
基于GPS的车载智能数据监控终端的研究
2018-05-18 09:23韩思成
机械管理开发 2018年4期
韩思成
(中国药科大学理学院, 江苏 南京 211198)
引言
随着我国IT产业的发展和信息化水平的不断提高,信息化管理系统在机电设备的管理、使用、维修和保障中的应用越来越广泛[1-2]。信息化技术同样深刻地影响了军事装备的研制与发展[3]。信息化管理的实质在于管理对象信息的实时与准确获取,以及对装备管理信息的实时反馈。为了对装备在执行任务中进行高效、准确的信息化管理与控制,车载状态智能监控终端、高效通信网络和分布式监测系统的开发成为车辆管理信息化系统开发的前沿热点。
基于嵌入式技术的各种车辆状态监控终端在军事装备上的应用已经比较广泛,如在30 kW电站和伸缩臂叉装车上的嵌入式数据采集终端,具有语音提示、故障报警和诊断等功能[4]。许多其他工程车辆上也安装有类似数据采集设备,能够进行桥梁架设、战场扫雷等作业的状态监测和故障诊断。但是,这些装备上的终端采集设备受装备型号和使用环境的限制,通用性不强,功能比较简单;由于各种终端缺少统一的接口规范及相关协议,设备本身的通信模式与数据采集系统不完善,难以组建有效的车载终端控制网络;采集的信息不完善、不全面。这些都导致设备状态信息不能被实时传输和有效互通[5]。
针对这些应用中存在的问题,本文采用嵌入式ARM控制器开发了一种车载智能管理与控制系统。该系统由车载智能终端和远程控制中心两部分组成,具有以下功能:对工程车辆的运行状态进行监测,实时准确地记录采集参数,实现故障报警与诊断;通过GPRS将装备的状态数据发送到控制中心数据库,经计算机程序分析,给出维修建议,实现关务的远程维护;通过控制中心与车载终端的信息交互,实现对工程车辆的远程管理。该系统的使用,可以实现如下目标:提高装备的信息化水平,使装备管理实现精确化、智能化和可视化;通过控制中心与信息管理系统的集成,实现工程车辆的全寿命、全过程管理。
1 系统功能结构与总体方案设计
车辆管理信息化系统由两部分组成,其中智能车载终端安装于工程车辆的驾驶室内,用于监控工程车辆的运行状态并实时传输相关数据;而管理控制中心主要由服务器或计算机等组成,负责接收智能终端传递过来的信息,对其进行处理后做出决策并回传给智能终端或与管理人员进行交互操作。管理中心和智能终端二者之间通过GPRS通讯模块实现信息交互。车辆信息化管理系统的分布式结构如下页图1所示。利用基于北斗卫星的通信网络的车载GPS/GPRS设备实现装备的定位。数据采集器通过工程车辆(如装载机)上的各种传感器,采集工程车辆底盘、工作装置及环境参数信息,按照协议由GPRS通信设备经移动通信网络与车辆上的智能车载监控终端进行互联互通。从终端获取的工况参数由数据库管理系统进行处理,管理中心通过GPRS/GPS网络和数据库管理系统实现对后台数据和终端信息的综合管理、实时控制。各主要组成部分的功能如下:
1)数据采集器。数据采集器采用嵌入式ARM芯片STM32为核心设计,通过车辆上安装的发动机温度传感器、主油道压力传感器、油位传感器、发动机及车辆转速传感器和ECU中的计时装备等获取车辆的工况信息,通过专用总线上传至显示器单元进行实时显示。

图1 系统总体结构图
2)GPS/GPRS处理单元。经北斗卫星通信系统获取车辆的GPS信息,并从显示器单元获取工况信息经GPRS系统发送给服务器。同时,也接收服务器下传的信息,转发给显示器单元或传输至存储模块进行数据储存处理。
3)专用显示器集成单元。显示器单元内部集成有控制器、驱动电路、存储设备和其他功能单元,能够接收数据采集系统传来的数据,根据数据信息,执行数据存储、状态报警与异常显示、故障诊断与维修指导、人机交互、数据电子手册的显示与查询等功能。
4)控制中心。控制中心接收车载终端传来的GPS定位信息,在电子地图上标示出装备的地理位置;通过分析车载终端传来的装备运行状态参数,可以实现对机械装备的远程管理,远程维修和远程控制;管理系统软件可以明确掌握配发装备的地理位置、运行的性能参数、整机工作时间、故障发生频率、远程故障诊断等信息。
2 智能嵌入式终端硬件设计
2.1 车载终端硬件结构
车载终端由数据采集器、LCD触摸/显示器、GPS/GPRS模块、通信收发模块和信号调理模块等组成,总体架构如图2所示。数据采集器是其中的控制核心,包含STM32嵌入式处理器、电源模块、北斗定位信号处理模块、通用无线分级协议/短信息处理模块、液晶大屏(LCD)集成处理模块等。该终端的电源供给来自于车载电瓶,由电源模块处理后,既可在线向LCD模块提供驱动电压,也可向可充电电池组充电,当车辆熄火或故障不能向智能终端供电时,由后备可充电电池向整个监控系统供电,以保证在较低功耗模式下,采集必要的工况数据,进行报警和数据信息向管理中心的上传。智能终端的信息包含了GPS定位信息、GPRS短信、CAN通信总线等,种类多、通信机理复杂,电路中设计中多种通信处理模块进行处理,因此应针对性地设计专门的模块供电电源。STM32处理器负责数据采集、信号处理、系统管理及模块间信息交互等。SIM900A工业级通信处理模块主要用于将ARM微处理器STM32发出的控制信息转送给终端器件和管理中心。鉴于国内分布广泛、通信可靠的GPRS移动通信网络硬件条件的成熟,该系统可以方便、可靠地通过GPRS移动网络实现各个工程车辆智能监控终端和管理中心之间的通信连接。通用信息的收发通常采用GPRS通信方式,而对于重要的关键参数和一些报警参数信息则采用手机短信发送形式。

图2 硬件设计框图
工程车智能监控终端硬件除上述主要模块外,还有一些硬件附属电路。如用于外部数据存储的SD卡接口电路、非易失存储电路(E2PROM)、模块间的地址转换与信号匹配电路等。对于字符和一些图形与图片资源的显示,则采用事先制作相应的字库或图片资源并将其存储为文件格式保存在SD卡中,触摸显示屏通过驱动和转换电路从文件中读取相应的汉字或图片资源并显示在LCD上。系统中的断电保护电路的功能是在系统失电情况下,将电路转入低功耗状态,保持存储电路及其他关键电路的工作。车载终端的重要参数和配置化信息存储在类似BIOS(E2PROM)电路中。
2.2 硬件电路的设计
2.2.1 MCU电路的设计
系统的主控制芯片(STM32)是数据采集器和整个智能终端的核心元件,负责装备工况参数(如油温、油压、油量、转速、行驶速度和工作时间等)的采集与处理,LCD触摸显示屏和其他通信模块的驱动与信息交互等[6]。智能监控终端的主MCU采用了增强型32位ARM微控制器STM32F103ZET6,片内集成有512 kB字节的闪存存储器、64 kB字节的静态随机存储器(SDRM)等。MCU的主振荡频率为高达72 MHz,封装形式采用144脚封装。芯片的功能十分强大,性价比很高。芯片自带扩展总线FSMC,能够很方便地扩展外部SRAM容量和连接外接显示电路(LCD)。FSMC总线具有很高的传输特性,用其驱动显示电路可显著提高LCD的刷新频率。
2.2.2 UM220电路设计
UM220模块是一种北斗卫星定位模块,在实际使用时通常配置为北斗/GPS双通信模式系统。该芯片具有结构紧凑、功能强大和能耗较低等优点,能够用于多种移动车辆的定位。
2.2.3 SIM900A模块电路设计
SIM900A是一款GSM/GPRS通信芯片,其封装形式为SMT模式,其微控制器架构采用了32位ARM架构,芯片集成有内置程序和数据存储器,用户应用程序可直接写入其芯片的程序存储区域。该芯片功能强大、应用面广、可靠性强,可应用于各种车辆等移动目标的动态跟踪、机群智能化管理、手持式POS机和个人智能数据终端(PDA)、手持式抄表与远程监控等多种领域。该芯片的接口采用了业界最可靠的工业级接口,频率范围从900到1800 MHz,支持多种低功耗信息传输模式,如语言信号、短消息、数据流等。
2.2.4 专用触摸显示屏
显示屏是系统管理操作人员与智能监控终端的交互接口,驾驶操作人员通过操作显示屏上的虚拟按键发送控制指令,同时接收相关信息,实现与后方管理控制中心的信息交互。
3 软件模块设计
3.1 车载终端软件设计
终端软件由主进程模块、卫星通信与处理模块、GPS/GPRS通信处理模块、车辆工况参数采集与处理模块等组成。软件采用结构化理念设计,图3所示为其运行流程图。
各个软件模块的主要功能及设计流程如下。
1)卫星数据处理模块。硬件电路设计中,UM220北斗定位接收模块与微控制器STM32的信号传输是通过UART2串行接口进行的,控制指令信号的刷新频率为1 s,CPU通过中断函数处理从UART2口线传送的数据。UM220模块发送给STM32的指令形式为NEMA制式,指令前缀为多个“MYM”字符串连接而成,指令的结合字符为“*”号。NEMA指令的前缀和结束符相同,而长度可变。车辆的经纬度、高度、速度和角度等定位信息指令格式为BDGGA和BDRMC,通过正确地存储和解析相应指令,即能获取所需的定位信息。
2)SIM900A通信模块。本地网或局域网最流行的通信协议即TCP/IP协议和UDP协议,通信模块内嵌的这两种协议可以完成数据的传输和接口识别,考虑到信息传输的稳定可靠,本文采用TCP/IP协议进行数据的交互。该模块同时提供了GPRS数据通信功能,满足了智能监控终端的通信需求。该模块与主控制器的通信采用串口模式,配置过程是通过CPU向模块发送AT操作指令来完成。系统启动并与管理中心完成连接、注册后,通过串口发送“AT+CIPSEND”指令完成双方的实时通信和数据传递。
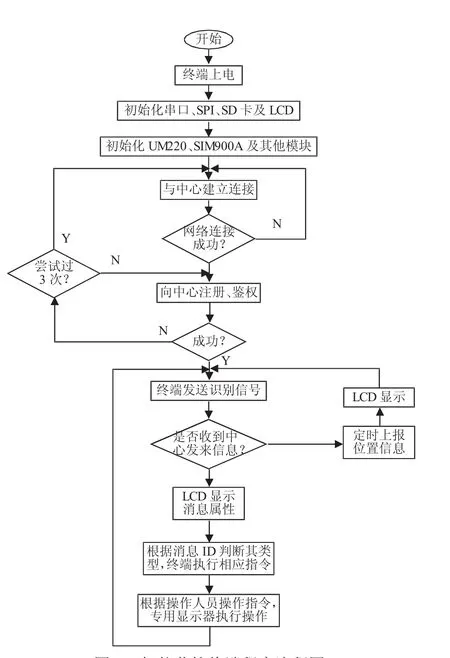
图3 智能监控终端程序流程图
3)终端验证与通信测试。当终端成功连接到管理控制中心时,服务器管理程序即与智能监控终端建立连接,实现实时通信与在线监控。从智能终端获取的定位数据、工况数据和其他信息可进行处理或存入后台数据库中。智能终端的主运行界面和故障自诊断服务界面如下页图4所示,其中图4-1为主界面,图4-2为故障自诊断界面。
通过控制管理中心服务器上运行的上位机监控程序,可以观察电子地图上通过终端定时上报的位置图标、位置参数、装备的工况参数和其他的控制信息,包括装备定位监控、实时工况监测、装备数据管理等。后方维护管理人员通过获取智能终端的数据,实现工程车辆的远程调度、管理与精确化保障。
4 结论
该车载智能数据监控终端基于ARM微控制器和模块化设计制作,通过与北斗定位模块、专用显示模块和通信模块的集成与协同,完成车辆的现场定位、通信、工况参数的采集与传输、车辆的实时监控等。对整个系统的设计充分考虑了低功耗、小体积、高可靠性和适应性等要素,能够在各种野外环境下可靠运行。现场测试也验证了该系统在定位、通信、采集和实时监控等方面的优良特性,证明该系统具有较好的适应性和推广应用前景。

图4 终端运行界面
参考文献
[1]崔培枝,姚巨坤,李超宇.基于信息流的装备维修备件精确保障模式与体系[J].设备管理与维修,2017(5):14-16.
[2]马丽芳.基于北斗和GPRS车载终端的设计与研究[D].西安:西安科技大学,2013.
[3]潘未庄,陈石平.采用北斗模块的车载监控终端设计与实现[J].电子测试,2013(16):45-47.
[4]韩月霞,李雄伟,张阳,等.基于物联网的物流车载终端系统设计与实现[J].传感器与微系统,2015,34(5):69-71.
[5]刘津,冯继新,曹有辉,等.基于CoDeSys的某工程车控制器软件设计[J].工兵装备研究,2015,34(3):14-180
[6]赵振宇,周新建,成文婧,等.提升信息化工程车辆质量方法研究[J].工兵装备研究,2017,36(2):8-10.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
初中生学习指导·中考版(2022年4期)2022-05-12
现代装饰(2020年8期)2020-08-24
铁道通信信号(2020年8期)2020-02-06
中学生数理化·中考版(2019年10期)2019-11-25
铁道通信信号(2019年9期)2019-11-25
汽车维修与保养(2019年3期)2019-06-19
电子制作(2019年24期)2019-02-23
电子制作(2018年17期)2018-09-28
铁道通信信号(2018年4期)2018-06-06
