某型船载无人直升机测控与信息传输系统设计
2018-05-10 05:10尚其龙包令聪
电子技术与软件工程 2018年24期
尚其龙 包令聪

摘要
测控与信息传输系统是无人直升机的关键技术之一,直接影响无人直升机性能等诸多方面,进而影响无人直升机的应用范围。本文针对某型船载无人直升机设计了一套测控系统,主要实现对无人直升机及机载任务载荷的遥控、遥测数据的实时传输,其主要功能有:遥控遥测数据传输、任务载荷信息传输、无人机飞行线路跟踪、链路状态监控等。
【关键词】无人直升机 测控与信息传输系统
1前言
无人直升机具备垂直起降能力,可以在地面、舰船上灵活垂直起飞或者降落,不需要专用跑道、弹射器、发射架等设备进行起飞或发射,且起飞和降落所占用的空间小;可以在目标上空长时间悬停,便于精确观察和任务执行;能够朝任意方向飞行,具有较强的机动灵活性。无人直升机的上述特点特别适合于船载使用。
测控与信息传输系统(下文简称测控系统)是无人直升机的关键系统之一,直接影响无人直升机的飞行距离、姿态控制、飞行稳定性、任務载荷信息传输性能等诸多方面,进而影响无人直升机的应用范围。
本文针对某型船载无人直升机设计了一套测控系统,主要实现对无人直升机及机载任务载荷的遥控、遥测数据的实时传输,其主要功能有:遥控遥测数据传输、任务载荷信息传输、无人机飞行线路跟踪、链路状态监控等。
2系统组成
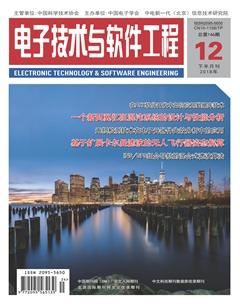
测控系统包括机载和地面部分,系统组成如图1所示。系统主要由互为热备份的主通道、副通道,以及链路监视控制与无人机跟踪计算单元三个部分组成。
C波段高速收发信机组成主通道,主要负责传送高清或标清图像信号、测控信号、任务控制信号和差分GPS信号,同时还要定时插入来自无人机(机载)跟踪信号发生器产生的无人机跟踪信号。UHF数传电台组成副通道,主要负责与主通道同传测控信号、任务控制信号和差分GPS信号,以防C波段信号丢失后无人直升机失控。
链路监视控制与无人机跟踪计算单元主要负责监视当前在用测控信道的信号质量,当发现通信质量下降时实施主备信道切换,以保证无人直升机测控指令可靠传输;同时还要负责测量计算无人机距离,结合船向信号和船摇信号,计算天线跟踪误差信号,保证天线方位角始终对准无人直升机。
船载天线伺服跟踪系统主要负责保持C波段定向天线始终对准无人直升机,利用装在天线支架机械结构中的俯仰陀螺、方位陀螺和横滚陀螺三个电陀螺的电信号,保证在未对天线指向作调整时,消除船向、船摇的影响,维持天线指向不变;同时根据天线方位误差控制信号,对天线方位角进行调整,根据GPS信号,在C波段全向天线向C波段定向天线切换时,设置天线跟踪的初始值。
天线切换控制器负责全向天线和定向天线之间的切换,切换方式可以设置自动或手动切换。
3系统总体方案设计
3.1机载
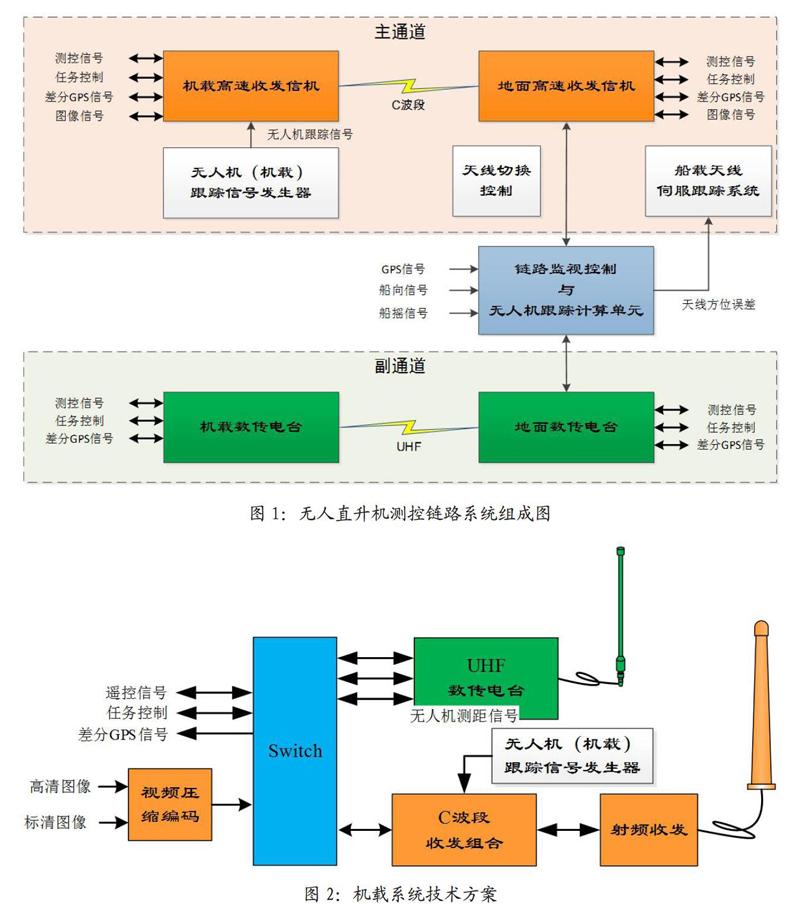
机载系统技术方案如图2所示。机载数传电台和机载高速收发信机在测控数据收发上互为备份,以保证飞控指令和任务控制指令的可靠性。
为保证飞控、任务等指令和信号的可靠传输,飞控、任务等指令和信号实施UHF频段与C波段同传。地面系统分别用这两个频段同时发送测控、任务和差分GPS信号,机载系统同时在这两个不同频段接收这些信号,当2路接收信号都通过了差错校验(如奇偶校验、CRC循环冗余校验等),则Switch矩阵保持原来状态,输出其中任意一路信号;如果只有其中的一路接收信号通过了差错校验,则Switch矩阵输出正确的那路信号,丢弃错误信号;如果2路信号都没有通过差错校验,则全部丢弃,此时没有信号输出。
无人机(机载)跟踪信号发生器则在收到地面测距指令后,立刻产生无人机跟踪信号,插入到调制解调器中,通过C波段传送至地面,以便地面计算无人直升机距离和船载天线指向误差。
3.2地面
地面系统技术方案如图3所示,测控信号传输采用C波段与UHF波段同传,互为备份,工作方式与机载系统相同。下行图像信号与其中一路下行测控应答信号同在C波段利用高速收发信机下行通道传输,由于2个频段的衰落特性和受干扰情况相互独立,2路测控信号同时受到深度衰落或干扰的概率非常低,可以保证测控信号可靠传输。
为配合机载测控系统,地面控制系统同时利用2套上行传输设备(分别工作于C波段和UHF频段),向无人直升机发送测控、任务和差分GPS信号,确保飞控、任务指令和差分GPS信号的可靠传达直升机。地面系统接收到来自C波段和UHF频段的测控信号后,同样先进行差错校验,只输出其中的正确信号,丢弃差错信号,保证无人直升机应答信号的正确接收。
链路监视控制与无人机跟踪计算单元主要由计算机、方位误差检测设备、距离计算软件等相关接口和硬件、软件组成。一方面,实现测控信号传输质量监视;另一方面,根据接收到的无人直升机上的GPS位置信号和无人机跟踪信号,训练无人机跟踪算法程序。
船载天线伺服跟踪系统是保证C波段定向天线指向无人直升机的机电系统,利用陀螺输出信号,克服船向变化和船体摇动等对天线指向的影响,同时根据链路监视控制与无人机跟踪计算单元输出的误差信号实现天线的方位调整。
船载天线稳定跟踪系统是一个集稳定和伺服功能于一体,并能实现自动对准、稳定跟踪目标的双向移动通信天线系统。天线稳定控制系统是一个两轴伺服系统,整个天线安装在一个固定的底座上,底座安装在甲板上,与船面甲板平行。为减轻载体振动对系统的影响,在安装时天线底座与载体之间以减震圈相隔。本伺服系统有二类外部信号来源,一是舰船驾驶系统送来的方位、俯仰、横摇信号,另一个是GPS系统送来的位置信号。
4跟踪定位算法
在本系统中,无人机GPS信号丢失前,无人机跟踪信号与无人机上的GPS单位数据同时传向地面,用于对无人机跟踪定位算法训练,纠正和排除算法产生的模糊结论,估计计算误差。
4.1测距
本方案采用伪码测距算法的基本原理对无人直升机实施距离测量,首先,地面测控向无人直升机发出测距指令,无人直升机收到该指令后,向机上无人机(机载)跟踪信号发生器输出一触发信号,无人机(机载)跟踪信号发生器产生无人机跟踪信号,并在C波段中实施信号混合,经C波段机载天线发向地面;在地面,利用接收到的伪码与本地伪码进行对比,获得码相位,并由此获得测距指令发出到接收到测距伪码的时间差,换算成无人直升机的距离。当无人直升机上的GPS信号可用时,则利用由机上GPS信号和船上GPS信号获得的机船精确距离,对测距算法的误差校正程序实施校正训练,不断修正测距误差。当机上GPS信号丢失时,测距算法程序则利用训练获得的误差校正值,对计算结果进行修正,以此提高测量精度。
4.2测向
天线指向误差提取电路如图4所示,由两路参数完全相同的接收电路组成。来自天线的二路信号经放大和下变频至一合适的频率,然后经ADC采样后变成数字信号。
影响指向测量精度的因素主要有接收机噪声、信号振幅起伏、伺服系统噪声和多径传播等,其中接收机噪声是影响测量精度的主要因素。
5结束语
本文设计了一套船载无人直升机测控与信息传输系统,根据船载和无人直升机的特点进行了双链路互为热备份的总体方案设计,无人直升机跟踪定位算法设计和测向、测距的误差分析,实际工程实践中应用上述方案取得了良好效果。
参考文献
[1]王鹏.无人直升机发展现状及技术难点[J].计算机产品与流通,2018 (01).
[2]李秋生,于志刚,阳朱华,小型无人直升机的飞行控制系统[J].电子技术与软件工程,2017 (07).
[3]门金柱,王建国.美军航母舰载无人机发展目标的调整及分析[J].飞航导弹,2016 (12).
[4]王晓剑,潘顺良,宋子善,沈为群.无人直升机自主着舰的计算机视觉技术[J].北京航空航天大学学报,2007 (06).
猜你喜欢
科学(2020年3期)2020-01-06
电子测试(2018年22期)2018-12-19
电子制作(2017年7期)2017-06-05
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
高师理科学刊(2016年8期)2016-06-15
西藏科技(2015年4期)2015-09-26
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
电子设计工程(2015年3期)2015-02-27
太空探索(2014年1期)2014-07-10