
电动/混合动力汽车的CAN网络系统
2018-05-08 13:20周定华付贝贝
电子技术与软件工程 2018年22期
周定华 付贝贝
摘要 为了减少通信设备、线束、插件,简化线路,降低成本,提高电动/混合动力汽车通讯的实时性、可靠性和应急处理能力,本文介绍了电动/混合动力汽车的CAN网络系统,系统包括CAN总线拓扑结构和多个电子控制单元,将电动/混合动力汽车上的多个电子控制单元集成起来放在一条高速CAN总线网络上,实现了分布网络式控制系统,保证了通讯的可靠性和实时性。
【关键词】电动/混合动力汽车 CAN网络系统 拓扑结构
当今世界,开发新一代电动汽车和混合动力汽车成为时代潮流。电动及混合动力汽车相对常规汽车来说,结构更为复杂,工作环境更恶劣,整车上搭载了许多电子控制单元(ECU),在常规汽车基础上加入了电机控制系统、电池管理系统、电池均衡器等等,因此需要实时传输的数据很多,且各控制单元的控制周期不同,数据转换速度、各控制命令优先级也不同,集成如此多的ECU及其附带的通信设备必然会使整车电路繁琐复杂,线束多,重量大,成本高。这对电动/混合动力汽车的通信系统提出了较高的要求。
良好的通讯系统是实现电动及混合动力汽车可靠运行的关键。CAN(Controller AreaNetwork)总线是一种有效支持分布式控制的串行通讯网络,具有很强的容错能力和快速处理能力,有良好的可靠性、实时性及高传输速率,满足电动/混合动力汽车网络系统的需求。为此,本文介绍了电动/混合动力汽车的CAN网络系统,合理分配了电动汽车及混合动力汽车各控制器节点的连接结构,通过CAN总线实现各种数据的信息共享,从而实现整车的各种控制功能,同时增强了整个系统的安全性和稳定性。
1 CAN总线
CAN (Controller Area Network控制器局域网)是由德国著名BOSCH企业自主设计的一种串行数据通讯协议,以此完善车内电子控制单元的数据交换,其主要特点:
(1) CAN总线采用独特的非破坏性总线仲裁技术,优先级高的节点优先传送数据,能满足实时性要求;
(2) CAN总线为多主站总线,各节点均可在任意时刻主动向网络上的其它节点发送信息,不分主从,通信灵活;
(3) CAN总线上每帧有效字节数最多为8个,并有CRC及其它校验措施,数据出错率极低,万一某一节点出现严重错误,可自动脱离总线,总线上的其它操作不受影响;
(4) CAN总线只有两根导线,系统扩充时,可直接将新节点挂在总线上即可,系统扩充容易,改型灵活;
(5) CAN总线传输速度快,在传输距离小于40m时,最大传输速率可达lMb/s。正是由于CAN总线具有这些其它通信方式无法比拟的优点,使之成为电动汽车和混合动力汽车控制系统的理想总线。
本文提出的一种电动/混合动力汽车的CAN网络系统,采用CAN总线型拓扑结构,通过一条高速CAN连接起多个电子控制单元,形成高速CAN通讯网络,各节点之间通过CAN总线实现数据信息共享。下面分别具体地阐述电动汽车和混合动力汽车的功能实现及其网络架构。
2 电动汽车中CAN网络
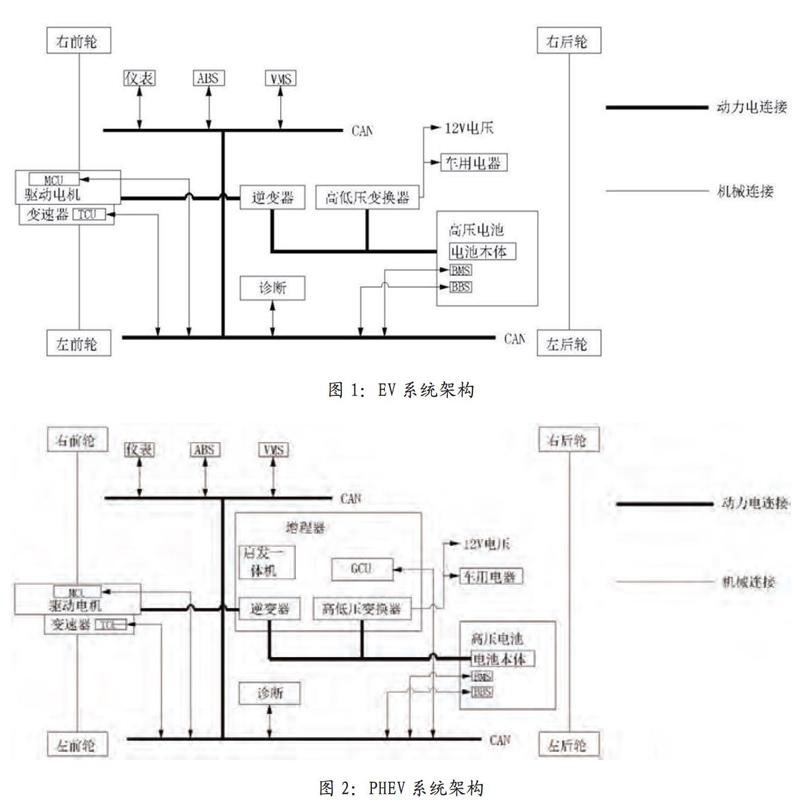
电动汽车EV(Electronic Vehicle)作为纯电动汽车,以高压电池包作为动力来源,带动电机驱动汽车行驶,其主要控制单元包括整车控制器(VMS)、电池管理系统(BMS)、电池均衡系统(BBS)、电机控制系统(MCU)、充电器(CM)以及组合仪表(ICM)、空调(CLM)等常规汽车上的控制器,各控制单元通过CAN总线进行通讯。EV系统架构如图1所示,图中还有变速器(TCU)和防抱死控制系统(ABS)。VMS是整车的控制枢纽,对整车各控制器及车辆行驶状态进行监测和控制,保障车辆安全正常行驶。BMS、BBS是电动汽车的电池管理系统,是整车能源供应的保障,用于监测电池组的运行参数、预测电池的荷电状态(sOc)、根据电池状态控制电池充放电、保持电池系统处于合适工作的温度范围、与整车多能源总成控制系统进行实时通讯、保障电池组安全、保障电池各单体充放电的一致性。MCU是电动汽车的驱动电机控制器,监测驱动电机的工作状态,控制电机运转动作,保障电机驱动整车正常行驶。CM作为汽车与充电站或普通家用220V电的接口,目前有普通充电器和快速充电器两种类型,实现电动汽车常规和快速充电需求,普通充电器可以接家用220V电源进行充电,快速充电器要到专门的充电站进行充电。
3 混合动力汽车中CAN网络
混合动力汽车分为串联式混合动力汽车和并联式混合动力汽车。
PHEV(Plug-in Hybrid ElectronicVehicle)--插电式混合动力汽车属于串联式,其电子控制单元包括整车控制器(VMS)、电池管理系统(BMS)、电池均衡系统(BBS)、电机控制系统(MCU)、充电器(CM),组合仪表(ICM)和增程器控制系统(GCU)。PHEV在EV的基础上增加一个增程器,以解决纯电动汽车行驶里程短不能及时充电的问题,增加续航里程。此混合动力汽车只能由电机进行驱动,燃油发动机仅仅用于发电并给高压电池充电,当电量不足时发动机启动发电,给高压电池包充电,电池包输送电力给电机,以驱动整车行驶,最终保障汽车有足够的续航能力到达充电地点进行下一次充电。PHEV系统架构如图2所示。
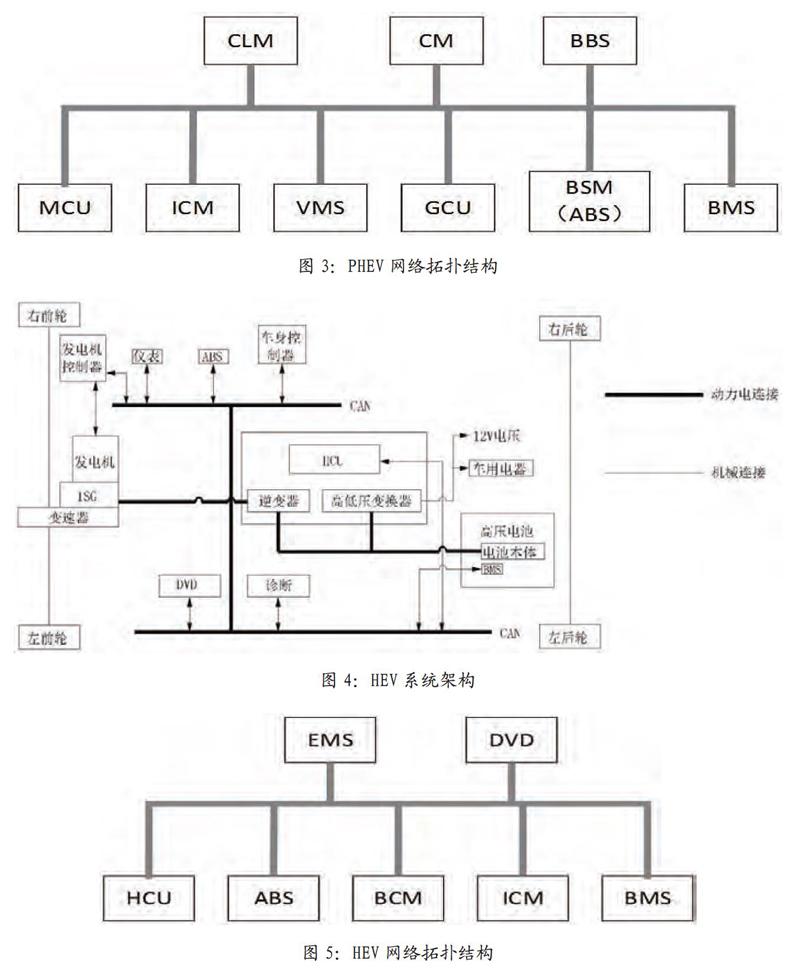
PHEV拓扑结构中主要包括VMS、MCU、BMS、BBS、CM、GCU,以及ICM、ABS、CLM等,CAN速率为500kbit/s,PHEV网络拓扑结构如图3所示。在运行中,CAN消息的传递,VMS发送给ICM显示档位、系统故障、电池电量、续航里程等信息;VMS发送给MCU,进行扭矩和转速请求,以及电机状态请求等;VMS发送给BMS,反馈电池电量及电池状态,以及校驗;VMS发送给空调,报告发电机工作状态及发出空调使能信号;MCU发送给VMS和仪表,报告电机最大可输出扭矩、转速,以及实际转速等信息;MCU发送给VMS,报告直流母线电压、电流,以及电机故障等信息;BMS发送给VMS,报告电池包各项参数;BMS发送给BBS.实现单体监测;BMS发送给CM,BMS的充电请求信息;BBS 1、CM 1分别实现BBS、CM对BMS的请求的反馈。
与PHEV不同,并联式混合动力汽车HEV(Hybrid Electronic Vehicle)可以单独使用发动机做动力源,也可以同时使用发动机和电动机做动力源来驱动汽车。HEV电控单元包括整车控制器(VMS)、电池管理系统(BMS)、电池均衡系统(BBS)、电机控制系统(MCU)、充电器(CM)、组合仪表(ICM)和动力管理系统(HCU),以及一个高压动力电池包。相比常规汽车,HEV增加一套动力管理系统HCU,以及一个高压动力电池包。在汽车怠速、起步和中低速行驶时,发动机停机,只需电机驱动,依靠高压动力电池使电机驱动整车行驶常规速度行驶时,电机驱动力不足,电机带动发动机启动,依靠发动机的动力驱动汽车,同时多余部分动力用于给电池充电;大负载和急加速时,电机启动,配合发动机工作,使发动机处于最佳工况工作,给汽车提供足够的动力;制动时,动能回收给电池充电,减少能量损失;电池电量不足时,发动机自动启动,驱动汽车行驶并給电池充电。高电压的动力电池包和高效的启发一体式电机(ISG)的引入.有效降低了排放,实现了汽车的低排放和燃油经济性。PEV系统架构如图4所示。
HEV拓扑结构中主要包括EMS(发动机管理系统)、HCU、BMS、BCM、ICM、ABS等,CAN速率为500kbit/s,HEV网络拓扑结构如图5所示。EMS发送给HCU,报告发动机最大和最小扭矩;EMS发送给HCU和ICM,报告发动机水温、电控故障、瞬时油耗、怠速参考速度等;EMS发送给HCU、ICM和DVD,报告点火开关档位、节气门位置、怠速指示、加速踏板机械位置及故障、发动机扭矩相关指示、车速水温等传感器失效、MIL等信号等;EMS发送给HCU,驾驶员扭矩请求、摩擦扭矩、基准扭矩、实际扭矩等;预留的发动机汽缸数、空气感应类型、燃油类型等信号;HCU发给EMS,对发动机各种状态进行请求;HCU发给仪表和DVD,对混合动力系统的各种工作状态进行显示;HCU发给BMS,反馈电池所需要的各种整车状态和反馈系统时间;BMS发送给HCU,最大充电电流和最大放电电流,最大电池电压、最小电池电压、电池电量和健康指数、校验等,电池电压电流、直流母线电压、平均电池温度、校验等,电池最高电压、最低电压、最高温度、最低温度等,电池准备状态、报警指示、正负极连接状态、预充状态、充电状态等,各种报警信号和状态信号。由于HEV动力电池没有EV动力电池容量大,主要靠发动机充电,因此,目前奇瑞HEV车型没有设置外部充电接口。
4 总结
本文简要的介绍了电动汽车和混合动力汽车的系统架构,并设计了相应的CAN网络拓扑结构,优化了各控制模块之间通讯成本和通讯实效性的问题,使电动汽车和混合动力汽车性能更稳定,功能扩展更方便,智能化程度更高。本文设计的电动/混合动力汽车的CAN网络系统为电动/混合动力汽车通信网络的研究提供了一种简单有效的低成本方案。
参考文献
[1]钱三平,黄少堂,混合电动汽车CAN网络系统设计及应用[J].汽车工程学报,2014,4 (02): 109-115.
[2]刘龙龙,杨正林,盖福祥,深度混合动力汽车CAN网络设计及研究[J].机械设计与制造,2015 (01):35-38.
[3]贾爱芹,闰志国.CAN总线在汽车上的应用探讨[J].南方农机,2018, 49 (13): 194+199.
猜你喜欢
小读者(2021年2期)2021-03-29
汽车观察(2018年10期)2018-11-06
车迷(2017年10期)2018-01-18
北京汽车(2017年3期)2017-10-14
汽车工程学报(2016年5期)2017-01-16
山东工业技术(2016年24期)2017-01-12
汽车工程学报(2016年6期)2017-01-11
现代电子技术(2015年22期)2015-12-02
