
PMSM对拖系统再生能量利用研究
2018-05-14 14:49侯黎平王兵何孝祖
工业设计 2018年4期
关键词:永磁同步电机
侯黎平 王兵 何孝祖
摘 要:分析传统对拖测试平台的负载能量利用情况的基础上,搭建了一种直流互馈对拖测试系统,稳态运行时,负载回馈能量在两台电机循环利用,大大降低了能耗。对拖测试系统中的变工况能量造成直流母线电压的波动,采用超级电容和电阻混合控制处理不仅能够吸收被测PMSM减速制动回馈能量,还能稳定系统启动加速阶段造成的母线电压跌落,使系统安全高效的运行。
关键词:永磁同步电机;互馈对拖;超级电容;能量回收
传统的能量消耗型电机测试平台不仅电能消耗成本太高,而且不能满足大功率PMSM的城市道路工况测试要求。本文研究一种直流互馈的对拖交流传动测试平台能将负载PMSM再生发电能量回馈到直流母线,使回馈能量循环利用。这种基于电磁转矩方式的无功耗负载测试系统,大大降低了能耗[1-3]。
直流互馈对拖测试系统中被测PMSM模拟城市道路工况存在频繁起动、制动和加减速,变工况过程较大的瞬时能量会造成直流母线电压波动。当被测PMSM减速制动时,再生制动运行会向直流母线回馈瞬时能量,会造成直流母线电压快速泵升,若不及时处理不仅会危害开关嚣件和控制系统的安全,而且影响负载电机的加载和系统的能效。本文采用超级电容和电阻混合处理变工况的瞬时能量,搭建基于超级电容的对拖测试仿真平台,仿真结果验证了该系统方案的正确性和控制策略的可行性。
1对拖测试系统结构及控制原理
1.1 PMSM互馈对拖测试系统结构
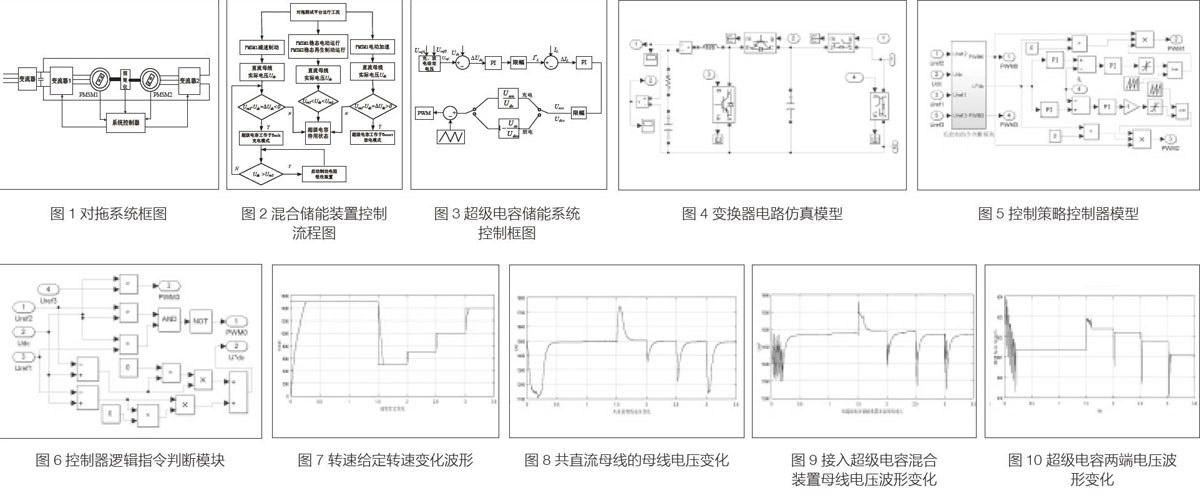
对拖测试平台也就是背靠背(back-to-back)试验系统,由一套三相交—直整流器组成的直流电源、两套变流器-PMSM以及系统控制器组成,两台PMSM通过机械联轴器背靠背同轴连接,如图P所示。由于被测电机系统和负载电机系统结构相同,所以能够互相模拟负载进行测试,这样就构成了“双变流器-PMSM”四象限串联能量互馈系统[4]。其核心通过机械和电气的耦合实现能量的循环,测试被测电机和控制系统的功能和性能。
1 2互馈对拖系统运行原理
根据图1,对拖双电机都采用采用ld=0转子磁场定向的矢量控制策略和SVPWM调制控制算法。两台PMSM同轴联结的结构,本文采用控制被测PMSM1工作于转速闭环,控制整个对拖系统的速度;负载PMSM2工作于转矩闭环,通过控制负载电机电磁转矩变化,来模拟被测PMSM1的负载大小,这样互馈对拖系统能够灵活的调节转矩和速度,完成各种工况试验功能测试需求[5]。
2超级电容和电阻混合储能系统控制策略
被测PMSM系统模拟道路工况运行时超级电容和电阻混合处理能量控制流程如图2所示。
超级电容储能系统在被测PMSM系统启动加速时补偿一定的直流母线跌落电压,其充、放电控制框图如图3所示。要实现储能系统和直流母线之间能量的双向流动,对双向DC-DC变换器采用基于小信号模型的状态空间平均法分析的电压、电流的双闭环控制策略,系统动态响应速度快、稳定范围宽[6-8]。
整个控制算法中,参考电压Ure1、Ure2分别为对拖测试系统中被测PMSM起动加速和减速制动时超级电容放电、充电给定电压域值。首先采集直流母线网压Ud,实时比较采集直流母线电压Ud反馈值同给定域值电压值Ure1,Ure2得到系统状态判定信号,输出相应的域值电压值作为系统的给定。判断储能系统的工作模式,若Uref2 然后通过给定域值电压和母线实际电压的反馈值Ud比较计算得到系统的输入电压信号△Ud,经过电压环P1控制器调节输出一个电流信号作为电流环给定值,给定值/L*同实际采集的电流IL反馈值比较,得到占空比控制电压给定信号△/L,经电压P1调节器调节得到电流内环输出的控制占空比D的充放电端电压Uscc和Udo,通过与三角波比较得到PWM触发脉冲,实现控制超级电容吸收或释放能量。 其中在双闭环控制系统中加入两个限幅控制器,电压环的输出限幅控制器能使充放电电流限制在允许范围内,保障超级电容和开关器件安全;电流内环限幅控制器维持占空比在一定范围,从而使超级电容两端电压限制在允许的工作范围内。 3对拖仿真模型及仿真结果分析 通过以上分析,搭建超级电容装置的双电机联合控制互馈对拖仿真测试平台。对拖测试系统中,超级电容和制动电阻混合储能系统仿真模型的主要参数,超级电容电压Uc为624V,容量C为121.9F,内阻为5.6mΩ,母线侧电容Cd为74.4μF,电感L为56mH,系统频率1KHz。 图4变换器仿真模型中Switchl为制动电阻控制开关,母线接近母线安全电压时触发导通,对拖系统稳态状况运行都是关断状态。Switch0为超级电容储能系统备用投入选择开关。当对拖系统稳态运行时Switch0开关关断状态即超级电容储能系统备用状态;系统大范围起动加速或制动减速过程Switch0导通,双向DC-DC变换器投入工作。 如图5混合储能装置的控制电路,分为控制逻辑指令判断模块和电压电流双闭环双向DC/DC触发信号控制模块其中PWMO为双向DC/DC投入备用触发信号;PWM3为制动电阻投放触发信号,PWM1、PWM2分别为IGBT1、IGBT2的触发信号,控制超级电容充放电。 如图6充放电控制控制指令判断是其中PWM3是制動电阻开关的触发信号,本文设置比较电压Uref3是1700V,PWMO是母线电压和Uref1、Uref2逻辑比较产生触发信号,本文设置Uref1、Uref2分为别1450V和1550V。 首先被测电机启动加速到1500r/min,1.5速度降到500r/min。接着连续的提速增量分别为200,300,400r/min。
由图7-10波形对比分析,当系统启动时需要很大的启动能量,造成直流母线电压跌落到1100V左右这时超级电容释放能量将直流母线电压抬升到设定电压值1400V左右。此时超级电容两端电压下降,当系统稳定后超级电容进入备用状态,此时超级电容电压基本稳定在一个变化不大的区间。
当1.5秒被测电机制动到速度降到500r/min这时由于一个较大的制动速度导致直流母线电压泵升到1700V此时超级电容进入储能状态吸收母线上回馈的瞬时能量,将母线电压降到设定1550V附近,减小了对系统的冲击。
2s、2.5s、3s时分别给电机不同的加速量,直流母线电压对应不同程度的波动。加速量越大,母线电压波动下降越程度大,则系统加速过程中需要的瞬时能量越大。通过对直流母线电压的分析,稳定运行时直流母线电压基本维持在1500V說明系统是稳定的。稳态运行时两台电机工作在电动和发电运行状态,实现能量的循环利用。
4总结
通过对PMSM互馈对拖控制的研究分析,搭建了互馈对拖仿真测试平台,仿真平台具有高效节能的功能,能把传统能耗型对拖测试平台负载阻力矩消耗掉的机械能量,回馈到直流母线上实现能量循环利用。超级电容模块充放电提供的瞬时能量,能够有效减小双电机起动时的巨大压降,吸收被测电机制动时回馈到母线的瞬时再生制动能量,有效减小泵升电压。这不仅提高了能量利用率,而且使直流母线电压稳定在一个安全运行的区间,增加了系统的安全。
参考文献
[1)李文勇.大功率交流传动能量互馈电力机车试验台[J],铁道机车与动车,2016,(01):41-46.
[2]刘家鑫.电力牵引传动系统仿真研究[D],大连交通大学,2012.
[3]Modeling and SimulationforCommon DC Bus Multi-motor Drive Systems Based on Ac-tivrty Cycle Diagrams.Li J,Tang t,wang T,et al.IEEE Intemational Symposiumon Industrial Electronics. 2010
[4]许迎杰,张全柱,邓永红.交流牵引传动能量互馈试验台的研究[J].内燃机车,2008,(06):48+55.
[5]胡文斌,刘少培,张胜洲,吴军基.电压解耦矢量控制交流牵引平台[J].电机与控制学报,2009,13(06):903-907,
[6]张秋瑞,葛宝明,毕大强.超级电容在地铁制动能量回收中的应用研究[J],电气化铁道,2012,23(2):40-43.
[7]边宏超.地铁牵引系统混合型再生制动能量吸收及利用方案的研究[D].成都:西南交通大学,2012.
[8]武利斌.基于超级电容器的城轨再生制动储能仿真研究[D].成都:西南交通大学,2011.
猜你喜欢
现代电子技术(2017年1期)2017-02-16
汽车工程学报(2016年5期)2017-01-16
计算技术与自动化(2016年4期)2017-01-11
电脑知识与技术(2016年13期)2016-06-29
科技视界(2016年12期)2016-05-25
电脑知识与技术(2016年2期)2016-03-22
电脑知识与技术(2016年1期)2016-03-22
哈尔滨理工大学学报(2015年6期)2016-02-18
哈尔滨理工大学学报(2015年3期)2015-09-21
科技与创新(2015年18期)2015-09-11
