
基于STC单片机的多功能报警器的设计
2018-05-08 13:20董福香
电子技术与软件工程 2018年22期
关键词:传感器
董福香
摘要 伴随着社会经济快速进步,我国市场经济不断发展,人们的平均生活水平也随之明显提高,而汽车也演变成了日常出行的重要交通工具。而汽车的行驶速度与行车安全、运输效率密切相关,就相关资料显示,在发生重大交通事故的时候,大约有2/5是因为驾驶员超速行驶所导致的。据此,本文为了确保行车安全做了一项设计,基于驾驶员自身的安全,进行检测车辆超速的报警系统设计。报警系统允许驾驶员通过自带按键设置车辆的安全行驶最高速。在车辆行驶过程中,报警系统利用速度传感器对车辆的行驶速度进行实时监控,并根据所设置的安全参数进行对比分析,一旦发现车辆超出安全参数,蜂鸣器即可便开始报警,警告灯也一直处于闪烁状态,直到驾驶员减速,以此从根本上确保行车安全。此外,本设计在超速报警的功能上还增加了其它功能,比如温度显示、时间显示、闹钟等功能。
【关键词】STC单片机 传感器 超速报警
1 前言
在汽车工业和高速公路建设不断优化发展的进程中,由于交通事故所造成的人员伤亡数量并未有所缓解,还在很大程度上导致了严重的经济损失。就统计显示,导致交通事故的原因主要是车辆超载与超速行驶,其中超速行驶存在较大的随机性,控制难度较大,再加上我国地质复杂,公路条件繁琐,各种等级公路所允许的最高速存在一定差异,既有限速装置根本无法适应目前这种现状。因此,开发具备智能决策模块的汽车行驶速度报警控制系统势在必行。
2 工作原理
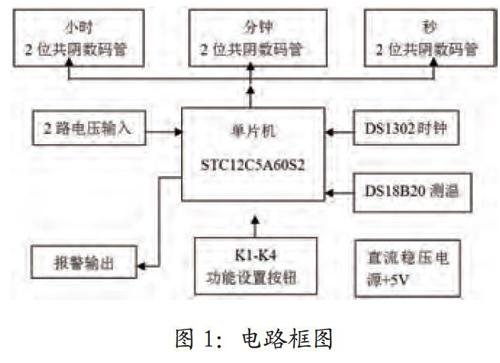
为了保障行车安全,基于驾驶员自身安全,设计了可以对车辆行驶速度进行检测的报警系统。此报警系统允许驾驶员利用自带按键,进行车辆安全行驶的最高速度进行合理设置,在车辆行驶过程中,报警系统通过传感器,对机动车辆的行车速度进行全过程监测,并和驾驶员设置的安全参数做对比,如果发现车辆速度超出安全参数最高值的时候,蜂鸣器开始报警,警告灯开始闪烁,以此警示驾驶员,适当降低行驶速度,确保行车足够安全。同时,本设计中还可以实时显示时间以及显示当前车内的温度。
2.1 电路框图
如图1所示。
2.2 各模块电路原理
2.2.1 报警原理
当测量数据超过预设值或电路工作异常时,单片机驱动蜂鸣器发出IKHz讯响,同时LED2红色灯亮。
2.2.2 显示原理
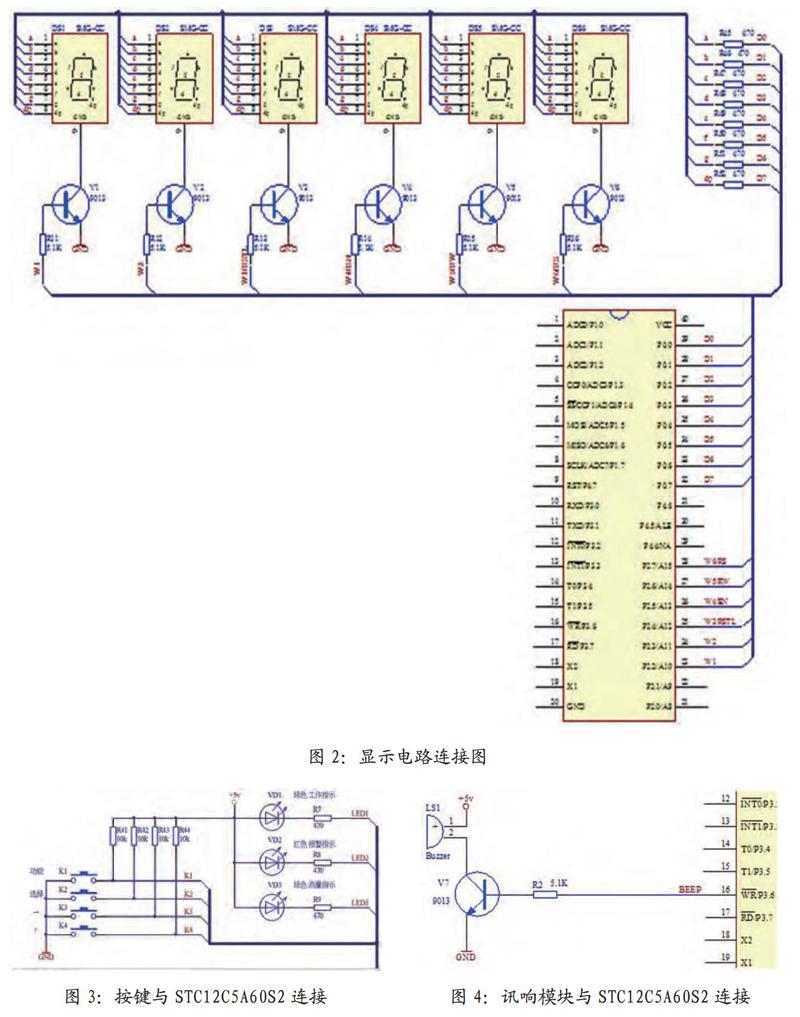
显示部分采用6个1位共阴红色数码管,位驱动采用NPN型三极管驱动,占用P2.2-P2.7端口,采用动态扫描方式。段码为DO-D7,占用PO的8个端口,端口配置为推挽输出,所以无需上拉电阻,数码管各端口配有限流电阻。
2.2.3 按键原理
按键K1-K4采用独立按键的方式,当按键按下时,单片机的相应的端口由高电平变为低电平,单片机得到键值进入相应的程序处理。
2.2.4 讯响电路原理
所谓讯响电路主要包含两大组成部分,即源蜂鸣器与PNP型三极管。讯响电路的工作原理是在PNP型三极管导通之后,源蜂鸣器及时发出定频声音。而驱动主要利用独立端口驱动的方式,占据P3.6端口。
2.2.5 测温原理
DS18820与单片机通信进行数字测温,R3是上拉电阻,不接电路不能工作。
2.2.6 实时时钟原理
DS1302芯片产生精确的实时时钟,然后把数据传递给单片机驱动数码管显示。
3 系统硬件设计
3.1 显示电路的设计
显示电路由NPN型三极管和六个共阴极数码管共同完成。每个NPN型三极管可驱动一个共阴极数码管。DIG7-DIGO:八位数值驱动线。输出位选信号从LED的公共阴极中吸收电流,以及显示器共阴极电流的位驱动线,最大值几乎可以高达500mA,而处于关闭状态的时候,输出+VCC。如图2所示。
3.2 按键电路的设计
该系统的按键电路由四个开关加上拉电阻构成,并且与LED报警指示二极管相连接。四个开关则分别对应着K1功能键、K2选择键、K3数值减、K4数值加等功能,以操作开关的方式,设定速度的上限,而且还具备增加或减小速度的按鍵,便于以驾驶员的实时实地需求为依据,变更速度,以此实现报警目的,同时操作的灵活性也十分突出。
每按一次Kl键,可在下面几个功能模式中连续循环转换-a:时钟及调整模式(数码管不显示a),b:测量温度模式,C:测量电源电压模式,d:报警模式。注意:长按按键可以快速连续调整。如图3所示。
3.3 报警电路的设计
报警模块所负责的主要部分是声音报警,电路都相对简捷,声音报警主要是由单片机引脚与拉电阻相连接,以及晶体管、蜂鸣器所构成的。如图4所示。
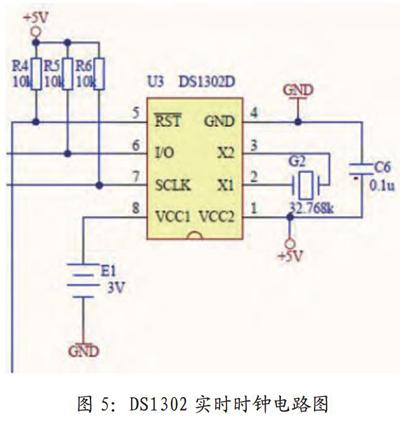
3.4 时钟电路的设计
单片机运转的时间基准与其工作速度密切相关。时钟电路就是所谓的振荡电路,为单片机提供正弦波信号,以此作为时间基准,从而对单片机的执行运转速度起着决定性作用。本文用的是DS1302实时时钟芯片。
原理:DS1302芯片产生精确的实时时钟,然后把数据传递给单片机驱动数码管显示,R4、R5、R6是3个上拉电阻。上电后即显示时分秒。按K2键“时”闪烁,此时按K3键闪烁的小时数字减1;按K4键闪烁的小时数字加1。再按K2键”分“闪烁,再按K2键“秒”闪烁,“分”“秒”的调整与上相同,再按K2键数码管不闪烁,退出调整状态。
闹铃模式:当时钟的时和分和设定值一致时,闹铃响。如图5所示。
3.5 测温电路的设计
测温原理:DS18820与单片机通信进行数字测温,R3是上拉电阻,不接电路不能工作。按K1进入测温模式,数码管首位显示c,后四位显示当前温度,显示格式为xx.xx。如图6所示。
4 系统软件设计
4.1 系统流程图
汽车超速报警器的设计流程如图7所示。软件编程利用C语言,单片机的T1为定时器,定时时间是Is。TO定时时间设置成50ms,到了时间,溢出便及时停止。在停止服务程序的时候,中断次数寄存器添加l,重复定时中斷20次,时间是Is。时间一到,及时获取定时器T1输入的脉冲数,即实时行车速度的频率。对比分析频率与单片机内部设定阂值,以此对行车速度是否超速进行判断。
主程序具备硬件初始化、子程序调用、报警等相关功能。数据处理子程序主要是对行驶速度进行监测,就是对车辆时速进行计算,以此为报警子程序提供参数依据。按键终端子程序功能是输入正确的、合法的参数信息。报警子程序则在超速行驶时,及时发出警报。显示子程序设计主要利用数字化,将驾驶员设置的最高速度和车辆实际速度显示出来,通过NPN型三极管促使LED实时展示。
4.2 主程序
系统的组成单元非常繁杂,为了方便更改,应采取模块化分层管理模式。在主程序中,主要包括单片机初始化、显示测量速度、地址传入模块、显示设定速度、报警等部分。如图8所示。
测速程序:
//Dis Speed0;
LED2-1;
LED3-I;
if(Key Val--Ox30)//key34set
{
if(++Set times>-3)
{Set times=0;
)
)
else if(Key Val--OxlO)//key3-
{
if(Set times--l)
{if(--speed Max--O)speed Max-1 27;}
else if(Set times--2)
{if(--speed Min--O)speed Min-80;}
)
else if(Key Val--Ox20)//key4+
{
if(Set times-l)
{if(++speed Max--12 8)speed Max-81;)
Else if(Set times--2)
{if(++speed Min-80)speed Min-0;)
)
)
报警程序:
main0
{
TimerOlnit0;
POMO-Oxff;
PO-Ox00;
PIMI-Oxl0;
P3MO-Ox40; //P3 6输出
P3-Ox3f;
ITO-1:
EXO-I;//enableINTOinterrupt
EA-1:
while(l)
{
if(flag2ms)
{ flag2ms-O;count2ms-O;Key3Process STCO;)
Beep Di0;
DisplayLed20;
}
参考文献
[1]张俊谟.单片机的发展与应用[J].电子制作,2007 (08):31.
[2]周旭艳,彭宣戈,朱兵.8051在车辆超速报警系统中的应用[J].井冈山学院学报,2006 (07).
[3]任国峰,李军伟,张雨.单片机在发动机转速测量中的应用[J],汽车科技,2006 (01):38-40.
[4]魏勋.单片机车速数显及报警系统设计[J].电子制作,2007 (12).
猜你喜欢
学苑创造·A版(2023年6期)2023-06-16
云南化工(2021年8期)2021-12-21
纺织科学研究(2021年1期)2021-12-03
舰船科学技术(2021年12期)2021-03-29
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
电子制作(2019年7期)2019-04-25
时代英语·高一(2019年1期)2019-03-13
电子制作(2018年9期)2018-08-04
电子测试(2017年11期)2017-12-15
