
不同初始温度条件下脉冲大电流直线电机滑动电接触研究
2018-05-26 03:06康凯周利
中国设备工程 2018年10期
康凯,周利
(1.中科院电工研究所;2.中国科学院大学,北京 100190)
脉冲大电流直线电机是通过脉冲大电流所产生的高电磁力推动金属滑块,形成极高的加速度,在较短的时间内获得很大的动能。在整个系统中,采用几十MJ甚至几百MJ的电能作为初级能源,通过调制驱动电流的幅值和脉宽,驱动滑块在几万个G的加速度运动,使滑块在离开轨道时获得数km/s的初速。在直线电机的驱动过程中,滑块和轨道接触表面不但存在相互摩擦、材料软化、张力变形等力学现象,还存在电阻热、电弧等一系列电学行为,导致该接触面状态发生变化。滑动电接触状态影响推进装置的稳定性、初速度及系统效率,对脉冲大电流直线电机的研究具有重要意义。
本文通过对直线电机内部结构进行设计,将电加热装置引入电机内部,可对轨道进行预加热处理,从而使电机驱动初始阶段,轨道和滑块就获得一定的温度。在滑块型号、驱动电流保持一致的前提下,进行不同轨道初始温度(15℃、50℃和100℃)条件下的电机启动试验。通过测量驱动电流、轨道端口电压、滑块速度、温度等数据,并依此对不同初始温度条件下的脉冲大电流直线电机的滑动电接触状态进行分析。
1 电机系统
脉冲大电流直线电机系统结构示意图如图1所示,由电机主体、脉冲电源系统、滑块、控制系统、接地系统和测量系统组成。控制系统设置脉冲电源系统的放电时序、驱动电流汇入电机,滑块受电磁力加速,直至脱离电机轨道,测量系统同时进行电压、电流及速度信号的采集,完成一次驱动试验。电机主体结构如图2所示。
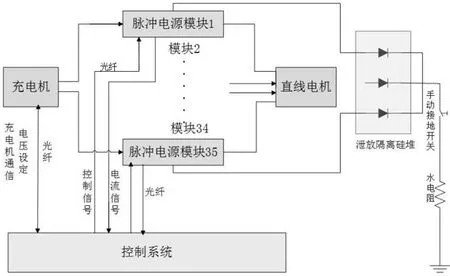
图1 电机系统结构示意图
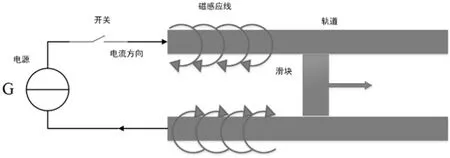
图2 电机主体结构图
2 试验及结果分析
2.1 试验条件
实验室室温为15℃,通过加热装置对轨道进行预加热,将轨道初始温度分别加热到50℃和100℃,并维持在预加热温度。
整个系统由最大储能达3MJ的电容器组驱动,通过改变充电电压的幅值来调节模块储能及输出电流的大小。试验充电电压均为1800V,滑块均采用经优化后的C型结构,质量约为42.3g,并保证滑块安装条件(预紧力、滑块初始位置)及轨道表面条件(间距、表面粗糙度)基本一致。
2.2 试验结果分析
接触电阻是反映滑块和轨道滑动电接触性能的一个重要指标,接触电阻的大小和驱动电流、接触面温度、预紧力等因素有关。试验所获得的电机首端电阻曲线如图3所示,可以看出接触电阻是变化的。
在t=0时刻,滑块与轨道的接触形式属于固态-固态金属接触,接触压力对接触电阻的作用起主导地位,接触压力仅由初始预紧力提供,实际接触面积小于宏观接触面积,所以接触电阻较大。随着电流的增加,电磁力增加,接触压力逐渐增大,同时伴随着温度上升滑块表面材料会逐渐软化,实际接触面积持续增加,因此接触电阻逐渐下降,直到A点达到最小值。

图3 驱动电流和枢轨接触电阻
在整个过程中,滑块由于受大电流加热作用,温度一直保持上升,而温度升高对接触电阻有两方面影响,一是能使接触面材料软化增大接触面积而减小接触电阻,二是会造成电阻率增大。在A-B阶段,驱动电流处于平顶期,接触压力几乎不变,滑块运动速度高,轨道温升对接触电阻的影响相互制约,所以接触电阻变化较小。
在B-C时间段内,枢轨接触阻抗逐渐增加。主要是由于驱动电流下降,C型滑块两翼间的电磁力变小,接触压力下降,当接触压力与材料软化作用带来的接触面积增加效应不再明显时,电阻率的增大效应逐渐占主导作用,使接触电阻呈现近似线性增加的趋势。
转捩点P的变化主要是由于电流的下降引起的,电流下降一方面会使得处于液态金属接触状态的滑块和轨道的接触应力下降,造成实际接触面积减小,而另一方面电流下降会在接触面上感应出反向涡流,将液态金属从接触面上拖拽出来,使接触状态恶化,因此P点亦称之为接触转捩点。由图4可以看出,不同初始温度条件下,转捩时刻会有所不同,初始温度越高,转捩点会延迟。
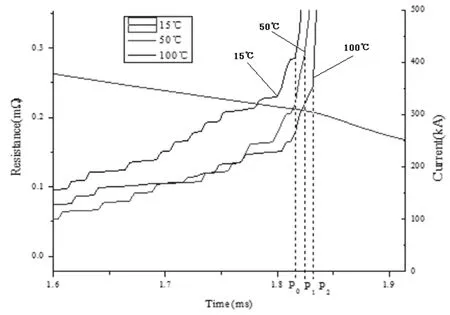
图4 不同初始温度条件下的接触电阻
3 结语
接触电阻大小主要受驱动电流和轨道和滑块的温度影响。温度对接触电阻的影响是两方面的。而驱动电流影响接触压力的大小,通过改变枢轨接触面积而改变接触电阻大小,总的来说,在初始温度100℃以内,接触电阻受驱动电流的影响更大。
参考文献:
[1]Motes D, Keena J, Womack K, Stefani F, Crawford M. Thermal Analysis of High-Energy Railgun Tests [J]. Plasma Science, IEEE Transactions on Magnetics, 2012,40(1):124-130.
[2]F. Stefani, S. Levinson, S. Satapathy, J. Parker Electrodynamic transition in solid armature railguns [J]. IEEE Transactions on Magnetics,2001,37(1):101-105.
[3]刘传谱,袁伟群,严萍等.重复推进滑动电接触的试验研究[J].强激光与粒子束,2010,22(4):923-926.
[4]徐伟东,袁伟群,陈允等.电磁轨道驱动器连续驱动的滑动电接触 [J].强激光与粒子束,2012,24(03):668-672.
[5]程诚,关永超,何勇等.磁探针方法测串联增强型固体电枢电磁轨道炮内弹道速度 [J].高电压物理学报,2013,(27):901-907
[6]李昕.电磁轨道炮电枢特性理论研究 [D].南京理工大学,2009.
[7]李鹤,雷彬,吕庆敖等. 电磁轨道炮电枢接触界面温度场仿真研究 [J]. 润滑与密封,2012,37(11):22-26,38.
[8]陈允,徐伟东,袁伟群等.电磁驱动中铝电枢与不同材料导轨间的滑动电接触特性[J].高电压技术,2013,39(04):937-94.
猜你喜欢
中学生数理化·中考版(2020年10期)2020-11-27
制造技术与机床(2019年8期)2019-09-03
中学生数理化·中考版(2018年11期)2019-01-31
意林(绘英语)(2018年1期)2018-04-28
制造技术与机床(2017年3期)2017-06-23
婚姻与家庭·性情读本(2017年1期)2017-02-16
中国塑料(2015年9期)2015-10-14
中学生数理化·中考版(2015年10期)2015-09-10
汽车与新动力(2015年1期)2015-02-27
雷达学报(2014年4期)2014-04-23
