
星球探测车运行方式选择策略
2018-06-01 10:59尤波田朋丁亮高海波
哈尔滨理工大学学报 2018年2期
尤波 田朋 丁亮 高海波

摘 要:在外太空复杂的未知环境下,星球探测车如何以尽可能短的路径安全的行驶到目标位置是探测车完成探测任务的前提条件。针对此问题,提出了一种探测车在复杂地形环境下的运行方式选择策略,此策略采用多种传感器实时检测车体运行周围障碍物信息和车体运行参数的方法,对车体进行避障或是越障运行方式进行判断选择,在越障的同时检测车体姿态角度、加速度和驱动电机电流的变化情况以对车体运行的安全性进行判断。此策略增加了探测车自主运行的灵活性,可在保证车体运行安全的前提下减少探测车的行驶路径。
关键词:星球探测车;传感器检测;越障;运行方式选择
DOI:10.15938/j.jhust.2018.02.008
中圖分类号: TP273
文献标志码: A
文章编号: 1007-2683(2018)02-0040-06
Abstract:Under the complex unknown environment of outer space, how the planet rovers safely run to the target location in a competitive short path is the precondition of finishing planet rover′s exploring mission. In response to this issue, this paper proposes a strategy of the way in which planet rover works under the complex terrain environment. This strategy adopts a variety of sensors to test the obstacle information around when the planet rover is running and the way of vehicle running parameters in real time. It aims at making choices and adjudgements of vehicle′s operation way in the process of obstacle avoidance and crossing. At the same time of obstacle crossing, it detects vehicle′s posture angle and the change of acceleration and drive motor current situation to determine the safety of vehicle running. Meanwhile,the strategy will make the planet rover more flexible which is operating automatically. It also can reduce the planet rover′s running path on the premise of ensuring the vehicle′s safe operation.
Keywords:planet rover; sensor detection; obstacle crossing; operation mode choice
0 引 言
随着科技的发展和生存的要求,人类已经不局限于探索自身生存的地球,近些年对外太空的探索越来越受到人们的关注[1]。星球探测车是研究未知星球的主要器械,针对外星球复杂的地形环境,如何保证星球探测车以尽可能短的路径安全的运行到探测位置是探测车完成科学实验的前提条件[2-4]。
文[5-8]中只是对车体识别障碍后如何进行避障的问题提出了策略,但是并没有考虑到车体爬越过不同的障碍物的情况。文[9-11]中通过视觉设备检测障碍物的形状,经过数据转换实现对障碍物相关信息的获取,以选择车体的运行方式,但是对形状不规则或是斜坡面凹凸不平整的障碍物,该方法并不适用。文[12-16]虽然对车体爬坡越障进行了阐述,但是对车体运行方式选择的条件说明较少。
本文基于传感器检测原理和车体动力学分析,提出一种探测车在复杂地形环境下的运行方式选择策略,即:星球探测车在运行时,根据传感器检测周围的运行环境,以确定车体进行避障或是越障运行,在越障过程中通过实时检测车体运行参数的变化对车体的运行安全做出判断,以确定继续运行或是放弃当前的运行模式。此策略改变了以往车体遇到障碍物只进行避障绕行的运行方式,可使探测车爬越过一定的障碍物,减少了探测车由起始点到目标点的运行距离。
1 系统介绍
1.1 探测车结构分析
星球探测车主要由4个驱动轮,两个转向机构和矩形车体以及其他控制器件组成,其构型如图1所示。驱动轮能独立驱动,前后转向机构也能单独完成转向,车体前端安装有多个超声波传感器检测模块,位姿传感器位于车体的几何中心处。多个超声波传感器同时进行检测可获取关于障碍物更加精确的信息,电流采集卡实时采集电机的电流数值并和位姿传感器实时采集的车体姿态角和加速度等信息反馈给控制系统,使系统对车体的运行安全作出判断。
1.2 地形识别
星球表面地形结构复杂,相对平坦的区域以碎石、小环形山为主,地势起伏较大的区域主要以山脉、斜坡和大环形山为主,复杂的地形结构往往更具有探测价值,因此星球车的探测区域一般都选在地形结构相对复杂的区域进行。探测车从起始位置运行到地形结构复杂的目标位置,期间会通过多种地形,探测车依据车载传感器检测数值的变化对地形环境进行识别。超声波传感器[17-20]检测车体周围的障碍物信息,位姿传感器检测车体的俯仰角和加速度的变化情况,在相对平坦的地形区域运行,车体姿态角变化较小,在地形起伏较大的地带运行时,车体的姿态角会发生明显的变化。因此,可由车体俯仰角度的变化对地形的起伏情况进行判别。
1.3 运行方式选择原理
在确定探测目标位置后,探测车首先会将当前起始点和目标点连接起来形成最短行驶路径,然后按着这条最短路径运行。利用超声波传感器来检测探测车运行前方障碍物的信息,将采集到的障碍物的数据信息进行分析处理后以判断车体进行避障或是越障运行。车体进行越障的过程中,通过实时检测车体的加速度和倾角以及电机电流的变化来对车体运行安全做出判断。如果车体运行时的各项参数都在安全范围之内,则车体继续越障运行,当任一变量的变化超出车体运行的安全范围,则车体停止运行,并后退至安全位置后开始避障运行。
1.4 系统控制流程
传感器采集的实时数据经过数据处理器处理之后發送给控制器,经由控制器进行相关解算,以确定车体的运行状态是否安全,控制器根据车体的运行状态再发送指令到电机驱动器以控制电机的运转。控制系统示意图如下图2所示。
2 越障分析
越障性能反映了探测车在星球表面通过各种地形的行走能力,不同的地形对探测车的行驶性能有很大的影响。探测车的越障功能主要有两种:垂直越障和爬坡越障,垂直越障是指障碍物的体积较小,车体前后轮可依次爬越过障碍物的越障方式,爬坡越障是指车体爬越具有一定倾角斜坡的越障方式。以下对探测车在行驶过程中的垂直越障和斜坡越障过程进行分析。
2.1 垂直越障
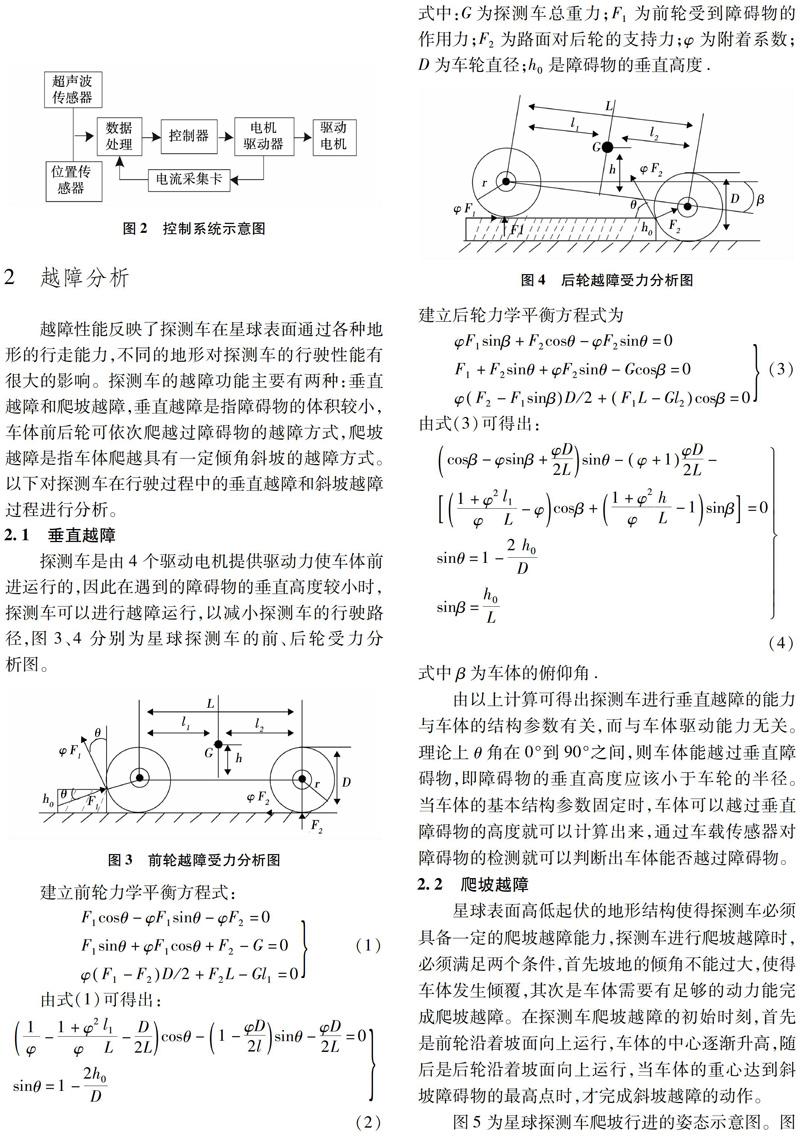
探测车是由4个驱动电机提供驱动力使车体前进运行的,因此在遇到的障碍物的垂直高度较小时,探测车可以进行越障运行,以减小探测车的行驶路径,图3、4分别为星球探测车的前、后轮受力分析图。
由以上计算可得出探测车进行垂直越障的能力与车体的结构参数有关,而与车体驱动能力无关。理论上θ角在0°到90°之间,则车体能越过垂直障碍物,即障碍物的垂直高度应该小于车轮的半径。当车体的基本结构参数固定时,车体可以越过垂直障碍物的高度就可以计算出来,通过车载传感器对障碍物的检测就可以判断出车体能否越过障碍物。
2.2 爬坡越障
星球表面高低起伏的地形结构使得探测车必须具备一定的爬坡越障能力,探测车进行爬坡越障时,必须满足两个条件,首先坡地的倾角不能过大,使得车体发生倾覆,其次是车体需要有足够的动力能完成爬坡越障。在探测车爬坡越障的初始时刻,首先是前轮沿着坡面向上运行,车体的中心逐渐升高,随后是后轮沿着坡面向上运行,当车体的重心达到斜坡障碍物的最高点时,才完成斜坡越障的动作。
图5为星球探测车爬坡行进的姿态示意图。图中,O为探测车的重心;α为斜坡倾角;O1、O2为前后轮的轴心;r为车轮的半径;l1为机器人重心O到前轮轴连线沿斜坡平面的距离;l2为机器人重心O到后轮轴连线沿斜坡平面的距离;L为O1O2间的长度;γ为O2O与O1O2间的夹角;A点为后轮与坡面的接触点;B点为前轮与坡面的接触点;d为重心O到A点的水平距离;h为重心O到车轮轴线的垂直高度;Ni为车轮在Y轴方向受到的支持力;Mi为车轮的驱动力矩,V为车体的运行速度;a为加速度。
如上图所示,探测车进行爬坡越障时,由于坡面凹凸不平,车体的爬坡角度是变化的。A点是坡面凹陷的最低点,B点是坡面凸起的最高点,此时,车体的爬坡角度达到最大,随之上坡阻力达到最大,极易发生车体倾覆。
探测车不发生倾覆的条件是车体的重心点O的垂直投影落在O1O2范围里,即重心O到A点的水平距离d应该大于零,斜坡的角度增加时,d的值将减小,当d=0时,车体处于临界稳定状态,当d<0时,车体处于不稳定状态。因此探测正向爬坡不产生倾覆的条件为:
3 运行方式选择策略
探测车在正常运行情况下,驱动电机的电流值在一个安全范围里波动,车体在运行方向的加速度数值和车体的俯仰角度基本维持在零度左右。当检测到障碍物时,车体以何种方式运行需要根据障碍物的信息和车体自身的结构参数进行判断,依据判断结果选择车体安全的运行方式。
3.1 运行方式选择约束条件
为了保证探测车的安全运行,探测车进行越障时必须满足一定的条件。以下S1和S2分别是探测车进行垂直越障和爬坡越障的约束条件。
式中:I0为驱动电机的额定电流值;I为电机的实时电流值;β0为车体最大爬坡角度;β为车体的实时俯仰角;α为车体的加速度。
探测车进行越障时必须满足约束条件,否则可能会对车体的硬件设备和车体结构造成损坏。探测车进行垂直越障时,障碍物的高度必须小于车轮的半径,进行斜坡越障时,坡度角不能超过车体的最大越障角度,驱动电机的电流不能超过额定值,加速度不能小于零,否则,探测车必须进行避障运行以绕开障碍物。
当探测车在凹凸不平的斜坡上运行时,车体俯仰角变化明显,上坡阻力会随着车体俯仰角的改变而发生变化,因此需要提升电机功率来增大电机的输出力矩,以增加车轮的驱动力,电机电流在额定值以下时,电机力矩与电机电流成正比,电机电流超过额定值后,电机力矩不在随着电机电流的增加而增加,并且力矩与驱动力成正比。
当电机电流超过额定值时,电机力矩达到最大值,随着车体越障角度的增大,车体所受的合力变成逐渐增大的反方向力,加速度也随之发生改变,车体运行速度逐渐减小至零。此时,车体的重心没有达到障碍物的最高点,则认为探测车不能完成斜坡越障。长时间的使电机超负荷运行会对电机造成损害,所以可以通过检测电机电流和车体运行加速度的变化情况对障碍物是否可越做出判断。
3.2 运行方式选择策略
探测车依照最短行驶路径运行的过程中,通过对车体周围运行环境的实时监测,以确定车体与障碍物的相对位置和障碍物的相关信息。针对不同的运行环境,选择不同的运行方式行驶到目标位置。
障碍物的垂直高度大于车轮半径,车体进行避障运行绕开障碍物,垂直高度小于车轮半径,符合越障约束条件时,车体进行越障运行。
斜坡位于车体的最短行驶路径中,由于无法检测到斜坡的最大倾角,车体在进行爬坡越障的同时通过传感器实时监测车体各个运行参数的变化情况,各参数满足爬坡越障的约束条件,则车体继续运行直到安全的完成爬坡越障,当不满足爬坡越障的约束条件时,车体立即停止,随后调整运行方式或是按原路后退至距离斜坡一定距离,再进行避障运行。
探测车每次执行完一个动作后,都会以当前点为起始点重新确定最短行驶路径,然后继续检测运行环境。
4 仿真分析
星球探测车的各项参数如下:车体总质量为80kg,电机额定输出力矩M=8.5N·m,提供的最大驱动力约为28.5N,车轮滚动阻力系数为λ=0.2。由式(7)可得出探测车的最大爬坡角度约为30°。
车体以不同的加速度爬坡时,由式(10)可得到探测车爬坡角度与驱動电机电流关系图如图6所示。
由图6可见,探测车以不同的加速度爬越不同倾角的斜坡障碍物时,驱动电机电流随着加速度和爬坡角度的增加而增大,在相同的电流情况下,车体所爬越斜坡的最大角度随着加速度的增大而减小。车体分别以加速度为0、0.1、0.2m/s2爬越不同倾角的斜坡,车体匀速运行时所能爬越的角度最大,加速度为0.2m/s2时,车体所能爬越斜坡的角度最小。
在驱动电机的额定输出功率下,探测车爬越不同角度斜坡时,由式(7)可得到在相同时间里车体行驶位移与坡度倾角的关系图如图7所示。
由图7可见,探测车的驱动电机在额定功率运行,电机驱动力达到最大时,在相同时间里车体的行驶位移与车体的爬坡角度成反比,斜坡倾角为25°时,车体的驱动力大于运行阻力,加速度为正值,车体做加速爬坡运行。斜坡倾角为30°时,车体所受合力为0,加速度为0,车体做匀速爬坡运行。斜坡倾角为35°时,上坡阻力大于电机提供的驱动力,车体所受合力与运行方向相反,加速度小于0,车体做减速爬坡运行。
5 结 论
本文对星球探测车在未知的环境中运行时如何选择避障或越障运行并保证车体越障时的安全性问题,提出了一种车体运行方式选择策略,通过对障碍物的检测以及越障时车体相关参数的变化情况,对车体实行避障或越障运行做出选择,改变了传统的探测车遇到障碍物只进行避障运行的方式,在一定程度上减少了探测车的行驶路径。通过仿真验证了车体爬越不同倾角斜坡时各项安全参数的有效性,从而验证了此策略的合理性和可行性。
参 考 文 献:
[1]NAKASHIMA H, FUJII H [M]. Journal of Terramech-anics , 2015, 47(5): 307-321.
[2]ERIKA Ottaviano, PIERLUIGI Rea, GIANNI Castelli. THROO: a Tracked Hybrid Rover to Overpass Obstacles[J].Advanced Robotics, 2014, 28(10): 683-694.
[3]BUDIHARTO W, SANTOSO A, PURWANTO D, et al. A New Method of Obstacle Avoidance for Service Robots in Indoor Environments[J]. ITB Journal of Engineering Science, 2012,42(2):149-168.
[4]李楠,高海波,丁亮,等.摇臂转向架式星球车地形估计方[J].哈尔滨理工大学学报,2015,20(3):24-29.
[5]DEEPA E G, UNNIKRISHNAN A.On the Divergence of Information Filter for Multi Sensors Fusion[J].Information Fusion,2016,27: 107-109.
[6]陈绍茹,陈奕梅.基于多传感器信息融合的移动机器人避障[J].传感器与微系统,2014,33(5):35-38.
[7]王加,纪伯公.多传感器信息融合技术在空中目标识别中的应用研究[C]// 第八届全国信号和智能信息处理与应用学术会议论文集,2014:183-187.
[8]谷凤伟,金西虎,姜珊.基于双目视觉信息融合的移动机器人避障研究[J].电子世界,2015(18):54-57.
[9]王檀彬,陈无畏,李进,等.多传感器融合的视觉导航智能车避障仿真研究[J].系统仿真学报,2009,21(4):1015-1019.
[10]刘钊.基于多传感器信息融合的智能轮椅避障及运动控制研究 [D].北京:北京工业大学,2015:15-17.
[11]蔡英凤,王海,陈小波,等.基于单双目视觉融合的车辆检测和跟踪算法[J].交通运输工程学报,2015,15(6):118-126.
[12]马泽润,郭为忠,高峰.一种新型轮腿式移动机器人的越障能力分析[J].机械设计与研究,2015,31(4):6-10,15.
[13]NGUYEN H T, HAI X L.Path Planning and Obstacle Avoidance Approaches for Mobile Robot[J].International Journal of Computer Science Issues, 2016,13(4):1-10.
[14]曾令斌,邱宝贵,肖杰,等.月面机器人探测路线及典型方案研究[J].载人航天,2015,21(3):263-264.
[15]尹理才,侍才洪,陈炜,等.六轮救援机器人越障动力学建模分析[C]// 中国力学大会-2015论文摘要集,2015:257-258.
[16]汪明磊,陈无畏,王家恩.智能车辆车道保持系统中避障路径规划[J].合肥工业大学学报,2015,3(2):130-132.
[17]曾一民.基于超声波的机器人避障和目标跟踪方法的研究[D].成都:电子科技大学,2008:15-17.
[18]杨芳沛,李伟光,郑少华,等.基于超声波传感器的AGV避障模块设计与实现[J]. 电子设计工程,2015,23(22):56-57.
[19]DVORAK J S, STONE M L, SELF K P.Object Detection for Agricultural and Construction Environments Using an Ultrasonic Sensor[J]. Journal of Agricultural Safety and Health, 2016,22:107-109.
[20]谭苗苗,于路路,王静.小型环境检测轮式机器人的避障控制系统研究[J].机械工程师,2016,3(2):10-11.
(编辑:温泽宇)
