盲道巡检器寻迹模块与WiFi模块
2018-05-21 07:45居笑天
时代农机 2018年2期
居笑天,张 维,李 谨
(天津农学院 工程技术学院,天津 300384)
在现如今的生活中,对机器的使用都离不开控制二字,而如果实现控制或者说如果更好地实现控制则成了我们追求的目标。远程控制技术一直是备受青睐的。远程控制是利用无线或电信号对远端的设备进行操作的一种能力。
远程控制可以使用手机、电脑控联网的灯、窗帘、电视机、摄像机、投影机、指挥中心、大型会议室等,当然也包括小车。文章将着重介绍小车WiFi模块。
1 模块介绍
(1)红外循迹模块。本小车暂使用红外循黑线来模拟,在后续模拟中,设定为遇粗糙地面则发生漫反射,输出高电平,而遇到光滑砖面是则为反射输出低电平。
(2)ZYWiFi智能模块。该模块采用高通AR9331芯片,是一个高度集成的W蕴AN解决方案。本模块体积小、功耗低、发热量小,wifi、网口传输性能稳定。
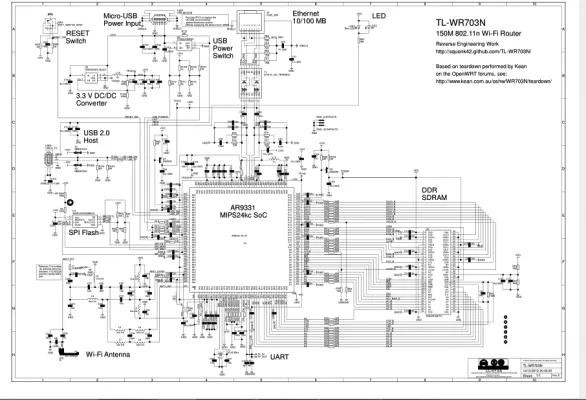
图1 TL-WR703N原理框图
运行openwrt(linux)系统,可长期稳定运行。模块外围电路非常简单,仅需加上3.3V DC电源,即可让系统启动,并可通过WIFI控制。采用 2个1×19 2.0mm 镀金排针接口,可非常稳定的固定在底板上。该模块预置工作open wrt固件,适配工作室各系列驱动板,实现视频传输及指令双向传输功能。
核心板的供电电压为3.3V,平均电流130mA左右。为了保证核心板稳定运行,本小组采用的是500mA电源供电。根据实际情况进行调节,但不应低于300mA。
2 部分成果(电机部分程序)
GPIO_InitStructure.GPIO_Pin=蕴EFT_MOTOR_GO;//左 电机方向控制 PB7
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_Out_PP;
GPIO_Init (蕴EFT_MOTOR_GO_GPIO,&GPIO_InitStructure);
GPIO_InitStructure.GPIO_Pin=蕴EFT_MOTOR_PWM;// 左电机PWM控制 PB8
GPIO_InitStructure.GPIO_Speed=GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode=GPIO_Mode_AF_PP;// 复用推挽输出
3 结语
小组研究设计的盲道循迹小车能切实地改善解决盲道出行问题,给广大盲人朋友一个安全、畅通的出行环境,为其生活带来来自社会的幸福。在WIFI模块调试和智能红外线循迹方面的研究已接近尾声。然而对盲道的鉴别依然进展不如预期,接下来会改善实验不足,完善未做工作,以达最佳使用效果。
参考文献
[1]吴鹏.基于3G网络的ROV远程控制系统设计与实现[D].吉林:吉林大学,2017.
[2]蔡利民,侯群,张龙,等.Android软件在智能鱼缸远程控制系统中的应用设计[J].自动化技术与应用,2016,35(9):27-30垣70.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
青少年日记·小学生版(2019年2期)2019-09-02
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
文苑(2018年22期)2018-11-19
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
小主人报(2016年2期)2016-02-28
小学生作文·小学低年级适用(2014年7期)2014-09-10