基于人眼视觉感知驱动的井下图像增强算法
2018-05-08 07:52王亚恒
计算机工程与应用 2018年9期
王 焱,杨 威,王亚恒
WANG Yan,YANG Wei,WANG Yaheng
辽宁工程技术大学 电气与控制工程学院,辽宁 葫芦岛 125105
School of Electrical and Control Engineering,Liaoning Technical University,Huludao,Liaoning 125105,China
1 引言
煤矿井下环境具有空间狭窄、风大潮湿、空气污浊、全天候人工照明、光照不均匀的特点,导致井下图像光场不均匀、整体灰度值偏低、动态范围大、阴影区和高光区细节难以辨认,对图像识别和处理带来相当的难度[1-2]。
针对煤矿井下图像增强的研究,李文峰等[3]提出一种基于小波阈值去噪和直方图均衡相结合的图像增强算法,先利用小波变换法分离出图像噪声信号,再使用直方图均衡化对图像进行全局对比度调整;刘毅等[4]提出一种基于同态滤波原理的井下图像处理方法:先采用低通滤波函数抑制图像低频分量,再采用高通滤波函数增强高频分量,之后对图像低频分量部分进行细化处理,对不同低频分量采用不同的处理策略;程德强等[5]结合引导滤波对图像进行照度估计,再采用单尺度Retinex算法提高图像暗区对比度;朱立新、王平安等[6]提出一种面向彩色图像的梯度域调整方法,首先对图像梯度场进行直方图均衡化,再利用最小二乘原理重建出增强后的图像,算法比较复杂。
本文以井下低照度图像为研究对象,设计了一种基于人眼视觉感知原理的井下图像对比度增强算法。该算法根据人眼在不同视觉区域的对比度感知特性对图像进行划分并各自进行亮度校正,并用校正结果重构图像。实验结果显示,该方法能够很好地保护图像细节信息,有效地增强图像对比度,提高井下图像质量。
2 人眼视觉感知特性
韦伯定律是德国实验生理学家韦伯在1831年研究人类能感受最小刺激变化时提出的理论,韦伯发现,同一刺激差别量必须达到一定比例,才能引起差别感觉,这一比例是常数,用公式表示为:

式中,I表示某一种刺激量的初始值,ΔI表示刺激的最小可察觉差别量(Just Noticeable Difference,JND),k为常数,称为韦伯分数或韦伯比,公式(1)称为韦伯定律(Weber’s Law)。韦伯定律量化了人类感觉系统的JND:JND与刺激量的初始值I成正比,I值越大,JND越大。
人眼视觉系统可以由人眼对灰度图像的分辨能力进行描述,这是它的一个主要特性。将韦伯定律应用于人眼亮度感知上,可得到公式(2):

式中,B表示图像背景亮度,ΔBT表示在该背景亮度下对应的JND。根据公式(2)的表述,可以总结为:在图像平均亮度越大的地方,JND越大。在一个相当宽的范围内,k值可视为常数,当亮度很高或很低时,k值明显升高。心理物理学中将JND随背景变化而变化的现象称为人眼亮度掩蔽特性,并根据此特性将一幅图像分为4个区域,如图1所示[7-8]。
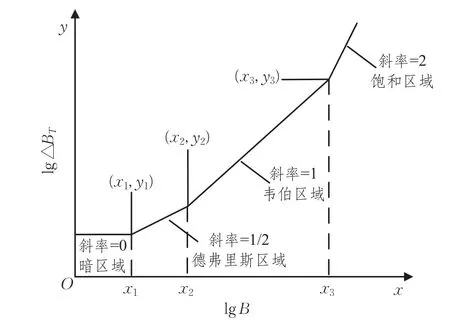
图1 基于人眼掩蔽特性的图像区域划分
图1中,根据韦伯分数(即曲线斜率)可将曲线分为4个区域:斜率约为1/2的区域称为德弗里斯区域(Devries-Rose region),对应于图像的低等照度区域;中间段曲线斜率为1区域为韦伯区域(Weber region),是一个刺激强度不大就可以明显感觉有差别的区域,对应于图像的中等照度区域;图像的高照度区域定义为饱和区域(Saturation region),是受刺激饱和影响的区域,该区域斜率通常大于1;剩余部分区域就是低对比度区域,在此区域人眼难以感觉到光照变化。
根据这种划分,可将一幅图像看做成暗区域、德弗里斯区域、韦伯区域和饱和区域的组合。其中德弗里斯区域对应图像中因亮度过暗,人眼能够识别但不能够准确获取图像细节信息的部分(图2(b));韦伯区域对应图像中能够正常、直观地反映图像信息,人眼能够轻易觉察图像细节的部分(图2(c));饱和区域对应因过亮导致人眼不能准确获取图像细节信息的图像区域(图2(d));而暗区域对应图像中因亮度过低,人眼完全不能获取信息的部分。由此可见,图像中韦伯区域面积越大,图像细节信息展现越清晰,图像视觉效果越好。一幅图像的不同区域划分如图2所示。
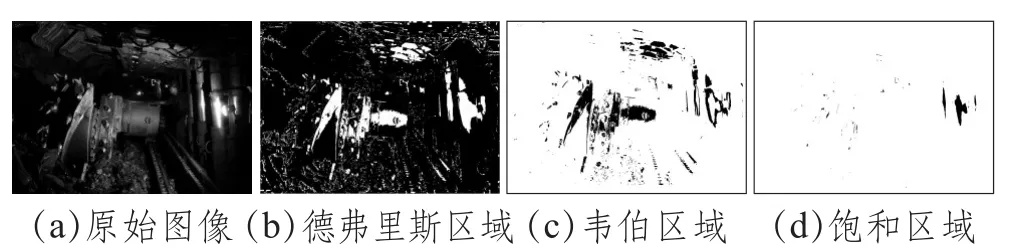
图2 图像不同区域划分
根据图1曲线,得到图像中不同区域最小可觉差ΔBT与背景亮度B的分段关系式[9-10]:
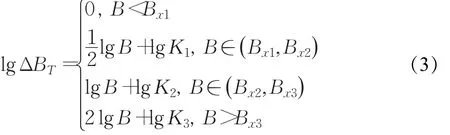
式中,Bx1、Bx2、Bx3对应图1中不同区域分界处的背景亮度,K1、K2、K3为常数。图像的动态范围BW定义为灰度最大值与灰度最小值的差值,即,在图1中,各区域分界点处背景亮度可由下式表示:

其中,0≤α1≤α2≤α3<1,通常将α1设置为0,通过实验发现,以大约3∶4∶3的划分比例进行德弗里斯区域、韦伯区域和饱和区域的划分时,图像能取得较好的增强效果,故本文中α2、α3的值分别设置为0.3和0.7,实验结果表明,这组参数对大部分井下图像都能取得良好效果。
图像中任意一点X(x,y)的背景亮度B(x,y)由其本身与周围8点亮度加权平均得到:
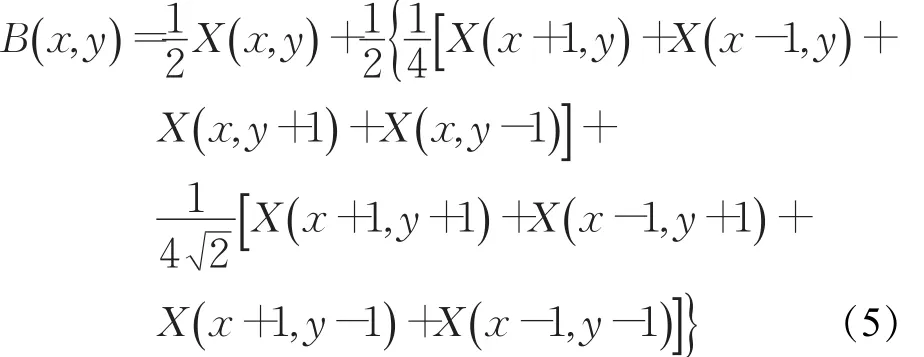
利用以上信息,可推导出图像各个区域的JND计算公式,见表1。
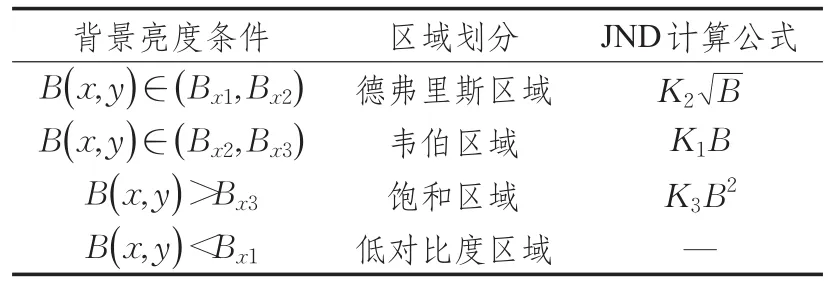
表1 图像不同区域JND计算公式
在实际操作中,通常将低对比度区和饱和区合并为一个区域,对处理结果不会产生影响。
3 基于人眼视觉感知特性的对比度增强
3.1 分区域亮度校正
当人眼“看到”一幅图像时,人眼首先会对图像的整体亮度进行评估[11],然后再依据局部区域与其周围区域的亮度相对关系确定局部区域亮度水平[12]。井下由于完全采用人工照明,图像多呈现出光场分布不均匀,整体灰度值偏低的特点,图像主要信息显示部分大多落在暗区域和德弗里斯区域内,但由于存在小面积人工光源,导致井下图像动态范围很大,所以采用常用的线性图像调整方法难以获得理想的图像质量提升。为此,提出一种处理方法,对图像的整体亮度进行非线性调整,对过亮区和过暗区亮度进行调节,达到压缩图像动态范围,增强图像全局对比度,以便于后续运算。本文利用的非线性亮度映射模型如下:

其中,I(x,y)表示归一化后的原始图像亮度,X(x,y)表示亮度调节后的图像亮度,参数Δ用于控制曲线的形状和位置。图3显示了Δ从0.001(最弯处)到1变化时对应的函数曲线。

图3 非线性亮度映射模型
由图3可以看出,这是一种类似于传统gamma曲线的映射模型,但是在低亮度区域坡度较低,呈现出比gamma校正更好的曲线特性,理论上更加适合处理存在大面积低照度区域的井下图像。曲线定义域与值域相同,通过调节Δ参数可以对图像暗区域进行不同程度的非线性调整,具有很好的灵活性。
本文算法中,对图像划分的几个区域选取不同的参数Δ进行亮度调整,不仅能够增强暗区的细节,又能够避免亮区域的失真,优于传统的全局校正方法。
3.2 重建增强图像
虽然本文算法在进行图像增强处理之前对图像进行了区域分割,但重建时只需在空间域上直接进行拼接,无需考虑区域重叠和边缘噪声问题。这是因为:首先在空间域上,图像中每个像素点都只属于一个区域,不同区域各自分立。其次,在区域划分规则中,处理区域边缘部分像素点时,与其相邻但属于临近区域的像素点亮度参与背景亮度计算,区域边界部分背景亮度信息包含临近区域的像素点亮度信息,所以各个区域边缘在亮度域是关联的,边界处的亮度变化也是自然平滑的。第三,尽管算法对不同区域进行不同尺度的增强,理论上增强后图像直接拼接会引入高频噪声,但实验发现,如果合理选择增强策略,可以很大程度地降低该噪声,使之不影响图像观感。综合以上几点,本文算法中可以直接将不同区域进行空间域上的拼接,大大降低了算法复杂程度。
3.3 本文算法
本文算法以人眼视觉感知特性为依托,按照图像背景亮度对图像进行区域划分,再对不同区域进行不同尺度的亮度调整,算法流程图如图4所示。

图4 算法流程图
本文算法中,对德弗里斯区域、韦伯区域和饱和区域的划分比例为3∶4∶3,算法中涉及一组参数,即各区域的校正参数Δi。文献[13]指出,视觉效果理想的图像的亮度平均值收敛于图像动态范围的灰度中值。因此,对各区域亮度调整参数Δi在[0.01,0.1]之间以0.01步长取值。选取Δi时,既要观察校正后图像亮度均值是否接近与图像动态范围中值,又要保证图像不会出现细节过度削弱,根据上述两条原则,获取Δi的最优解。在本文实验过程中,德弗里斯区域、韦伯区域和饱和区域各自对应的调整参数Δi分别是0.01、0.02和0.03。本文通过大量实验确定以上参数值,实验结果表明其对于大部分图像能取得良好效果。
4 实验与结果分析
为了验证改进后算法,本文选取8幅不同分辨率的井下图片进行实验,并从主观视觉效果和客观评价指数两个方面,将本文算法处理结果与井下图像处理常用的HE方法[14]和MSR方法[15]处理结果分析比较。实验环境为Matlab2010a,计算机CPU为酷睿i3-2350,内存2.91 GB,操作系统为Windows XP SP3。实验结果如图5~图12所示。
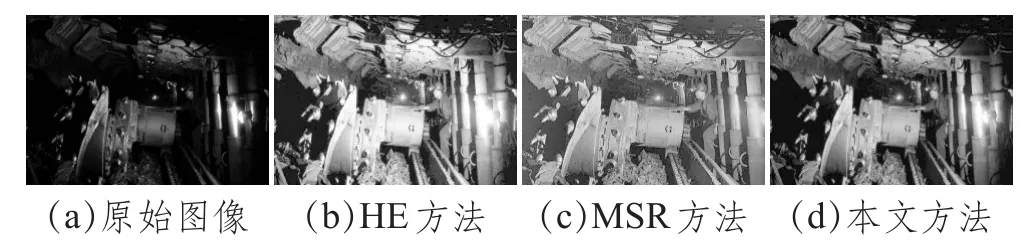
图5 图像1实验结果

图6 图像2实验结果
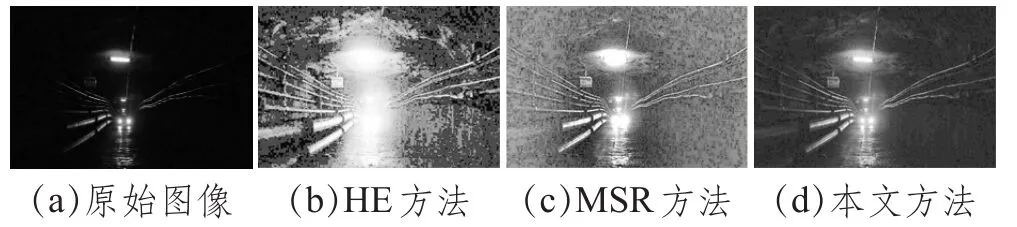
图7 图像3实验结果
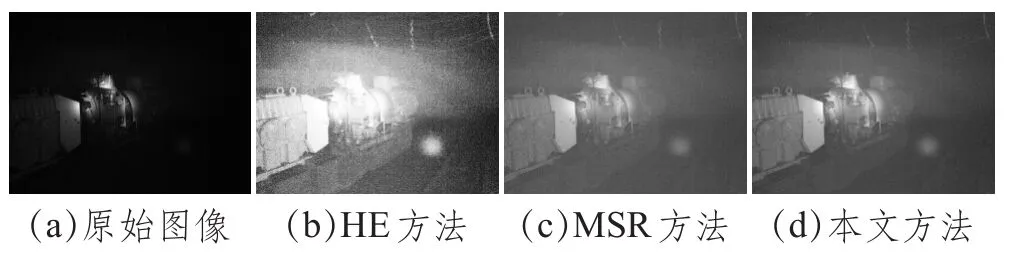
图8 图像4实验结果
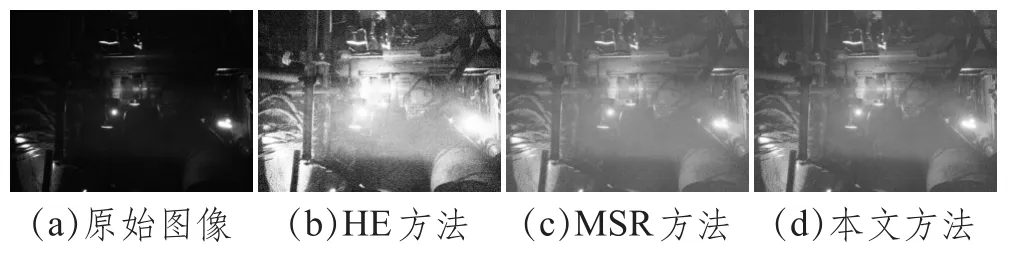
图9 图像5实验结果
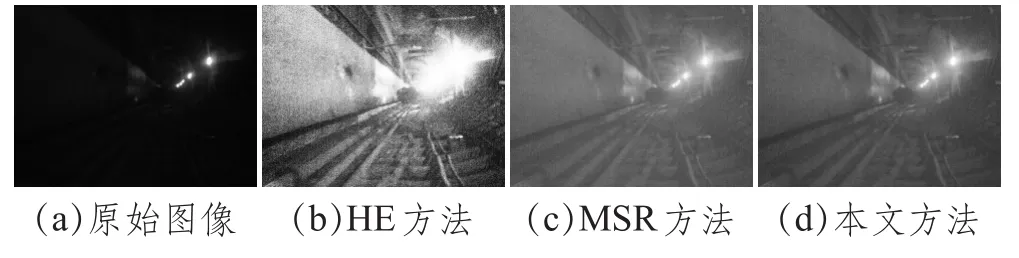
图10 图像6实验结果
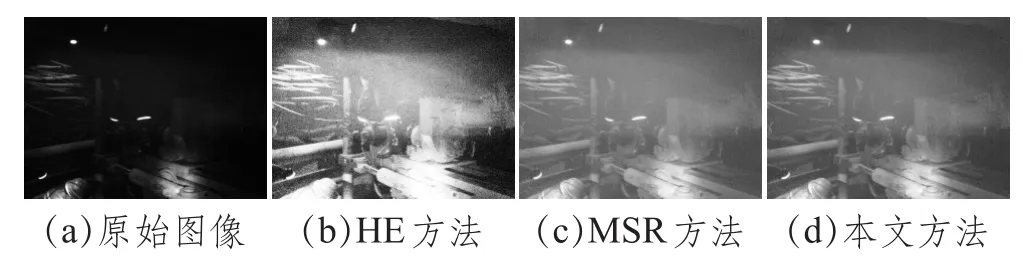
图11 图像7实验结果
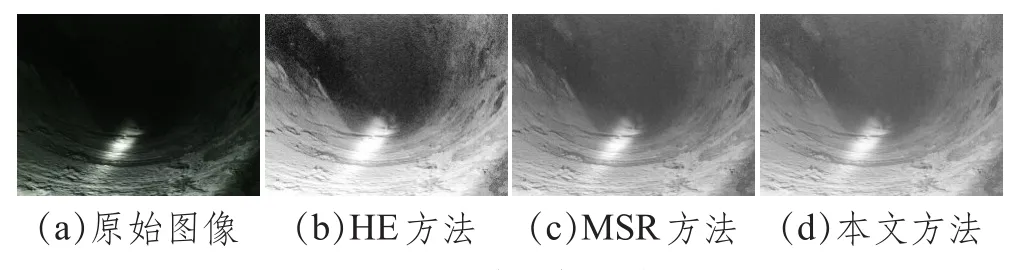
图12 图像8实验结果
4.1 主观评价
从以上8组图片可以看出,原井下图片多处光线不足,整体较暗,且存在单一光源,导致图像整体光线分布不均匀,但亮度动态范围很宽,不利于后续目标跟踪和识别。对比不同方法处理效果,不难发现,HE方法能较好地调整图像整体亮度,但其处理后的图像往往出现明显的过增强现象和细节丢失现象,如图5工人身后支柱部位光晕、图7、图10的照明灯光晕以及图11底部亮斑区域,经HE方法增强后边界变得更为模糊。MSR方法处理后的图像效果较HE方法有较大提升,可以较好地增强暗区细节,但在亮区域仍存在不同程度的“光晕伪影”现象和细节丢失现象,如图5工人身后支柱光晕出现灰化现象,图6的墙壁、屋顶部分细节纹理信息被破坏,图7~图10中点光源部分边缘模糊,难以识别。
对比上述实验结果,本文算法既能够实现低照度区域的对比度增强,又能够很好地保持图像细节和边缘信息,有效改善HE方法和MSR方法存在的图像灰化、亮区域过增强、边缘细节增强效果差和光晕伪影等问题。经本文算法增强后的井下图像可以取得较好的视觉效果,图像质量明显优于HE方法和MSR方法。
4.2 客观评价
本文采用信息熵(Entropy)、峰值信噪比(PSNR)、均方误差(MSE)和运行时间作为增强算法的评价指标。信息熵表示图像的混乱程度,通常来说,熵值越小,表明图像所包含信息越少[16],其表达式为:

峰值信噪比(PSNR)和均方误差(MSE)利用处理后图像与原图像的偏差程度来衡量图像质量,反映了重构图像与原图像之间的差距。PSNR值越大,MSE值越小,说明图像失真越小,质量越高,MSE和PSNR表达式为:

式中f(i,j)为原图像,g(i,j)为处理后的图像,m和n分别为图像的长宽尺寸。
8组实验图像的客观评价指标结果统计如表2~表5所示。

表2 实验图像PSNR结果统计
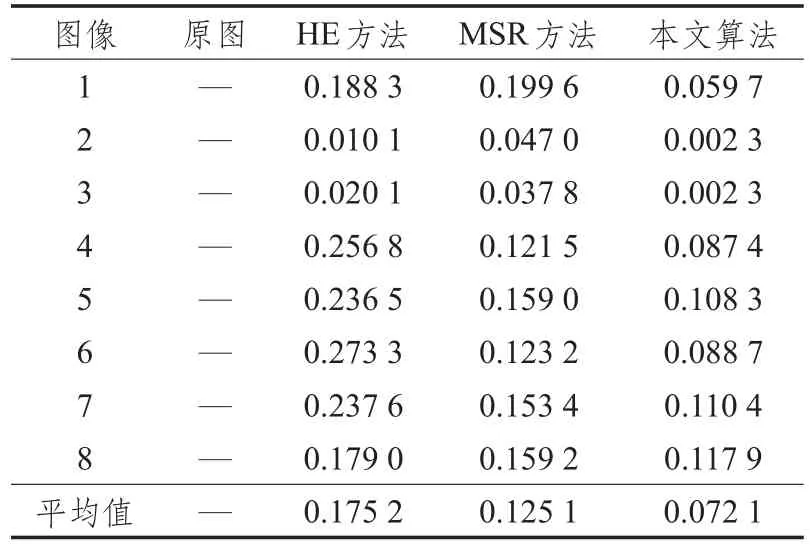
表3 实验图像MSE结果统计
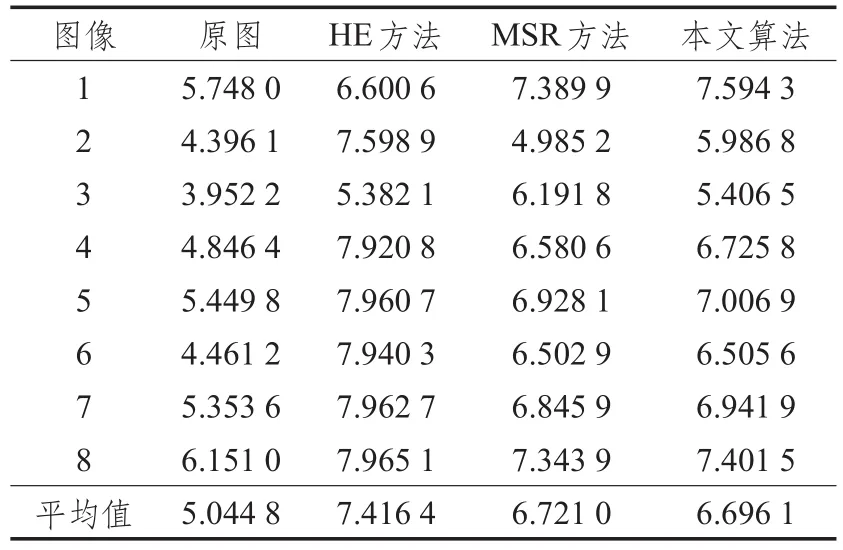
表4 实验图像信息熵结果统计

表5 实验图像处理速度结果统计 s
由以上统计结果可以看出,三种算法都在一定程度上增强了图像质量,图像的信息熵、PSNR和MSE指标均有不同程度的改善,这说明图像动态范围增大,对比度增强,清晰度增加。从数据上看,MSR算法和本文算法均优于HE方法,且本文算法的PSNR、MSE指标均为最优,信息熵指标与MSR方法接近。处理速度一项体现了本文算法的高效性。由于HE方法只是对图像进行线性计算,所以其速度最快,MSR算法需要先对图像进行多个尺度的划分、卷积和合成,处理速度最慢。本文算法处理速度虽弱于HE方法,但对MSR方法有约300%~600%的速度提升。
综上所述,本文算法克服了传统MSR算法的过增强现象和细节丢失现象,对HE方法和MSR方法的“光晕伪影”现象有一定改善,运算速度相较于MSR方法有约300%~600%的提升,结合主观感受和客观指标,本文方法实现了增强图像暗区细节的同时调整图像对比度,处理结果优于HE方法和MSR方法。
5 结语
本文依据人眼视觉感知特性对图像进行划分,之后构造增强函数,对不同区域的图像进行不同尺度的对比度增强,然后将增强后的各区域重新整合成一幅图像。实验证明,本文算法可以很好地保留图像暗区域细节,同时避免过增强现象和“光晕伪影”现象,处理效果由于传统HE方法和MSR方法,适用于煤矿井下图像的增强处理,同时适用于其他需要对低照度图像进行增强的应用场合。
参考文献:
[1]牛聚粉,程五一,王成彪.可视化煤矿安全信息共享平台的构建[J].辽宁工程技术大学学报:自然科学版,2010,29(3):381-384.
[2]王焱,刘海涛.一种改进椒盐去噪方法在井下图像中的应用[J].计算机工程与应用,2016,52(17):177-180.
[3]李文峰,姜敏霞,徐克强,等.井下图像增强的一种方法[J].现代矿业,2012(1):42-44.
[4]刘毅,贾旭芬,田子建.一种基于同台滤波原理的井下光照不匀图像处理方法[J].工况自动化,2013,39(1):9-12.
[5]程德强,郑珍,姜海龙.一种煤矿井下图像增强算法[J].工况自动化,2015,41(12):31-34.
[6]朱立新,王平安,夏德深.基于梯度场均衡化的图像对比度增强[J].计算机辅助设计与图形学学报,2007,19(12):1546-1552.
[7]陈亚妮.基于视觉特性与图像模型的增强算法与性能分析[D].南京:南京理工大学,2012.
[8]张新龙,汪荣贵,张璇,等.基于视觉区域划分的雾天图像清晰化方法[J].电子测量与仪器学报,2010,24(8):754-762.
[9]Kundu M K,Pal S K.Threshholding for edge detection using human psychovisual phenomena[J].Pattern Recognition Letters,1986,4(6):433-441.
[10]Panetta K A,Wharton E J,Agaian S S.Human visual system-based image enhancement and logarithmic contrast measure[J].IEEE Transactions on Systems Man and Cybernetics Part B-Cybernetics,2008,38(1):174-188.
[11]Meylan L,Susstrunk S.High dynamic range image rendering with a Retinex-based adaptive filter[J].IEEE Transactions on Image Processing,2006,15(9):2820-2830.
[12]王守觉,丁兴号,廖英豪,等.一种新的仿生彩色图像增强方法[J]电子学报,2008,36(10):1970-1973.
[13]郑婷.基于人眼视觉感知图像对比度增强算法的研究[D].成都:电子科技大学,2015.
[14]冈萨雷斯.数字图像处理[M].3版.阮秋琦,译.北京:电子工业出版社,2011.
[15]黄向东,郑莉洁.一种基于Retinex的矿井非均匀照度图像增强算法[J].科学技术与工程,2014,14(5):141-144.
[16]卢健,彭嫚,卢昕.遥感图像相关性及其熵计算[J].武汉大学学报:信息科学版,2006(6):476-480.
猜你喜欢
家庭影院技术(2021年6期)2021-07-28
家庭影院技术(2020年10期)2020-12-14
快乐语文(2019年9期)2019-06-22
摄影之友(影像视觉)(2019年3期)2019-03-30
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
小学生优秀作文(低年级)(2018年10期)2018-10-13
小天使·六年级语数英综合(2017年5期)2017-05-27
优雅(2016年12期)2017-02-28
Coco薇(2016年10期)2016-11-29
电影故事(2016年5期)2016-06-15