放飞过程中平流层飞艇运动与受力分析
2018-05-04 00:46:06张泰华姜鲁华周江华
北京航空航天大学学报 2018年4期
张泰华, 姜鲁华, 周江华
(1. 中国科学院光电研究院, 北京 100094; 2. 中国科学院大学, 北京 100049; 3. 中国科学院高能物理研究所, 北京 100049)
由于平流层在大气环境、气象条件和高度等多方面的综合特点,在平流层部署飞艇进行长期环境监测、通信中继和对地观测成为研究热点[1]。平流层飞艇的工作高度比卫星低,电波传播时延小,自由空间损耗小,造价相对较低。同时,平流层飞艇还有较强的抗毁生存能力。因此,平流层飞艇效费比将高于其他亚轨道飞行器和低轨卫星,在区域监控和天-地、天-空信息交互方面优势明显,无论是在军用,还是科学及民用领域,都具有极其广阔的应用前景[2-3]。在国际上,美国和日本等国进行了一些探索性试验,美国HiSentinel系列[4-5]和HALE-D[6-7]飞艇曾进行了一些关键技术探索和飞行试验,日本GTS系列[8]和SPF[9]不带动力飞艇也曾在升空试验中成功到达了平流层高度,这些工作为平流层飞艇技术的发展积累了一定的经验。
从解除地面设备对飞艇的约束到飞艇离开地面的过程即为飞艇的放飞过程。将体积庞大的平流层飞艇从艇库转运至放飞场,并尽快实施放飞决定了整个飞行试验是否能顺利实施,一些平流层飞艇在放飞阶段即被迫推迟或取消飞行试验[6-7,9]。平流层飞艇放飞后,由静止开始加速上升,艇体内氦气窜动引起浮心和重心变化导致飞艇运动复杂,庞大的体积和巨大的表面积导致了气动与附加质量的叠加,影响了飞艇的动力响应。位于柔性艇体上设备在放飞过程中的过载及其对柔性艇体的应力集中进一步增加了放飞过程的不确定因素和风险。
随着飞行试验的开展,国内外对平流层飞艇放飞过程也进行了大量研究。Selby[10]对平流层飞艇在不同工况下放飞及放飞后的特性做了较为深入的研究,分别分析了在顺风和逆风情况下实施放飞时所受的气动力及放飞风险;赵攀峰等[11]以常规布局形式的平流层飞艇为例,分析了飞艇放飞、回收的一般步骤,对上升、下降过程做了数值仿真分析;郭虓等[12]分析了飞艇基本热力学行为,研究了艇体及内部气体的能量方程并建立了详细的飞艇动力学和运动学模型,通过对不同场景的问题进行最优化轨迹求解,评估了飞艇在上升过程中,太阳能辐射和风场对热交换的影响,进而将不同时间点放飞对飞艇的影响进行了评估;吴雷等[13]分析了飞艇在放飞过程中因其所处环境的巨大变化导致飞艇内部气体质量和分布情况的变化情况,给出了能基本反映这一变化过程的飞艇放飞段动力学模型。总的来说,这些研究主要对飞艇放飞时机的选择及模型的求解进行了定性的分析,还没有开展较为系统的研究。
本文分析了放飞过程飞艇动力学响应特征,计算飞艇完成放飞所需的时间,以及在此期间飞艇的仰角、角速度和地面支撑力等变化。将计算结果与飞行试验比较,为平流层飞艇放飞过程提供了解析求解方法,也为相关操作及地面辅助措施的选择提供参考。本文在计算过程中忽略地面风对放飞过程的影响,主要分析放飞过程中的艇体气动阻力。
1 平流层飞艇囊体结构形式
平流层飞艇通常选择在20 km左右的平流层底部飞行或驻留,平流层大气稀薄,要依靠浮力保持稳定驻空,需要飞艇具有较大的体积,一般在数万至数十万立方米之间,飞艇的长度在百米量级[14]。平流层飞艇在地面时,由于大气密度较高,只需在飞艇内充入较少的氦气就能提供满足所需的升空浮力,艇囊90%以上的空间中充满空气以使飞艇保持设计外形。一般而言,平流层飞艇的艇囊可分为单氦气囊和多氦气囊2种形式,如图1所示。
单氦气囊结构中,艇囊中的氦气都在一个氦气囊中,与空气囊之间只有一个副气囊隔层,在飞艇纵向一般对气体无约束。日本于2003年8月成功实施了飞行试验的SPF-1飞艇即采用了单氦气囊结构[9],飞艇前点解除约束后,飞艇加速抬头升空,放飞照片如图2所示。
多氦气囊结构中,艇囊中的氦气和(或)空气被分割成了2个以上的单独空间,以限制其在飞艇纵向的窜动,防止飞艇姿态变化超出可控范围。为了便于在飞艇上升过程中排气顺畅和保持压差稳定,也可将氦气囊或空气囊进行局部联通。

图1 平流层飞艇氦气囊结构示意图Fig.1 Schematic of helium-envelope structure of stratospheric airship
美国于2011年7月进行了“HALE-D”平流层飞艇飞行试验[6-7](见图3),该飞艇解除两侧约束后,飞艇姿态平稳,推测其囊体结构采用了多氦气囊结构形式。
本文对平流层飞艇采用2种氦气囊结构形式的放飞过程进行分析,并将分析得到的单氦气囊结构的定量结果与飞行试验过程中获得的数据进行对比,验证分析计算方法的正确性,也为进一步优化放飞过程的操作提供依据。

图2 SPF-1飞艇放飞(日本)Fig.2 Launch of SPF-1 airship (Japan)

图3 HALE-D飞艇放飞(美国)Fig.3 Launch of HALE-D airship (USA)
2 单氦气囊结构放飞过程分析
根据单氦气囊结构的特点和安全可靠放飞的要求,一种典型的平流层飞艇放飞过程如图4所示。放飞前,飞艇接近于水平放置,艇体两侧各用2根绳索拉住,并使艇体后部坐落在支撑垫上,艇体处于小仰角状态;放飞时,解除艇体两端约束,在浮力作用下,艇体快速抬头,仰角迅速增大,当艇体前部升到一定高度时,后部脱离支撑垫,飞艇以大仰角状态起飞离地,放飞过程完成。
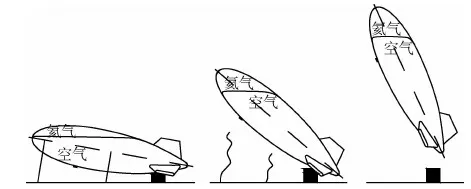
图4 一种单氦气囊结构飞艇的放飞过程Fig.4 Launch process of airship with single helium envelope structure
2.1 飞艇受力
飞艇依靠内部充气达到一定的正压,以保证其设计外形并使其具有一定的刚度。据此,假设飞艇为刚体,建立如图5所示坐标系。OXY坐标系为地面坐标系,O′xy为艇基坐标系,以飞艇体心为坐标原点,O′x轴为飞艇纵轴,O′z轴垂直O′xy平面,坐标轴符合右手法则。
图5中:T1和T2分别表示地面设备对飞艇约束力;Fb为艇囊内氦气总浮力;Nx、Ny为飞艇所受的接触力;G为艇体结构重力。
为使问题具有普遍性,假设飞艇在放飞前初始仰角为φ0。从后往前依次解除两端拉绳T2、T1的约束,飞艇前部逐渐升起。在此过程中的某一时刻,飞艇受力和角度如图6所示。

图5 飞艇放飞前受力示意图Fig.5 Force diagram before airship launch

图6 飞艇放飞过程中受力与角度示意图Fig.6 Schematic of force status and angle during airship launch process
地面坐标系与艇体坐标系的关系为

(1)
2.2 动力学方程
飞艇放飞前系统静止,力系平衡,有
(2)
式中:Fb、Fd和N分别为浮力、气动阻力和腹部支撑力。放飞后,在体心坐标系上建立方程,可得矢量形式的动力学方程[15]为
(3)

展开后,可得到6自由度标量形式的动力学方程。本文着重考虑飞艇发放过程纵剖面内的运动,因此抽取其纵向3自由度标量形式的动力学方程如下:
(4)
式中:MN为飞艇所受的接触力矩;Fx、Fy和Mz分别为浮力、重力、气动阻力产生的合力分量和合力矩;(xa,ya)为飞艇系统总质心。
式(4)变换后得
(5)
式中:J为飞艇转动惯量。
(6)
其中:mAx、mAy和Iz、IAz分别为附加质量和惯性矩。
运动学方程:
(7)
式中:φ为飞艇仰角。
(8)
2.3 约束条件
在放飞过程中,假设飞艇与支撑点P之间无相对滑动,飞艇质心与支撑点P之间距离为L。当飞艇仰角为φ时,图6中各角度间关系为
α=φ+θP
(9)
将飞艇姿态变化过程中质心近似为不变,则θP为常数,对式(9)求导,有
(10)
(11)
对式(11)求导,可得
(12)
将式(11)、式(12)代入式(5),得
(13)
2.4 力和力矩
根据飞艇受力,将飞艇受到的气动阻力分解为沿x和y2个方向,根据飞艇外形仿真得到这2个方向气动阻力系数[16],有
MN=L(NycosθP-NxsinθP)
(14)
(15)
式中:(xb,yb)为飞艇浮心;Ff为净浮力;Fdx和Fdy为飞艇气动阻力。
根据飞艇气动阻力公式[17],将式(11)代入得
(16)

由式(13)~式(16)得到解除约束后的动力学微分方程
(17)
式中:
f1=-L2(mycos2θP+mxsin2θP)+
2mL(xacosθP+yasinθP)-Jz
(18)
f2=L2[(mx-my)cosθpsinθp+
(19)
f3=Fb(xbcosφ+ybsinφ)-FfL(cosφcosθP+
sinφsinθP)-mg(xacosφ+yasinφ)
(20)
式(17)与式(7)、式(8)一起构成了方程的解。支撑点P所受的约束力,可由式(13)和式(15)得到,转换到地面坐标系为
NX=Nxcosφ+Nysinφ
(21)
NY=-Nxsinφ+Nycosφ
(22)
2.5 辅助方程
飞艇系统总质量为
m=ms+mHe+mair=
(23)
式中:c=ρ/ρHe,ρHe为氦气密度;ms、mHe和mair分别为艇体结构、氦气和空气的质量。系统总质心为
(24)
式中:(xs,ys)为艇体结构质心。总惯量为
(25)
式中:IHe、Iair和Is分别为氦气、空气和艇体的结构惯量;Izt为艇体几何惯量;Izb为氦气部分几何惯量。附加质量[18]和惯性矩为
(26)
式中:k1、k2和k3为附加质量系数。
2.6 工况分析
1) 飞艇放飞瞬间
在飞艇解除约束瞬间,由于ωz=0,由式(17)可求得此时飞艇初始角加速度:
(27)
根据艇上设备位置,进而可得艇上设备放飞时受到的初始过载。
2) 飞艇离地
因支撑点P无法提供拉力,由式(22)可得,当NY<0时,飞艇离开支撑点P,完成放飞。
3 多氦气囊结构放飞过程分析
多氦气囊结构中,艇囊内设置多个氦气囊,极大地限制了因飞艇姿态变化而导致的氦气窜动,也严格控制飞艇浮心变化。在飞艇放飞升空过程中,飞艇姿态一直处于可控状态。实施放飞时,飞艇一般小仰角或水平状态离地,其飞行过程如图7所示。
在实施这种结构飞艇的放飞过程中,飞艇浮心与重心保持不变,飞艇的运动形式将大大简化,解除约束后,飞艇加速上升。飞艇在放飞前后的约束及受力状态如图8所示。

图7 多氦气囊结构飞艇的飞行过程Fig.7 Flight process of airship with multi-helium envelope structure

图8 多氦气囊结构飞艇放飞前后受力Fig.8 Force status for multi-helium envelope structure before and after airship launch
解除约束后,在不考虑水平来流的情况下,飞艇将垂直上升,即
(28)
根据飞艇动力学方程,由式(4)变换后得
(29)
将式(29)中第1式代入第2式,整理得
(30)
在上升过程中的气动阻力,由式(16)有
从当今互联网发展的现状来看,强调用户量、用户关系、优质的内容依然是互联网发展中的有效保证。移动互联网的发展带来了哪些影响呢?改变了内容生产的分发方式,慢慢实现了中心化。在生产内容上,人人都可以成为内容的提供者,使移动互联网进入了全民时代。也是因为如此,移动短视频的生产内容逐步走向多元化。其中,最具有代表的两种:UGC和PGC。
(31)
代入式(15),得
(32)
式中:g为重力加速度。
将式(32)代入式(30),得
(xbcosφ+ybsinφ)Fb-(xacosφ+

(33)
式(33)与式(7)、式(8)一起构成了方程的解。
(34)
代入式(32),得
(35)
由式(35)即可求得稳定上升时的升速,也可根据设计升速,求出飞艇所需净浮力。
4 算 例
4.1 单氦气囊结构

根据上述分析,得到支撑点P受到的作用力(NX,NY)随时间变化曲线如图10所示。
飞艇在放飞过程中,质心水平和垂直速度的变化如图11所示,飞艇仰角随时间变化的计算结果和实测数据对比如图12所示,角速度随时间变化的计算结果和实测数据的对比如图13所示。从图12和图13的对比曲线可以看出,飞艇实际放飞中解除约束的响应比计算分析结果明显迟滞,这主要是因为在分析中将飞艇是近似为刚体,而实测角速度值较为发散是飞艇上的角度传感器的测量误差所致,但在变化趋势与计算结果一致,能够满足工程应用需求。
通过上述分析计算,得到飞艇整个放飞过程中的姿态变化如图14所示。
计算表明,飞艇放飞后17.9 s,NY<0,此后飞艇离开支撑点,也意味着飞艇完成放飞离开地面,此时飞艇仰角为43.8°。在飞艇放飞过程中,支撑点水平作用力最大NXmax=6.183 kN,支撑点垂直作用力最大NYmax=2.405 kN。

图9 参数xb,yb和Izb随飞艇仰角变化示意图Fig.9 Fluctuation of parameter xb,yb and Izb with airship elevation angle
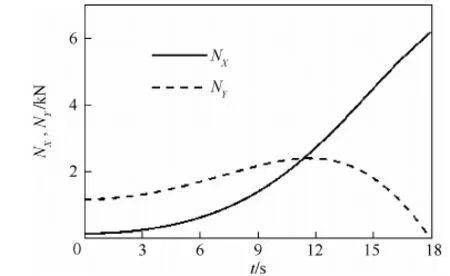
图10 飞艇放飞过程NX,NY变化Fig.10 Fluctuation of NX,NY during airship launch process
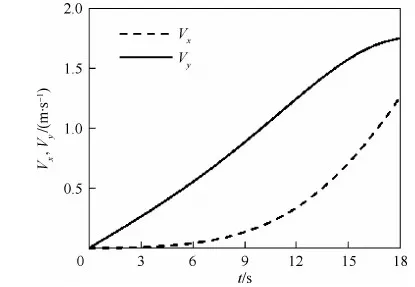
图11 飞艇放飞过程中质心速度变化Fig.11 Fluctuation of center-of-mass velocity during airship launch process

图12 飞艇仰角计算结果与实测数据对比Fig.12 Comparison of elevation angle of airship between calculation results and flight test data

图13 飞艇角速度计算结果与实测数据对比Fig.13 Comparison of angular velocity of airship between calculation results and flight test data

图14 飞艇放飞过程中的姿态变化Fig.14 Change of airship attitude during launch process
4.2 多氦气囊结构
如果算例所示飞艇采用多氦气囊结构形式,解除约束后飞艇重心和浮心都保持不变,利用第3节分析,可以得到飞艇解除约束后的仰角和升速变化如图15所示。
由图15可知,如果算例中的飞艇采用多氦气囊结构,放飞后稳定升速为1.56 m/s。在放飞过程中,解除约束后,飞艇升速在3~5 min内趋于稳定,仰角在21°~5°之间进行宽幅波动后趋于稳定。增大浮重比对飞艇仰角影响较小,但能显著增大稳定升速。如果平流层飞艇要快速升空,并安全穿过对流层顶疾风区,需增大浮力,以增大飞艇稳定升速。为此,以浮重比η作为输入参数,其定义为
(36)
不同的浮重比,飞艇稳定升空时的仰角和升速如表1所示。
由表1计算结果可知,飞艇浮重比增大,飞艇稳定升速增大,但对飞艇稳定仰角影响较小。选取浮重比η分别为1.1、1.5和1.8三种情况下,飞艇放飞后的升速变化如图16所示。

图15 放飞后飞艇仰角与升速变化Fig.15 Fluctuation of pitch angle and rising velocity of airship after launch
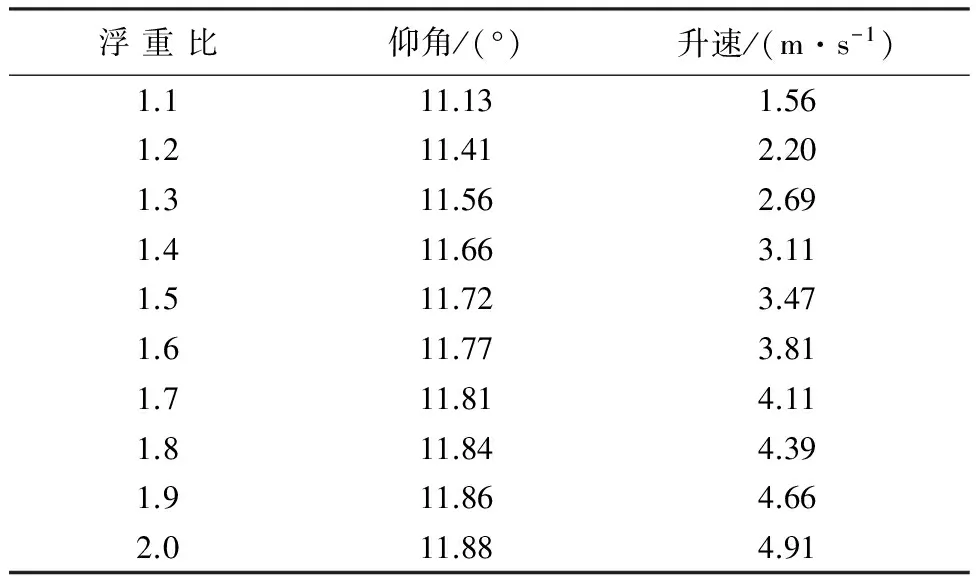
浮重比仰角/(°)升速/(m·s-1)1.111.131.561.211.412.201.311.562.691.411.663.111.511.723.471.611.773.811.711.814.111.811.844.391.911.864.662.011.884.91
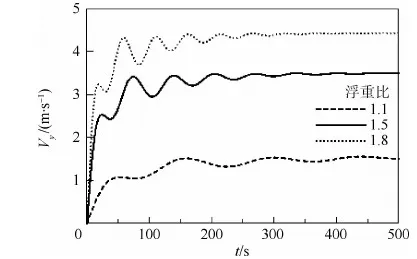
图16 3种典型浮重比下飞艇升速变化Fig.16 Fluctuation of rising velocity of airship for three typical buoyancy-weight ratios
4.3 两种结构形式比较
通过上述分析可知,氦气囊结构设计对飞艇放飞和升空影响很大,不同的氦气囊结构形式决定了飞艇放飞方式。在飞艇升空过程中,升速是一个非常重要的技术指标,以算例中的飞艇为例,不同的设计升速与所需的浮重比η如图17所示。
采用单氦气囊和多氦气囊结构形式,各有利弊,不同形式的氦气囊结构,决定了不同的放飞和升空过程。在飞艇到达设计高度,进行平飞阶段后,无论采用哪种氦气囊结构形式,其浮重比η都趋近于1,即达到浮重平衡状态。在飞艇上升过程中,随着高度增加,不但要排出空气囊中的空气以确保艇囊压差在安全范围内,也要逐渐排出多余氦气,以确保飞艇最终的浮重平衡。两种氦气囊结构的对比如表2所示。

图17 两种氦气囊结构升速与浮重比关系Fig.17 Comparison of rising velocity and buoyancy-weight ratio between two kinds of helium envelope structure

比较项目单氦气囊结构多氦气囊结构氦气分布同一容腔多个容腔飞艇浮心变化很大,不可控很小,受控升空姿态大仰角小仰角,可选择放飞时飞艇姿态加速抬头,尾部下顿仰角不变排气方式尾部集中排气分段排气升速/(m·s-1)5~102~5浮重比小大副气囊结构简单复杂加工工艺简单复杂压控简单复杂放飞形式复杂简单典型案例日本SPF⁃1美国HALE⁃D
5 结 论
通过对平流层飞艇在放飞过程中的动力学响应分析,结果表明:
1) 在单氦气囊结构形式的放飞过程中,飞艇受到的支撑点水平作用力持续增大,支撑点垂直作用力先增大后减小,在放飞后段飞艇尾部必将发生滑动,若采用硬连接方式限制尾部滑动,应充分考虑柔性艇尾的承载能力,确保柔性艇尾的安全。
2) 在多氦气囊结构形式的放飞过程中,放飞后升速从零开始剧烈波动后收敛较快,仰角变化剧烈,收敛较慢,飞艇以稳定升速升空后,仰角变化逐渐收敛。增大浮重比对飞艇仰角影响较小,但能显著增大稳定升速。
3) 通过两种氦气囊结构形式对比,其各有优缺点:采用单氦气囊结构形式浮重比较小,可以大仰角快速升空,但仰角变化不可逆不可控,放飞方式复杂;采用多氦气囊结构形式升空所需净浮力较大,仰角实时可控可调,压控与排气复杂,放飞方式简单。
4) 通过与飞行试验数据比较,本文方法能够满足工程应用需求,为平流层飞艇放飞方式的选择和评估提供了理论分析途径。根据平流层飞艇放飞场实际条件,可对后续的研究进一步细化或区分不同工况:地面风甚至非定常风对飞艇放飞的影响,飞艇行进中放飞动力学,以及将飞艇支撑点代以实际中的苫布或气垫等,这些分析都可基于本文的计算分析,进行部分方程或条件的增减而完成。
参考文献 (References)
[1] LIAO L,PASTERNAK I.A review of airship structural research and development[J].Progress in Aerospace Sciences,2009,45(4-5):83-96.
[2] STOCKBRIDGE C,CERUTI A,MARZOCCA P.Airship research and development in the areas of design,structures,dynamics and energy systems[J].International Journal of Aeronautical & Space Sciences,2012,13(2):170-187.
[3] WILSON J R.A new era for airships[J].Aerospace America,2004,42(5):27-31.
[4] STEVE S.The HiSentinel airship[C]∥7th AIAA Aviation Technology,Integration and Operations Conference.Reston:AIAA,2007.
[5] SMITH I,LEE M,FORTNEBERRY M,et al.HiSentinel80:Flight of a high altitude airship[C]∥11th AIAA Aviation Technology,Integration,and Operations Conference.Reston:AIAA,2011.
[6] Lockheed Martin Space System Company High altitude airship[EB/OL].(2014-11-10)[2017-04-13].http:∥www.lockheedmartin.com/us/products/lighter-than-air-vehicles.
[7] GAO.Future aerostat and airship investment decisions drive oversight and coordination needs:GAO-13-81[R].Washington,D.C.:GAO,2012.
[8] JAXA.Ground-to-stratosphere flight test and evaluation of materials and structure for stratospheric airship test vehicle:JAXA-RM-04-012[R].Tokyo:JAXA,2004:7-35.
[9] SHUNICHI O,NOBORU S.R&D status of RFC technology for SPF airship in Japan[C]∥9th Annual International Energy Conversion Engineering Conference.Reston:AIAA,2011.
[10] SELBY C.High altitude airship station keeping and launch model development using output from numerical weather prediction models[D].West Lafayette:Purdue University,2008.
[11] 赵攀峰,王永林,刘传超.平流层飞艇放飞、回收过程初步分析[J].航空科学技术,2007(4):24-29.
ZHAO P F,WANG Y L,LIU C C.Preparatory analyse on the release and recovery course of stratosphere airship[J].Aeronautical Science and Technology,2007(4):24-29(in Chinese).
[12] 郭虓,祝明,武哲.综合热力学模型的平流层飞艇上升轨迹优化[J].北京航空航天大学学报,2012,38(10):1346-1351.
GUO X,ZHU M,WU Z.Ascent trajectory optimization for stratospheric airships with thermal effects[J].Journal of Beijing University of Aeronautics and Astronautics,2012,38(10):1346-1351(in Chinese).
[13] 吴雷,李勇,梁栋.平流层飞艇放飞段动力学建模[C]∥第25届中国控制会议,2006:546-550.
WU L,LI Y,LIANG D.Dynamics modeling on the launch process for a stratospheric airship[C]∥Proceeding of the 25th Chinese Control Conference,2006:546-550(in Chinese).
[14] BLACKINGTON E.United States air force,schriever air force base:AIAA-2003-6005[R].Reston:AIAA,2003.
[15] 周江华.平流层飞艇运动控制律与定点控制律设计[D].北京:中国科学院空间科学与应用中心,2009:22-26.
ZHOU J H.Control law design for motion control and station-keeping control of stratospheric platform airship[D].Beijing:Center for Space Science and Applied Research,Chinese Academy of Sciences,2009:22-26(in Chinese).
[16] CUI Y X,YANG Y C,ZHOU J H,et al.Numerical aerodynamic investigations on stratospheric airships of different tail configurations[C]∥IEEE Aerospace Conference.Piscataway,NJ:IEEE Press,2015:3-4.
[17] KHOURY G,GILLELT J.Airship technology[M].Cambridge:Cambridge University Press,1999:20-23.
[18] LI Y W,NATHON M.Modeling and simulation of airship dynamics[J].Journal of Guidance,Control,and Dynamics,2007,30(6):1691-1700.
[19] 张泰华,姜鲁华,张冬辉,等.临近空间飞艇艇库外约束及稳定性分析[J].中国空间科学技术,2016,36(5):72-80.
ZHANG T H,JIANG L H,ZHANG D H,et al.Constraint and stability analysis of near space airship outside hangar[J].Chinese Space Science and Technology,2016,36(5):72-80(in Chinese).
猜你喜欢
船舶与海洋工程(2022年6期)2023-01-12 07:54:02
成都信息工程大学学报(2022年4期)2022-11-18 07:31:56
舰船科学技术(2022年10期)2022-06-17 06:25:14
北京航空航天大学学报(2022年5期)2022-06-06 09:26:48
中国舰船研究(2022年2期)2022-04-26 07:51:20
中国舰船研究(2016年6期)2016-12-12 02:35:26
高原山地气象研究(2016年1期)2016-11-10 06:05:53
太空探索(2016年12期)2016-07-18 11:13:43
百科探秘·航空航天(2015年12期)2015-11-07 07:05:52
百科探秘·航空航天(2015年12期)2015-11-07 07:05:51