开辟了新思路。其中,服务于地面高速起飞需求的磁悬浮助推发射,作为一种重要的地面助推发射方式,受到了越来越多国家的关注。
目前,以美国、俄罗斯为代表的多个国家正在积极开展将磁悬浮技术应用于航天发射及技术研究。其中以美国为主,NASA在20世纪90年代提出了一个较为细致的磁悬浮助推发射方案—Maglifter方案,重点描述了磁悬浮助推发射系统的基本组成、发射参数和助推发射实施方案,建立了多个实验系统并且开展了相应的测试工作[3-4]。进入21世纪,美国霍洛曼火箭橇实验基地进行了多次磁悬浮火箭橇推进实验。2014年,把磁悬浮火箭橇的地面运行速度提高到了1.0Ma,向NASA展示了亚声速条件下磁悬浮助推发射水平起飞运载器的可能性。不管是NASA的Maglifter方案还是霍罗曼基地的火箭橇试验,磁悬浮系统均采用了超导电动磁悬浮结构[5](EDS),这种悬浮结构具有悬浮气隙大,对路面平整度要求低,抗地震性能好,速度更快(还能进一步提速)等特点。同时日本的MLU型悬浮列车也采用的这种系统,自1972年研制成功后进行了多次试验研究和型号改进,2015年4月21日,日本东海铁路公司宣布,公司最新型L0系高速磁浮列车,在山梨磁浮实验铁路载人行驶中,创下时速603 km的世界最高速度纪录。
本文首先阐述了航天磁悬浮助推发射系统中超导电动磁悬浮系统,利用动态电路理论对悬浮导向系统建立了数学模型,运用计算机仿真对系统的悬浮导向特性进行探究。并且在此基础上结合航天运载器发射参数,设计其磁悬浮助推发射悬浮导向系统方案。
1 系统概述
1.1 超导电动磁悬浮系统(EDS)
EDS系统主要由位于承载滑橇上的超导线圈和安放在导轨两侧的“8”字形零磁通线圈构成[6],如图 1所示。滑橇由直线同步电机推进产生速度时,超导线圈与导轨侧壁上的悬浮线圈相交链的磁通发生变化,使悬浮线圈内产生电流与超导线圈发生作用,产生斥力,也就是悬浮力,并且可以实现较大的悬浮气隙(10~15 cm)。
为了实现较大的浮阻比和悬浮刚度,导轨上线圈采用零磁通法,也就是“8”字形线圈法[6]。日本的超导磁悬浮列车使用的是交叉连接的零磁通线圈,和车载超导线圈相互作用提供悬浮力和导向力[7],时速可达500 km/h以上,悬浮高度可达10 cm以上。对于线性度较好航天磁悬浮助推发射导轨,无交叉的零磁通线圈连接方式可以满足导向力的需求,并且结构更加简单,无需复杂的控制系统。
EDS系统高速运行情况下浮阻比高、悬浮刚度大、悬浮气隙大,无交叉连接的“8”字形零磁通线圈结构简单,整个系统可以实现良好的自控制。结合EDS系统的特点,无交叉连接的EDS系统适用于航天磁悬浮助推发射领域,美国霍洛曼空军基地的火箭橇试验系统中助推系统悬浮导向结构方案的选择也是出于这种考虑。
1.2 分析方法
磁浮系统中电磁力计算的特点:
1) 计算比较复杂。一个磁浮系统有多个自由度,同时包含空间和时间;
2) 橇载磁体运行时的迟滞效应和磁体分布不连续性导致的振动对车载系统影响很大;
3) 电磁力的动态特性非常重要。悬浮系统在噪声、振动和热阻方面对系统运行的影响很大。
动态电路理论是研究磁悬浮输运系统较常用的方法,可以兼顾系统运动的迟滞效应和边界效应。本文利用动态电路理论对超导线圈和“8”字形线圈构成的悬浮导向系统进行分析,运用时域分析方法建立数学模型[8],仿真计算分析了典型情况下参数变化的特性。结合航天运载器发射参数,设计了一个磁浮助推发射系统中悬浮导向系统的初步方案。
2 系统计算数学模型
2.1 系统一般数学模型
将系统能量、电、力以及其他值用它们的等效电路参数给出,一个磁浮系统可表示为一个动态电路分析模型。这些电路参数是时间和空间的函数,因此,一个磁浮系统的电流变化过程和力学分析即可通过分析这个动态电路模型的时空关系给出[14-15]。
如图2所示,一个磁浮系统由m个车载超导线圈(SCM)与n个地面线圈相互作用,产生悬浮力、导向力和磁阻力[8]。以m+n阶列阵[i]和[e]表示车载超导线圈组和地面线圈组各自的电流和电压,(m+n)×(m+n)阶方阵[L]表示各线圈的自感和相互间的互感,m+n阶对角阵[R]表示各超导线圈和地面线圈电阻。
由基尔霍夫电压定律可写出系统的矩阵形式电压方程:
(1)
磁浮运载器具有三个方向的运动,将上式右侧第二项在三个方向上分解并且在左右两侧同时乘以电流,可以得到系统功率P的时间函数方程:
(2)
其中:Gx表示x方向上电感的变化率:[Gx]=∂[L]/∂x
式(2)表示了系统中的能量关系,方程左边是固定电源和车载电池上提供的能量,右边第一项表示系统的耗散能量,第二项表示系统所储存磁场能量对时间的变化率,最后三项代表运载器在空间三个方向的运动对应的机械能。
运载器在某个方向的受力与这个方向上运动速度的乘积即为功率P的机械能部分,可知(2)式的后三项分别与vx、vy、vz的比值即为fx、fy、fz:
(3)
(4)
(5)
其中:fx、fy、fz分别为磁阻力,悬浮力和导向力。
而整个磁浮系统则由多个线圈构成,每个线圈有独立的电压、电流、电感等参数。在研究这种复杂的动态电路模型时,常用的方法是对整个系统中的参数改写成矩阵形式。之后进行矩阵变换,将承载滑橇超导线圈和地面“8”字型线圈的参数矩阵分割成行或列,组成子矩阵。
分别将电流、电压、电阻和电感用各自的子矩阵形式表示,并且定义变换矩阵[T]:
(6)
下标v和g分别代表车载线圈和地面线圈。其中Tv和Tg分别是承载滑橇超导线圈和地面线圈的变换矩阵,它们的差别由线圈的连接方式决定。将变换结果看作一新系统,则可求得新的系统中电流、电压、电阻以及电感的变换矩阵。这些参数的变换矩阵构成新的微分方程,即可得到描述动态电路模型的矩阵微分方程,求解系统各部分电路参数。
2.2 基本动态单元模型
系统的典型基本单元为一个超导磁体(SCM)以速度v掠过一个8字形线圈[9],如图3所示。磁浮列车上的超导线圈为跑道形结构,基于工程分析的合理性,将其简化为一矩形线圈:
如图3所示基本单元的理想化物理模型中,8字形线圈是两个矩形线圈反向连接。当该单元处于平衡位置时,8字形线圈的上下环中所交链的磁通互相抵消,因而在线圈中无感应电流产生,这也是8字形线圈称为零磁通线圈的原因。在这个基本单元动态电路模型中运用场路结合的分析方法,构造单元的等效电路图[10]。再从等效电路图出发,构建描述基本单元动态特性的微分方程:
(7)
由微分方程解出8字形线圈中的电流i后,即可求出运动的超导线圈和8字形线圈间的相互作用力:
(8)
(9)
(10)
2.3 多线圈系统模型
将动态电路的方法应用于无交叉式8字形零磁通系统。考虑m个超导线圈与n个地面零磁通线圈作用,其中n个零磁通线圈构成2n个矩形线圈,假定超导线圈中的电流恒定,则可写出2n个矩形线圈系统的矩阵形式电压方程式。因为上线圈中电流与下线圈中相等,系统仅含有n个未知电流,对参数矩阵进行等效变换,地面线圈的变换矩阵Tg由电流关系ij=-in+j(j=1,…,n)决定,而超导线圈组的变换矩阵Tv是一个单位矩阵,将矩阵表示的参数代入式(7),可得到零磁通线圈系统变换后的矩阵形式电压方程组:
(11)
由上式可以得到推进力fx、悬浮力fy、导向力fz:
(12)
(13)
(14)
3 Matlab仿真计算
利用Matlab编程,描绘模型中动态参数的仿真图形,研究系统的运行特性。
3.1 基本单元动态模型仿真结果
参照日本MLX01型超导磁浮列车的技术参数[12-13],用于仿真的有关参数值如表1。
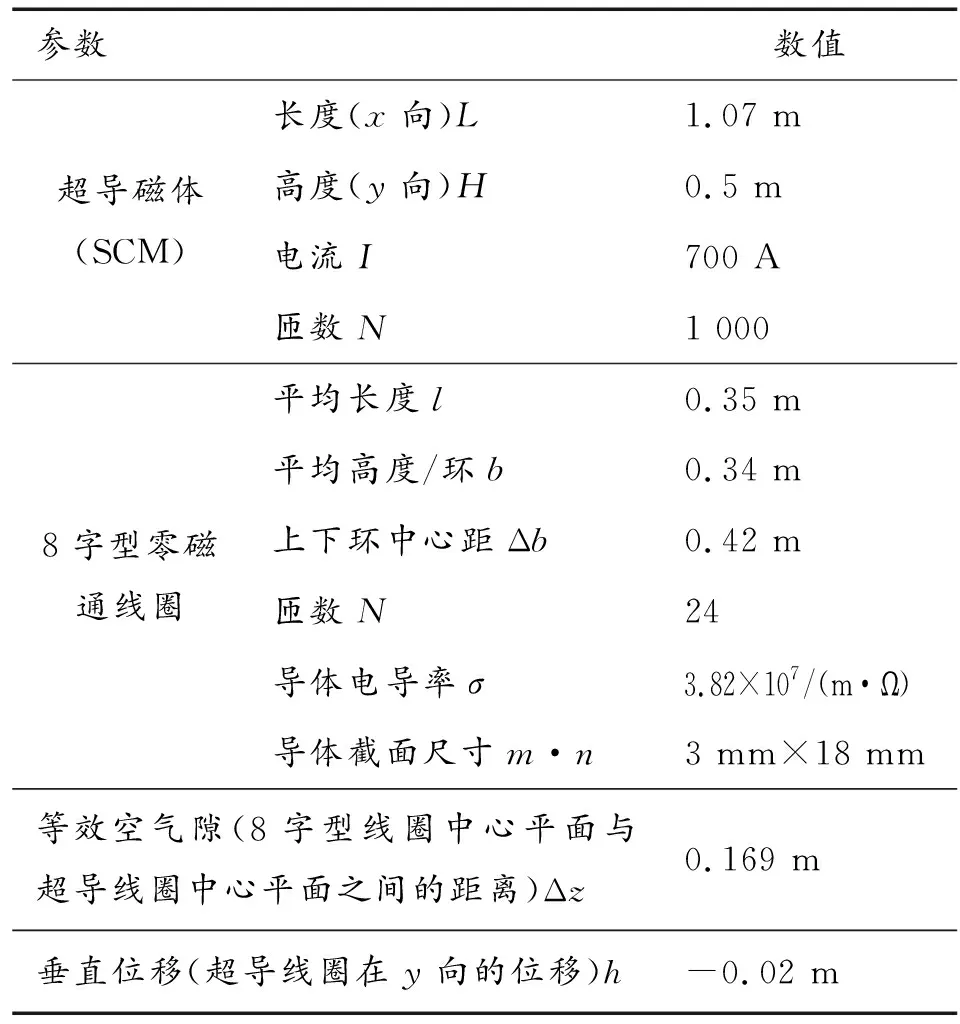
表1 仿真技术参数
图4为单个超导线圈掠过单个8字形零磁通线圈时互感的变化曲线。
可以看出超导线圈在接近8字形线圈时互感迅速增大,超导线圈掠过零磁通线圈后互感迅速降低到0。
分别取vx=5 m/s、28 m/s和139 m/s, 求解三种情况下i的数值解,仿真图形如图5。
图6为不同速度下悬浮力变化曲线,由图6可见,在线圈速度比较小的情况下,靠近8字形线圈的时候产生正向感应电流,产生一个阻碍超导磁体接近“8”字型线圈的力;当远离8字形线圈的时候,会产生一个拖曳超导磁体的力。然而随着速度的增加,异向感应电流的产生会逐渐减弱,当运行速度达到139 m/s的时候,这个异向的感应电流会消失,产生单向的悬浮力。
图7为不同速度下导向力变化曲线,由图7可看出vx=139 m/s时导向力数值高达10 000 N以上,三条曲线比较后也可看出速度增大后曲线平稳恒为正值,这也就为助推滑橇运行提供了很好的侧向稳定性,这也是8字形线圈的特点之一。在高速的磁浮助推发射中,8字形线圈结构也更可发挥其在高速下侧向安全稳定的作用。
图8所示为不同速度下悬浮体受到的磁阻力,可见在相同速度下磁阻力的大小远小于悬浮力和导向力的大小,体现了系统良好的浮阻比,这对系统的平稳运行至关重要。
3.2 多个超导线圈掠过8字形线圈组时运动特性
在忽略车体垂直速度vy和侧向速度vz的情况下得到的系统微分方程如下:
(15)
解微分方程可求得i,电磁力可表示为:
(16)
(17)
(18)
参考MLX01型超导磁浮列车的技术参数,用于仿真的有关参数值如表2。
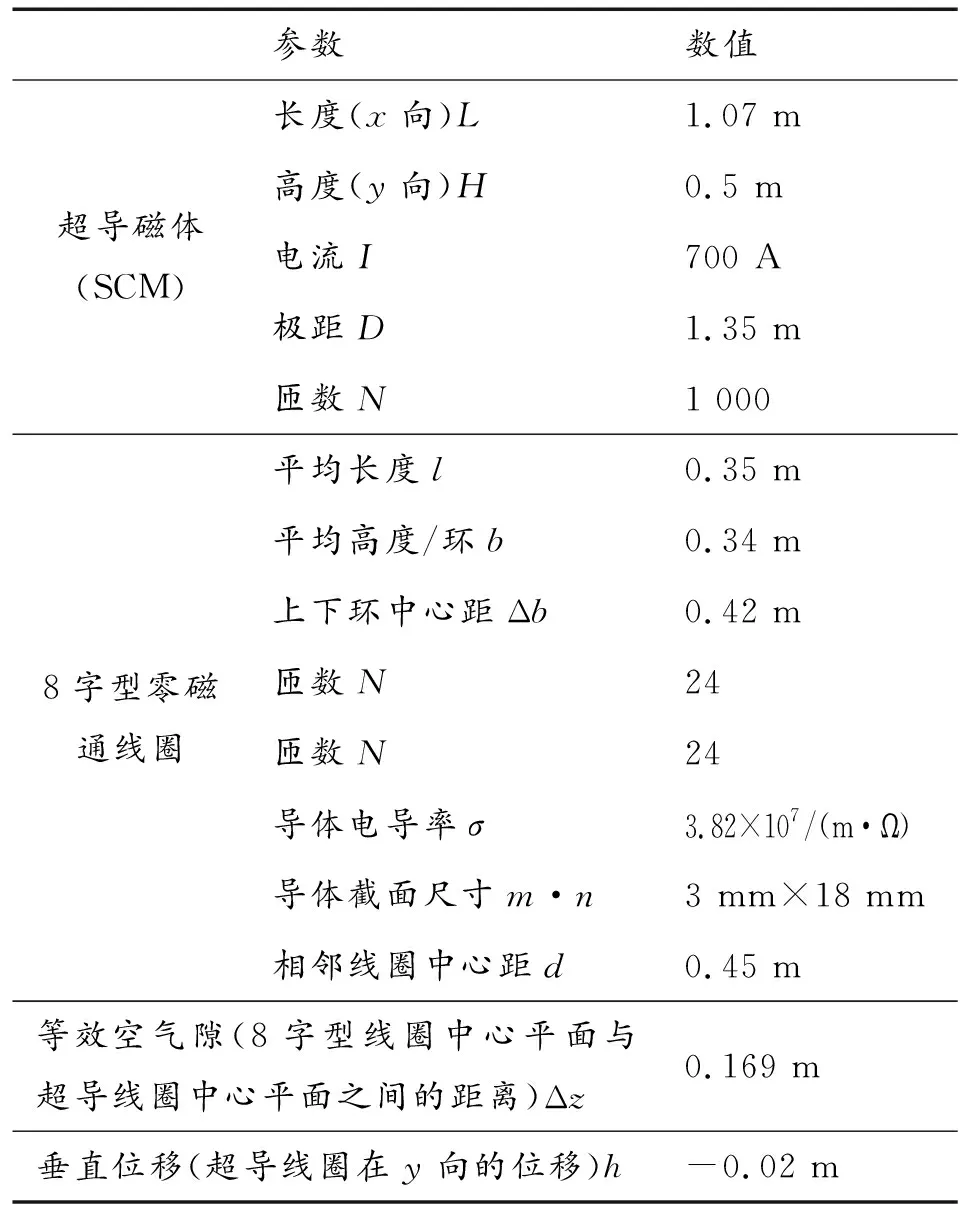
表2 仿真技术参数
图9、图10为单个及多个超导线圈掠过8字型线圈组时的计算结果:
由图10可见,当结构的垂直位移h=0.04 m时,悬浮力高达5.3×104N,与h=0.02 m相比可知垂直位移h对悬浮力的大小影响很大,表明结构具有良好的悬浮刚度。同时车体因所受悬浮力与重力平衡,故其稳定在一定的垂直位移上,这种垂直位移增大悬浮力迅速上升的特性也是8字形线圈的优点之一,这使得助推滑橇运行时,磁浮系统总能够提供足够的悬浮力使橇体达到无接触运行。
图11展示的是多个超导线圈匀速运行时,两侧导轨上“8”字形线圈排列极距对悬浮力波动情况的影响。在线圈极距为8 cm到14 cm之间的时候,悬浮力随着极距的增大而减小,而悬浮力的波动会呈现先减小后增大的趋势,极距p=10 cm附近的时候,悬浮力在最小范围内波动。而波动的频率则是超导线圈线圈极距和超导线圈运行速度的比值。
4 磁浮助推发射方案初步分析
对于磁浮助推发射的特点以及对悬浮导向系统的分析,探究磁浮助推发射的具体方案,航天发射的主要特点如下:
1) 载重量十分大,从100 t到600 t以上不等;
2) 助推分离速度要求高,约270 m/s左右(0.8Ma,972 km/h);
3) 推进力非常大,加速度在2g左右;
4) 能量要求非常高,需要足够的能量供给系统。
根据一个小型运载器的发射要求,初步确定发射总质量为200 t(140 t运载器和60 t的支撑滑橇),分离速度255 m/s(0.65Ma),支撑滑橇长度40 m左右,根据此要求确定悬浮导向系统的参数。
对于航天磁悬浮助推发射系统来说,系统的高线性度对导向力的水平和调整能力的需求都比较低,所以选用了无交叉连接的8字型线圈的连接结构。为了适应航天磁悬浮助推发射的需求,对具体的参数进行了适当的调整:
1) 减小8字形线圈的几何尺寸和截面尺寸,增加线圈的匝数;
2) 增大超导线圈的几何尺寸,增加超导线圈的匝数;
3) 增大垂直位移并且减小等效空气隙。图 12为系统的悬浮力曲线。通过计算机仿真计算,可看出垂直位移h=0.04 m时悬浮力达到1.8×106N,基本满足悬浮质量的要求。垂直位移增大到0.05 m时悬力也迅速增大到2.5×106N,由此可知微小的悬浮力差别系统可通过少许调整垂直位移自行达到稳定,事实上整个加速过程中系统所受悬浮力恒等于重力,保持不变,故垂直位移随着速度的增大而减小,当速度增大到一定值后对悬浮力基本不再产生影响。
根据以上分析可知表3 中的参数设计基本满足航天助推发射中的悬浮性能要求,各设计参数的变化与助推发射中系统体积增大、轨道变宽等变化相适应,最终得出了合理的结果。这种变化也对线圈强度、系统抗振性、推进系统等提出了更高的技术要求。

表3 航天磁悬浮助推发射参数的确定
5 结论
1) 在相当高的速度下,由于电流的原因,悬浮力的增加不再明显,这也确保了助推系统在高速运行时的稳定性;
2) 在相同的结构参数下,垂直气隙的变化会对悬浮力水平造成相当显著的影响,体现了EDS系统良好的悬浮刚度;
3) 超导线圈所受的悬浮力、导向力和磁阻力都按一定的频率呈现量值上的微小变动,这就导致系统运行时会产生周期性振动,这种振动主要源于悬浮线圈和超导线圈的非连续分布;
4) 结合航天运载器发射的技术要求,对上文设计参数进行优化,初步设计了一个航天磁悬浮助推发射系统,可以实现在助推发射速度达到0.8Ma时悬浮力2 500 kN左右,并有效地降低了系统的振动,满足运载质量100 t以上。
[1] 孙广勃.降低航天发射成本的必由之路(上)国外可重复使用运载器的技术进展[J].国际航空,2001(7):49-51.
[2] 康开华.英国“云霄塔”空天飞机的最新进展[J].国际太空,2014(7):42-50..
[3] WILLIAM A J.Magnetic Launch Assist—NASA’s Vision for the Future.IEEE.2001.
[4] SCHULTZ J H,RADOVINSKY A,THOME R J,et al.Superconducting Magnets for Maglifter Launch Assist Sleds[M].IEEE.2001.
[5] 杨文将,刘宇,温正,段毅,陈晓东.可用于航天助推发射的高温超导磁悬浮技术[J].宇航学报,2007(3):522-526,550.
[6] 乔宝榆.高温超导电动式磁悬浮系统装置及实验研究[D].北京:北京交通大学,2014..
[7] 文静.日本MLX01型超导磁悬浮列车[J].国际技术经济研究,1999(4):10.
[8] 曾文辉,范瑜,刘亚静,等.高温超导电动式磁悬浮系统的建模仿真[J].微电机,2013(1):37-40.
[9] 赵春发.磁悬浮车辆系统动力学研究[D].成都:西南交通大学,2002.
[10] 万尚军.电动悬浮型磁悬浮列车悬浮与导向技术剖析[J].中国电机工程学报,2000(9):23-26,32.
[11] KENT DAVEY.Designing with Null Flux Coils [M].IEEE.1977.
[12] 时瑾.高速磁浮交通线路平竖曲线主要技术参数研究[C]//国务院学位委员会、教育部学位管理与研究生教育司.可持续发展的中国交通——2005全国博士生学术论坛(交通运输工程学科)论文集(下册).国务院学位委员会、教育部学位管理与研究生教育司,2005.
[13] 田录林,张靠社,王德意,田琦,刘家军,李知航.永磁导轨悬浮和导向磁力研究[J].中国电机工程学报,2008(21):135-139.
[14] JIAN Lianghe,DONALD M R,HOWARD T.Coffey.Applications of the dynamic circuit theory to maglev suspension systems [J].IEEE Transactions on magnetics,1993,29(6).
[15] BURKHARD E E,SCHWARTZ J,NAKAMAE S.Analysis of superconducting magnet-ground coil interactions for EDS maglev coil configurations [J].IEEE Transactions on applied superconductivity,1993,3(1).
猜你喜欢
大电机技术(2022年5期)2022-11-17
大电机技术(2022年2期)2022-06-05
大电机技术(2022年2期)2022-06-05
小猕猴智力画刊(2022年4期)2022-05-23
上海人大月刊(2022年5期)2022-05-19
小学科学(学生版)(2021年4期)2021-07-23
弹箭与制导学报(2018年1期)2018-11-13
人大建设(2018年6期)2018-08-16
当代陕西(2018年6期)2018-05-22
军事文摘(2017年16期)2018-01-19