
动态跟踪场景中自适应层叠式粒子滤波
2018-05-04 01:00刘天键
电子元器件与信息技术 2018年1期
刘天键
(闽江学院物理学与电子信息工程系,福建 福州 350108)
0 引言
近年来,在动态环境中跟踪运动目标是计算机视觉领域的一个热门研究。当具有相似外表的目标相互靠近时,要让跟踪器准确地把目标区分开来是一件十分困难的事。大多情况是,由于特征相似度高,导致跟踪算法的失败,发生诸如错标或者混标的现象[1-2]。为了解决以上问题, Qu等采用粒子滤波器算法进行单目标的跟踪。他们提出了一种磁惯性势能模型来处理遮挡问题。磁惯性势能模型用于粒子滤波过程中权值的更新。磁模型表示目标之间排斥力,目标越靠近权值越低。惯性模型表示目标之间吸引力,目标越靠近权值越高。该方法对解决遮挡问题效果较好,但由于模型较复杂无法解决实时性问题。李等利用颜色和纹理特征表示目标,通过均值迁移和粒子滤波算法进行特征融合,有效地避免了单一颜色特征在光照变化和背景相似情况下的不稳定问题。但该方法对遮挡场景,应用具有一定的局限性。Zhou等[3]把压缩传感引入粒子滤波以解决分类器退化和特征退化引起的跟踪漂移。虽然该算法能解决部分遮挡的情况,但在目标运动呈现非线性,并且缺乏有效的颜色特征进行目标辨别的场景中,算法常常跟踪失败。总的来说,动态场景中目标的跟踪,即要考虑在遮挡发生时,及时进行特征更新[4];又要考虑算法的简单,以保证实时性的要求。本文提出了一种层叠式粒子滤波算法(HPF),在跟踪过程中根据不同的情况选择不同的特征进行权值更新,保持了跟踪的连续性。在MATLAB平台上,把本文提出算法与基于颜色粒子滤波算法(PF)进行比较,实验结果表明,HPF的鲁棒性能优于PF算法,尤其在发生大面积遮挡场景。
1 层叠式粒子滤波
层叠式滤波是把具有低计算复杂度并且高辨别能力的特征选为每层滤波器的输入,并在每一层计算候选目标与目标模型特征的似然值,通过多级筛选得到优质的候选样本,加权平均获得样本滤波值[5]。传统的粒子滤波算法,当粒子的权值过于分散时会导致跟踪失败,层叠式滤波器能在分层结构中将不可能的候选样本删除,从而有效地解决粒子权值分散问题。当动态场景中发生遮挡时,目标的外表特征削弱,目标的历史运动信息成为更能准确描述目标的特征,在此时应进行权值更新才能保证跟踪的连续性[6]。基于这种考虑,如果遮挡发生时,增加运动特征的权系数,就能从过去的运动信息中预测目标的状态,当遮挡消失后,保持跟踪顺利进行。HPF采用颜色特征作为第一层分类器的输入,边缘特征作为第二层分类器的输入,运动特征作为第三层分类器的输入,总输出为各层输出的加权和。在直方图中采用巴氏系数来进行相似度测量。在没有遮挡时,通过三层层叠筛选出候选样本,更新粒子权值,保证跟踪结果的正确。当发生遮挡时,降低层中表观特征的权系数、增加运动特征权系数来增强目标的区分能力,以保证跟踪结果的连续。同时,系统建立一个遮挡时刻图,以保证历史运动信息的准确。
1.1 运动模型
在进行跟踪操作之前,首先必须标定感兴趣的目标。目标的特征,例如:位置,假定是已知的,目标由椭圆标定。假设目标的状态变量由表示,即:


1.2 相似度测量
在定义了运动模型后,系统产生候选粒子,需要根据目标模型进行相似度的测量。测量是在候选目标和目标模型之间进行。本文选择巴氏系数来测量离散概率密度函数的相似度。巴氏系数定义为:

这里p(x) 和 q(x)分别是候选目标和目标模型中第x个特征值。当候选目标和目标模型非常相似时,巴氏系数值很大。如果巴氏系数值较小,表示候选目标和目标模型是不同的目标。
2 遮挡处理
遮挡处理是目标跟踪需要面对的主要问题。遮挡时,例如,建筑物和人,这时只有部分目标是可视的且分辨率很低,描述目标的特征缺失,容易导致跟踪的失败。当遮挡发生在两个相似目标之间时,颜色信息变得不再可靠。这时目标的位置和运动方向显得特别重要,要比外表特征更准确。为此HPF采用更新各层的加权值的方法,自适应目标的遮挡变化,从而保持跟踪的连续性[7]。为了保证历史运动信息的准确性,算法需要维护一个遮挡时刻图以选出未遮挡帧的目标运动信息。通过前两层分类器的输出对遮挡进行判断,并记录到遮挡时刻图中。在跟踪过程中,系统检测是否发生遮挡。如果系统检测到在两个目标间发生了遮挡,即前两层输出概率低于门限值,则降低外表特征权值,提高运动特征的权值。
为了保持跟踪的连续性,采用一个缓存来记录历史帧中感兴趣目标的中心位置。如果在某一帧中失去了感兴趣目标,算法使用遮挡时刻图选出最近时刻未发生遮挡的二十帧中目标中心位置,并定义一个距离来删除某些帧,以提高准确度。HPF算法删除了二十帧中距离最大的四帧,保留的十六帧作为位置特征提取的基础。系统把前二十帧分成两类。被删除的四帧属于A类,而没有被删除的十六帧属于B类。

那么,可以计算十六帧的平均中心位置和平均距离。十六帧的中心位置和平均移动距离是:



3 实验结果
为验证本文算法的有效性,在MATLAT R2008平台上把本文提出HPF与PF算法进行比较。在奔腾IV2.8GHz,内存1024MB的PC机上,粒子数为300的条件下,通过测试目标中心坐标来评估算法的跟踪性能。我们选取一段直升飞机视频作为测试序列。序列包括各种不同类型的运动,并且部分时段发生遮挡现象。视频序列的大小是320*240,这个序列共有400帧,且直升飞机的运动范围很大。在开始阶段,直升飞机在蓝色天空翱翔,背景比较简单且颜色和直升飞机相差比较大。从66帧到245帧,直升飞机飞跃电线杆。在此之后直升飞机进入树林,此时背景的颜色和直升飞机的颜色非常相似。从280帧到284帧,一个操作员手持遥控器横向走动,直升飞机被操作员的身体完全遮挡。300帧之后,直升飞机飞离树林。图1和图2为两种算法得到的直升飞机中心位置。在280帧之前,两种算法都工作得很好,能跟踪目标,这是因为在这个阶段目标颜色与背景的颜色区别比较大。从280帧到284帧,目标被完全遮挡。284帧之后,外表特征不能把目标和背景区分开来,PF算法粒子分别呈发散状态,跟踪窗与目标脱离联系,导致跟踪失败;而HPF算法却能很好地跟踪目标,原因是我们在跟踪过程中引入了遮挡时刻图能正确地更新权值[8]。图3给出了两种算法跟踪效果的对比。从275帧的效果可以看出,HPF算法的粒子分布半径小于基于颜色的粒子滤波算法。第284帧发生完全地遮挡现象后,PF算法在此过程中粒子逐渐分散,到了288帧,算法跟踪失败。而本文提出的HPF算法收敛,粒子呈聚集状态,可以很好地跟踪目标。

图1 直升飞机运动的x轴坐标Fig 1. x coordinate of the helicopter motion
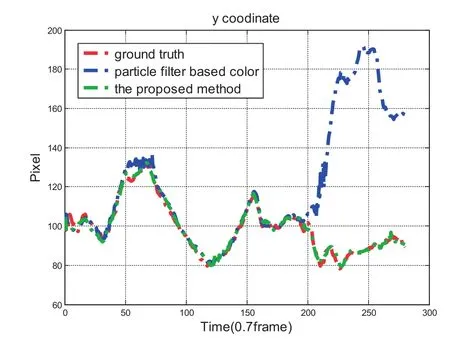
图2. 直升飞机运动的y轴坐标Fig 2. y coordinate of the helicopter motion

图3. 在完全遮挡情况下PF(左)与HPF(右)的跟踪效果比较Fig 3. Tracking the helicopter in heavy occlusions by particle filter (left)and Hierarchical Particle Filter (right)
4 结论
我们提出了一种新型的自适应层叠式粒子滤波器算法,设计算法的目的是解决遮挡条件下,目标跟踪的连续性问题。为此,引入遮挡时刻图标记遮挡的发生;当遮挡发生时通过历史运动信息进行子分类器加权系数的更新,给出候选样本的似然值,从而估计目标的状态。由于采用层叠式结构对目标模型进行设计,系统能在上面几层很快地拒绝了大部分的负样本。因此,算法速度并没有太大的降低。另一方面,引入了权值更新机制,大大提高跟踪算法的鲁棒性,甚至在完全遮挡的情况下,也能很好地跟踪目标。
[1]Qu W, Dan S, Mohamed M. Real-Time Distributed Multi-Object Tracking Using Multiple Interactive Trackers and a Magnetic-Inertia Potential Model[J]. IEEE Transactions on Multimedia, 2007, 9(3):511-519.
[2]孙巧,张胜修,曹立佳,李小锋,刘毅男.自适应模型更新的粒子滤波视觉跟踪[J].电光与控制,2017,24(02):1-5. SUN Qiao, ZHANG Sheng-xiu, CAO Li-jia, LI Xiao-feng, LIU Yi-nan. Adaptive Model Updated Particle Filter Visual Tracking [J]. Electro-optic and Control, 2017,24 (02): 1-5.
[3]Zhou T, Ouyang Y, Wang R, et al. Particle filter based on real-time Compressive Tracking[C]// International Conference on Audio, Language and Image Processing. IEEE, 2017.
[4]李远征 , 卢朝阳 , 高全学 ,等 . 基于多特征融合的均值迁移粒子滤波跟踪算法 [J]. 电子与信息学报 , 2010, 32(2):411-415. LI Yuan-zheng, LU Zhao-yang, GAO Quan-xue, etc. Mean Migration Particle Filter Tracking Algorithm Based on Multiple Features Fusion[J]. Journal of Electronics and Information, 2010, 32 (2): 411-415.
[5]Lu W L, Okuma K, Little J J. Tracking and recognizing actions of multiple hockey players using the boosted particle filter[J]. Image & Vision Computing, 2009, 27(1–2):189-205.
[6]孔凡辉. 基于粒子滤波的磁共振扩散成像人体心肌纤维重建方法研究[D].哈尔滨工业大学,2016. KONG Fan-hui. Research on Human Myocardial Fiber Reconstruction Based on Magnetic Resonance Diffusion Imaging of Particle Filter [D]. Harbin Institute of Technology, 2016.
[7]李天成,范红旗,孙树栋.粒子滤波理论、方法及其在多目标跟踪中的应用[J].自动化学报,2015,41(12):1981-2002. LI Tian-cheng, FAN Hong-qi, SUN Shu-dong. Particle Filter Theory, Method and Its Application in Multi Target Tracking [J]. Automation Journal, 2015,41 (12): 1981-2002.
[8]陈志敏,田梦楚,吴盘龙,薄煜明,顾福飞,岳聪.基于蝙蝠算法的粒子滤波法研究[J].物理学报,2017,66(05):47-56. CHEN Zhi-min, TIAN Meng-chu, WU Pan-long, Bo Yu-ming, GU Fu-fei, YUE Cong. Research on Particle Filtering Method Based on Bat Algorithm [J]. Physics Journal, 2017,66 (05): 47-56.
猜你喜欢
成都信息工程大学学报(2022年3期)2022-07-21
沈阳师范大学学报(教育科学版)(2021年2期)2021-02-01
小学生导刊(2017年13期)2017-06-15
自动化学报(2017年7期)2017-04-18
现代电子技术(2016年15期)2016-12-01
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
人生十六七(2015年3期)2015-02-28
电测与仪表(2014年15期)2014-04-04
作文大王·笑话大王(2014年2期)2014-03-05
