基于激光雷达技术的粉尘污染源监测
2018-05-07 00:39李正强谢剑锋刘小强谢一凇陈兴峰
中国环境监测 2018年2期
吕 阳,李正强,谢剑锋,张 丰,刘小强,刘 诏,谢一凇,许 华,陈兴峰
1.中国科学院遥感与数字地球研究所国家环境保护卫星遥感重点实验室,北京 100101 2.河北省环境监测中心站,河北 石家庄 050000 3.中国科学院大学,北京 100049
随着经济快速发展,城市规模不断扩大,大气污染已经严重影响了人们的生产生活[1-2];虽然大部分排污企业已按要求安装了污染排放在线监测仪器来采集烟气流速、浓度及硫化物和氮化物等含量信息。但是各厂家的监测仪器仪表不尽相同,监测数据对比性差,使得大量观测数据无法共享使用。同时,这些仪器仪表由于安装和监管等问题,无法完全排除人为影响。
遥感技术用于大气污染探测,具有客观及非接触等优势[3-4]。但是,常用的被动遥感,一方面受限于辐射源[5],无法实现全天时探测;另一方面受限于面观测,只能获得柱信息[6]。激光雷达技术作为探测大气颗粒物的新型主动遥感工具[7-8],在颗粒物变化监测方面具有全天时、大范围、廓线探测等独特优势。作为一种新型技术,激光雷达在应用到实际监测过程中时,还存在一些技术和应用方面的问题,需要通过现场实验进行梳理以获得解决和发展。研究通过实验,对一个污染源的排污进行激光雷达监测,分析烟尘排放强度与激光雷达信号间的关系,验证激光雷达技术用于粉尘污染源排放监测的可行性。
1 实验部分
1.1 主要仪器
实验采用地基微脉冲激光雷达作为主要的观测仪器,该仪器型号为CE370-2(法国)[9]。它根据大气对激光的散射、吸收等物理效应,通过定量分析激光大气回波,进行大气参数探测。主要由激光器、发射及接收望远镜系统、光电转换系统、高速数据接收处理系统和软件系统组成。高方向性、高亮度和高脉冲重复率,使激光雷达可以对大范围大气进行实时快速监测。此外,微脉冲技术具有对人眼安全的优势。激光雷达的主要技术参数见表1。
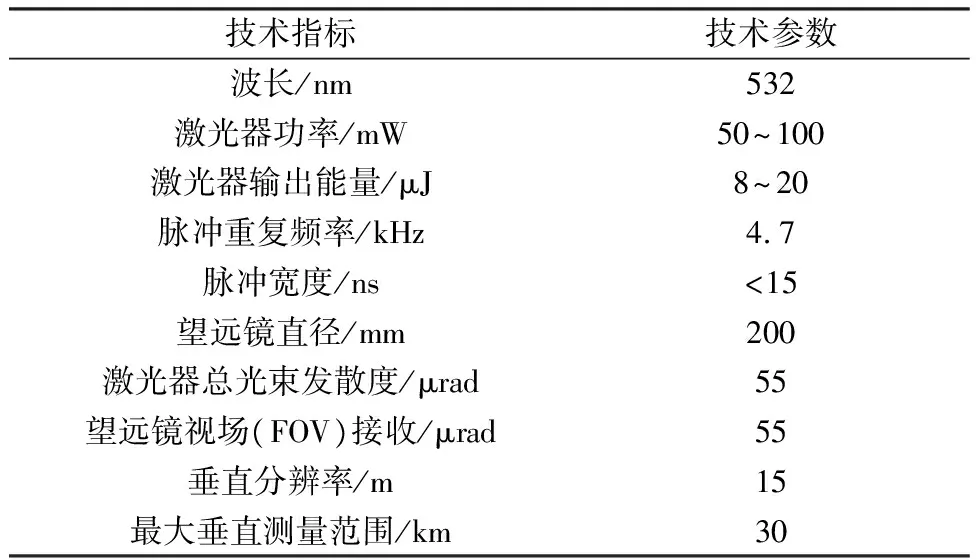
表1 CE370-2型微脉冲激光雷达主要技术参数
1.2 实验地点
实验地点位于河北省西南部,太行山中段东麓,地势西高东低。区域内公路、煤场、矿场、水泥厂等散布。研究以区域内水泥厂的一个排污烟囱为观测目标(图1),通过激光雷达定点监测,分析主动激光雷达技术对偷排偷放的监测能力。该水泥厂采用布袋除尘方式,除尘率在99%以上。在水泥生产时,原料经过皮带机的输送进入生料磨,同时增湿塔的烟气喷入生料磨,帮助生料进行粉磨。生料粉磨出来的物料,即生料,进入高效旋风分离器,进行分离,粉尘进入窑尾收尘器,生料落下,经过皮带机或螺旋输送机,送入生料均化库。

图1 实验地点和观测方向示意图
在河北省环境监测中心站的监控下,工厂在烟囱下方安装了在线监控设备,数据实时上传至河北省环境监测中心站,并定期利用河北省环境监测中心站的标准仪器对工厂的仪器设备进行对比标定。在线监控设备工作原理是将烟尘采样管由采样孔放入烟道,应用皮托管按等速采样要求抽取一定量的含尘气体,根据滤筒捕集的烟尘重量以及抽取的气体体积,计算颗粒物的排放浓度及排放总量。测试仪同时应用定电位电解法定性或定量测定O2、SO2、CO、NO、NO2、H2S、CO2等气体的含量,同时提供烟气温度、含湿量等参数。该仪器可用于各种锅炉、炉窑烟尘(气)的排放浓度或总量测定。实验中自动烟尘(气)测试仪用于探测烟囱口处排放颗粒物的浓度,为激光雷达探测信号值的比照提供参考数据。
1.3 实验方案
将水泥厂的3号窑尾烟囱作为观测对象,地表宽广平整的花坛作为观测点,该观测点距观测对象约750 m。从2015年6月9日17∶10—10日04∶00对3号窑尾烟囱进行观测,通过观察实时数据接收界面,直观与烟尘排放浓度变化对比。然后设置一个激光雷达信号指数因子,与在线仪器获取的烟尘排放浓度统计分析,验证两者可对比性。
实验从2015年6月9日17∶10开始。首先进行了约3 h的观测,用以确定污染源排放的稳定性及Lidar信号的可对比性。其中,17∶10—19∶10风速较小、大气稳定,认为是稳定排污过程;然后拔除除尘袋,增加排污强度(表2),并观察Lidar信号的变化;23∶30结束封闭气室,排污强度再次降低。
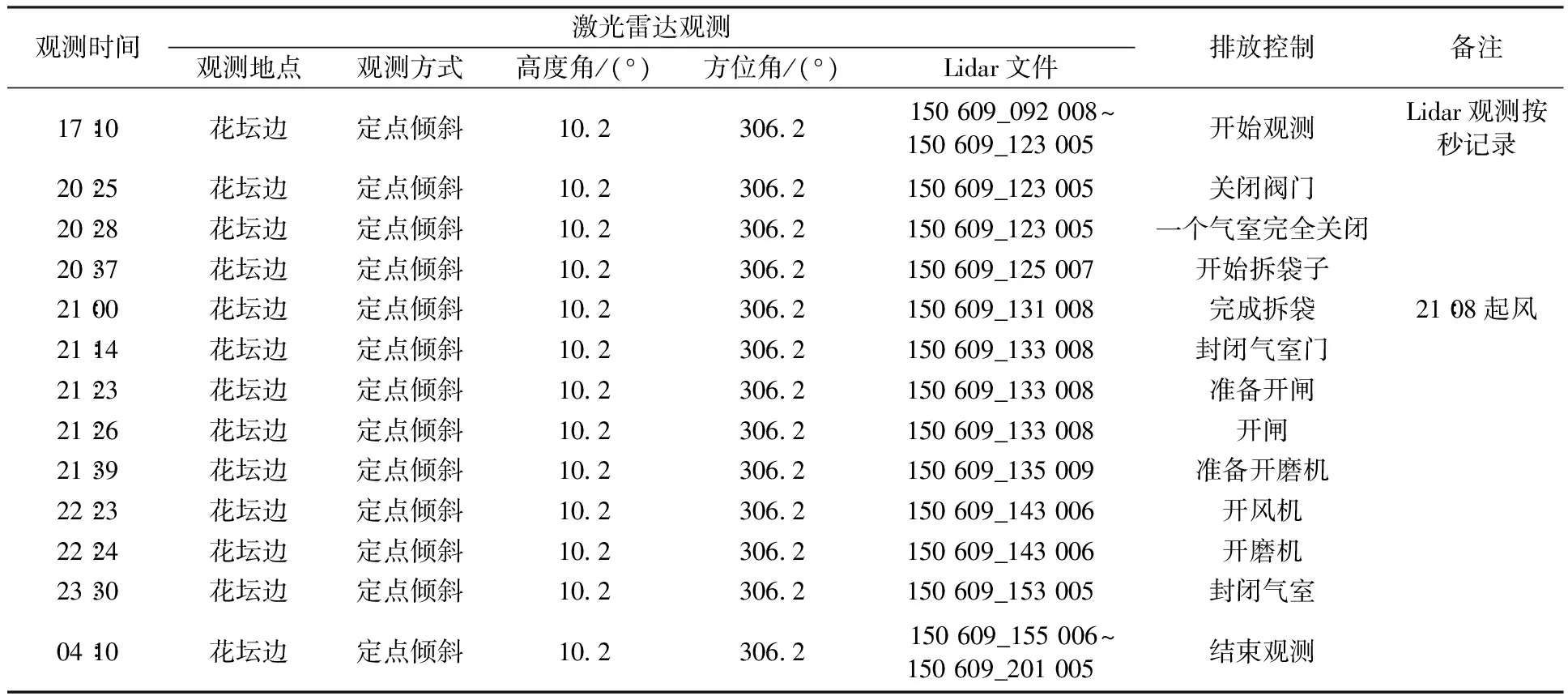
表2 激光雷达粉尘点污染源监测实验过程
2 数据处理
2.1 激光雷达探测原理
激光雷达探测大气的基本原理即激光与大气相互作用的机制。激光器产生的激光束经发射到大气中,在大气中遇到空气分子、气溶胶等成分便会发生散射、吸收等作用。散射中的小部分能量(后向散射光)落入接收望远镜视场被接收。其基本原理可以用公式来表示:
(1)
式中:P(Z)为接收的信号,Z为信号到激光雷达的距离,C为激光雷达系统常数,E为激光脉冲能量,β为后向散射系数,T2为双向透过率。BG、AP、DTC、O(Z)分别表示背景噪声、残余脉冲、探测器延时校正和重叠因子校正。
2.2 激光雷达确定污染源位置
由于窑尾烟囱距离观测点较远,无法直接用肉眼观察激光光斑位置,为准确定位污染源位置,实验采用十字扫描方式确定,并通过激光测距仪进行验证。
具体实施方法是将激光雷达大体指向窑尾烟囱所在方向,固定高度角,在观测目标左右约10°范围内进行水平扫描,观察激光雷达信号,当信号由平滑变为有明显峰值,随着扫描信号峰值消失时,即认为该角度为烟羽所在方位角。然后固定方位角,从较低的高度开始进行垂直扫描,起初激光光斑打在烟囱柱体上,信号显示无法穿透,通过逐渐上调高度角,当激光雷达信号突然出现穿透时,即为烟囱口所在位置。通过激光雷达仪,测量观测点到3号窑尾烟囱的距离,与激光雷达信号峰值位置对比,两者差值较小。标记高度角和方位角,即为污染源位置。图2为不同时间激光雷达接收的回波信号(P),可以看出回波信号随高度变化,在约750 m处存在一个高峰值,即为污染源位置。
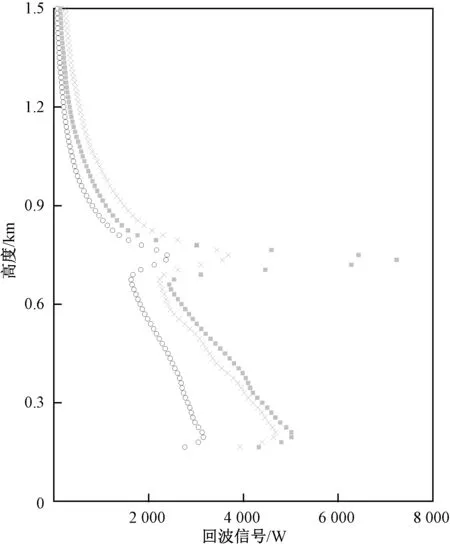
图2 不同时间的激光雷达回波信号变化Fig.2 The signal changes ofLidar at different time
2.3 激光雷达信号校正
激光雷达探测烟尘颗粒物后得到原始数据见图3(a),可以直观看出污染源处(约750 m)信号的峰值。如式(1)所示,大部分参数是与距离相关的函数。而激光雷达信号测量的是每秒的光电子数和距离。在对原始数据进行几个相应的校正后[10],可以获得距离校正信号,主要包括探测器延时校正、背景噪声校正、残余脉冲校正、几何因子校正、低通滤波、距离校正等。其中,探测器延时校正是为了消除因光子计数时探测器饱和而造成的光子计数损失;背景噪声校正是为了消除因大气背景光进入到探测器而产生的噪声;残余脉冲校正是为了消除仪器内部因发射激光束带来的残余脉冲所造成的影响;几何因子校正是为了校正因收发系统非共轴或者收发系统共轴系统自身阻挡造成的距离较近光路上回波信号的未完全接收;低通滤波是为了滤除高频噪声,提高信噪比;距离校正则是为了校正后向散射信号随距离平方衰减的问题。用公式表达为
S(Z)=C×E×β(Z)×T2
(2)

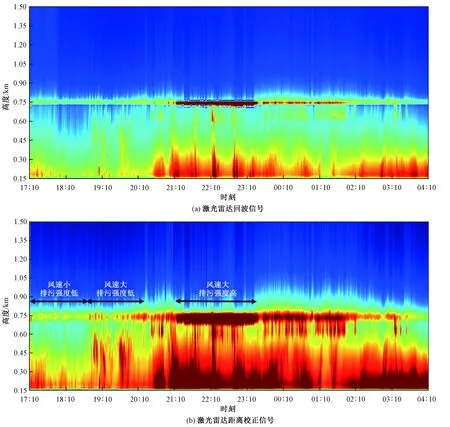
图3 2015年6月9日17∶10—10日04∶10激光雷达观测结果
图3(b)为2015年6月9日17∶10—10日04∶10 激光雷达距离校正图像,与图3(a)对比,可以看出随排污强度的增加,污染源处信号强度明显增大。图3(b)在19∶00以后,由于风速增大,近地面信号强度开始增加并且有一些波动。在约600 m高度处,有不时出现的小高峰值,是因为风向不稳定,风速大,使3号窑尾烟囱附近低矮排污的不固定方向污染传输。另外,由于风速较大,750 m处有部分污染在观测路径上扩散。
2.4 激光雷达点污染监测指数因子计算
由于激光雷达接收信号是随距离衰减的,污染源处激光雷达信号强弱除了受粉尘排放强度的影响,同时受大气环境的影响。为了消除大气环境的影响,设置一个激光雷达点污染源监测指数因子(也称Lidar指数因子,C)来表示污染程度。
设距离r1处的激光雷达信号为
(3)
设距离r2处的激光雷达信号为
(4)
将大气分为大气分子(m)和气溶胶(a)两部分[11],即β=βm+βa,σ=σa+σm,则C可表示为
C=
(5)
式中:Sa和Sm分别表示气溶胶雷达比和大气分子雷达比,为气溶胶和大气分子的消光系数与后向散射系数的比值,则式(5)可以表示为
C=
(6)
式中:大气分子廓线采用美国标准大气模型,即认为βm、Sm为已知。假设大气稳定,认为在不受污染源影响区域的βa(Z2)变化较小,可忽略。则可以看出,C与βa(Z1)为正相关,即若排污强度增强,C增大。从C的定义可以看出,对比高度(Z2)应选择不受污染源影响,相对稳定的区域,研究通过选用了不同距离作为r2进行对比,认为选用污染源后方的信号能获得更好的结果,这主要是因为污染源前方受地面污染扩散影响大(图3),另外实验时主要为西北风,污染源排出的粉尘更易向污染源前方传输,因此研究选用800 m为对比距离。
3 观测结果及分析
将2015年6月9日17∶00—10日04∶00的每分钟数据进行统一分析,图4为在线仪器测得烟尘排放浓度与Lidar指数因子的时间序列图。
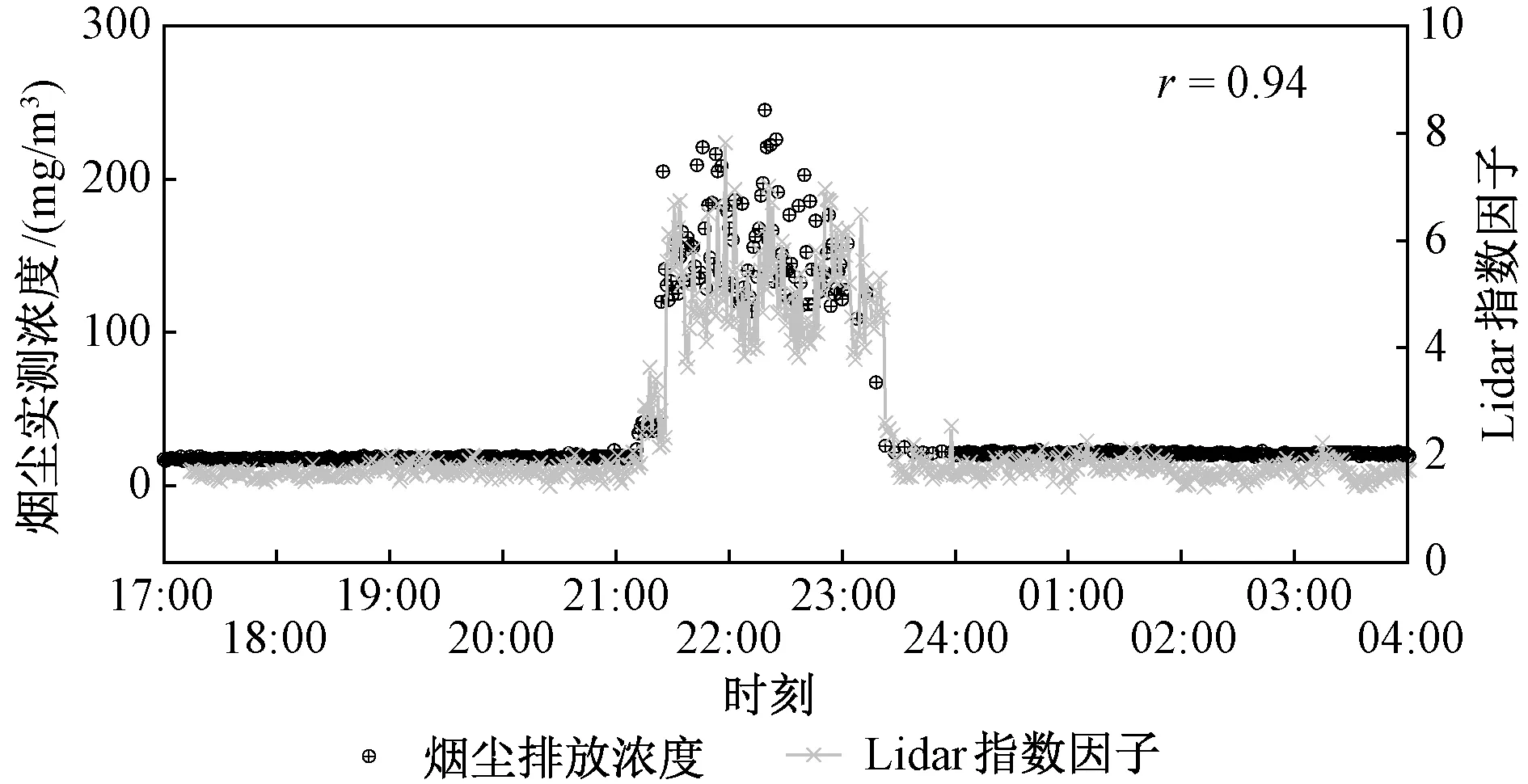
图4 2015年6月9日17∶00—10日04∶00(北京时间)在线仪器测得烟尘排放浓度与Lidar指数因子的时间序列
由图4可以看出,污染源排放强度可直观反映在激光雷达监测数据上,但是由于两者观测位置不同,Lidar指数因子比在线仪器测量的烟尘排放浓度具有更大的不稳定性。从烟尘排放浓度可以看出在21∶00—21∶26,完成拆袋、没有开闸时,烟尘排放浓度约增加1倍(20~40 mg/m3),Lidar指数因子也同时增加,增量约为30%(1.8~2.9)。开闸后,烟尘排放浓度从约40 mg/m3瞬间升到120 mg/m3(约3倍),但Lidar指数因子则逐渐从2.9升到6(增加约1倍)。对图4中烟尘排放浓度和Lidar指数因子进行统计,见图5。
由图5可以看出两者的频数分布基本一致。烟尘排放浓度主要集中在10~30 mg/m3,Lidar指数因子主要集中在1.5~2.0。排放浓度较强时,烟尘排放浓度主要集中在110~290 mg/m3,Lidar指数因子的频数分布也在3.75~6.25区间有峰值存在。

图5 频数分布直方图
根据环境保护部《水泥工业大气污染物排放标准》,水泥窑等热力设备的排放标准为30 mg/m3[12],而分析烟尘排放浓度的稳定排放阶段,烟尘排放均值约为18 mg/m3,图6分别展示了烟尘排放浓度、Lidar指数因子与稳定排放阶段均值的差值,其数值的大小可以表示变化幅度的大小。
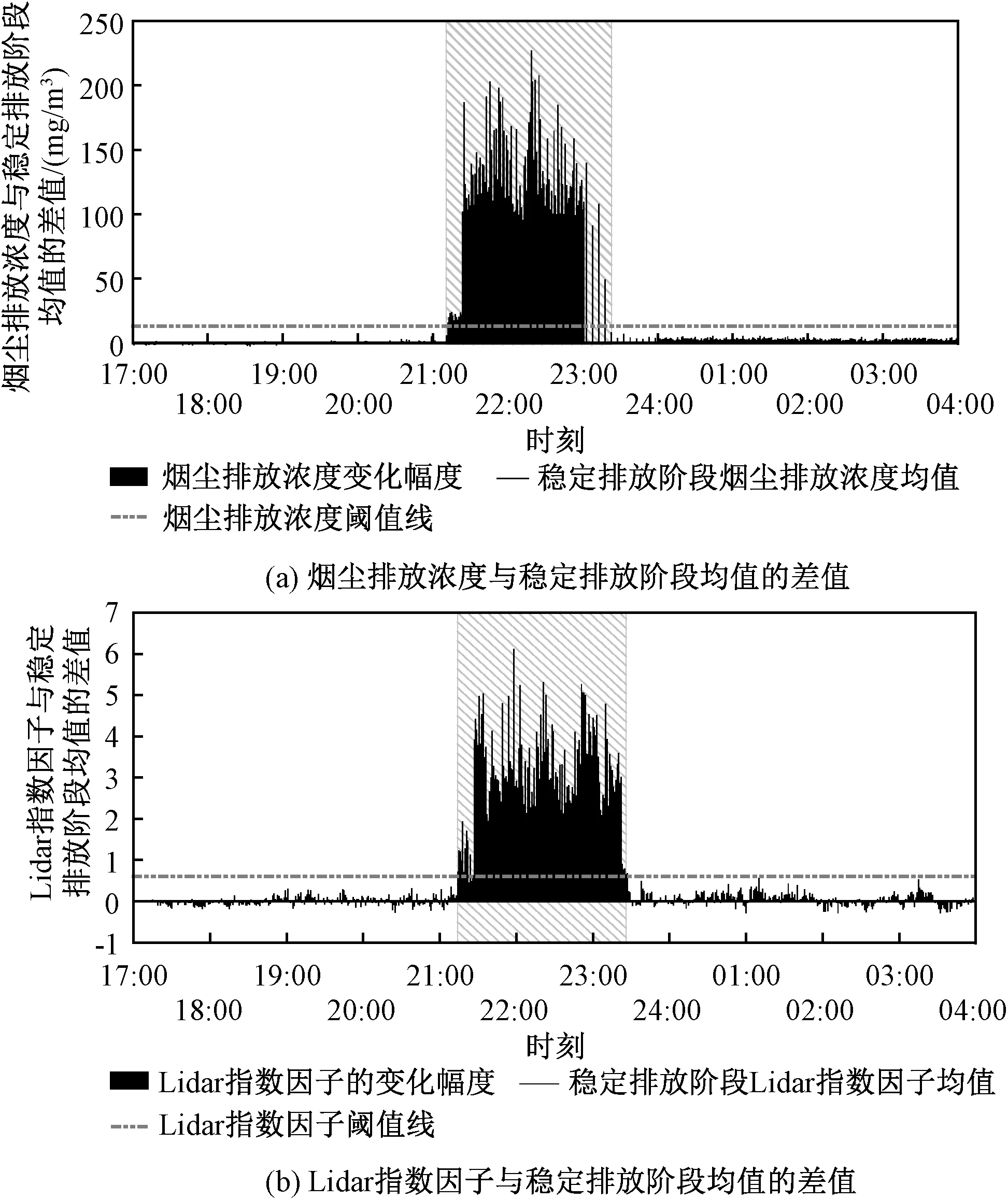
图6 2015年6月9日17∶00—10日04∶00(北京时间)在线观测与激光雷达观测对比
从图6中可以看出Lidar指数因子的变化幅度明显大于烟尘排放浓度,这主要是因为两者监测的位置不同。图6(a)为烟尘排放浓度与稳定排放阶段均值的差值,虚线为+12 mg/m3,即表示超标排放。可以看出,在稳定排放阶段烟尘排放浓度变化较小,一般不会超过2 mg/m3。 图6(b)的Lidar指数因子也以稳定排放阶段的均值(1.7)为基准,虚线为0.6,对应表示超标排放。可以看出,虽然Lidar指数因子稳定性较烟尘排放浓度差,但是在稳定排放阶段,Lidar指数因子变化一般也不会超过0.2。即使在实验后期,烟尘排放浓度整体有所增加(约21 mg/m3),Lidar指数因子变化一般也不会超过0.6。以2个图中的虚线作为排放阈值线(即烟尘排放浓度阈值为30 mg/m3,Lidar指数因子阈值为2.3),只有4条结果对不一致,均出现在排放浓度增加的开始和停止时间段,这主要是因为在线设备在烟囱底部,是实时、不受环境影响的记录,而激光雷达是对烟囱口的记录,烟羽在烟囱内部进行了混合、扩散、沉降,再从烟囱向外排放时浓度还不稳定,并且受外界风向、风速等气象因素的影响。因此,在稳定排污的情况下,可以将研究中波段组合的Lidar指数因子的限值设为2.3,进行粉尘污染源排污监测。
4 结论
1)经过距离校正后,激光雷达信号可以直观反映烟尘排放浓度,信号随烟尘排放强度的增加而增大,可用于点污染源排放监测。
2)综合考虑风向、近地面污染扩散影响后,选择污染源上风向与污染源处信号组成激光雷达点源监测指数因子,结果显示该指数因子与烟尘排放浓度具有很好的一致性,校正决定系数可达0.94。
3)针对水泥厂类型粉尘排污,对应水泥窑等热力设备30 mg/m3的排放标准,将激光雷达点源监测指数因子的限值设为2.3,可达到99%的监测一致性。
当然,由于激光雷达监测的是烟囱出口处浓度,与在线仪器在烟道内监测位置不尽相同,因此额外受到烟囱口处大气环境的干扰。尽管研究采用激光雷达点源监测指数因子方法可有效降低这种干扰,但局部信号相关性仍然较差。然而在实际监测中,激光雷达点源监测指数因子方法完全可以满足对粉尘点污染源超排超放监测的需求。
参考文献(Reference):
[1] BERT, STEPHEN T H. Air Pollution and Health [J]. The Lancet,2002,360(9 341):1 233-1 242.
[2] SMITH K R,WOODWARD A,CAMPBELL-LENDRUM D, et al. Human Health: Impacts, Adaptation, and Co-Venefits. In: Climate Change 2014: Impacts, Adaptation, and Vulnerability. Part A: Global and Sectoral Aspects. Contribution of Working Group II to the Fifth Assessment Report of the Intergovernmental Panel on Climate Change [R]. United Kingdom and New York: Cambridge University Press,2014:709-754.
[3] 李成才,毛节泰,刘启汉. 利用MODIS 资料遥感香港地区高分辨率气溶胶光学厚度[J]. 中国科学D辑:地球科学,2005,29(3):335-342.
LI Chengcai, MAO Jietai, Alexis Kai Hon Lau. Remote Sensing High Spatial Resolution Aerosol Optical Depth with MODIS Data over Hong Kong[J]. Chinese Journal of Atmospheric Science,2005,29(3):335-342.
[4] KAUFMAN Y J, TANRÉ D, REMER L A, et al. Operational Remote Sensing of Tropospheric Aerosol over Land from EOS Moderate Resolution Imaging Spectroradiometer [J]. J. Geophys Res,1997,102(D14):17 051-17 067.
[5] 赵英时. 遥感应用分析原理与方法[M].北京:科学出版社,2003:67-103.
[6] KIMM H, KIM S W, YOON S C, et al. Comparison of Aerosol Optical Depth Between CALIOP and MODIS-Aqua for CALIOP Aerosol Subtypes over the Ocean[J]. J. Geophys Res Atmos,2013,118(13):241-252.
[7] PAPPALARDO G, AMODEO A, AMORUSO S, et al. One Year of Tropospheric Lidar Measurements of Aerosol Extinction and Backscatter [J]. Atmospheric Chemistry & Physics,2003,46(2):401-413.
[8] HHUANG J, HHUANG Z, BI J, et al. Micro-Pulse Lidar Measurement of Aerosol Vertival Structure over the Loess Plateau[J]. Atmospheric and Oceanic Science Letters,2008,1:8-11.
[9] CHEN X, LU Y, ZHANG W C, et al. Comparison Between Dust and Haze Aerosol Properties of the 2015 Spring in Beijing Using Ground-Based Sun Photometer and Lidar.[C]∥ Optical and Optoelectronic Sensing and Imaging Technology.Beijing:AOPC,2015.
[10] RAMASWAMY T. Micropulse Lidar Observations of Free Tropospheric Aerosols over the Atmospheric Radiation Measurement Site at Barrow, Alaska [D].Alaska:University of Alaska Fairbanks,2006:14-23.
[11] FERNALD F G, HERMAN B M, REAGAN J A, et al. Determination of Aerosol Height Distributions by Lidar[J]. Journal of Applied Meteorology,1972,11:482-489.
[12] 环境保护部科技标准司.水泥工业大气污染物排放标准:GB 4915—2013[S].北京:中国环境出版社, 2013.
猜你喜欢
哈哈画报(2022年8期)2022-11-23
北京测绘(2022年5期)2022-11-22
山东冶金(2022年4期)2022-09-14
汽车观察(2021年8期)2021-09-01
中国交通信息化(2019年1期)2019-03-26
中小企业管理与科技(2019年29期)2019-01-27
电子制作(2018年16期)2018-09-26
小学阅读指南·低年级版(2016年1期)2016-09-10
中国工程咨询(2015年5期)2015-02-16
意林(2006年2期)2006-05-14