BDS/GPS组合导航接收机自主完好性监测算法
2018-05-04 00:46王尔申杨福霞庞涛曲萍萍蓝晓宇姜毅
北京航空航天大学学报 2018年4期
王尔申, 杨福霞, 庞涛, 曲萍萍, 蓝晓宇, 姜毅
(1. 沈阳航空航天大学 电子信息工程学院, 沈阳 110136; 2. 大连海事大学 信息科学技术学院, 大连 116026)
接收机自主完好性监测(RAIM)算法源于民航用户对卫星导航系统可靠性的苛刻要求[1]。目前,卫星导航完好性监测技术主要有3种:卫星自主完好性监测(SAIM)、利用接收机内部冗余信息的RAIM和外部辅助增强系统[2]。相对于其他2种完好性监测技术,RAIM是利用接收机的超定解对卫星测量值进行一致性校验的技术,其更能保证用户对告警时间的要求。早期的RAIM算法大多基于GPS单星座,可以满足民航航路到非精密进近阶段的完好性要求。目前,全球卫星导航系统(GNSS)发展为多星座多频点,参与定位的卫星成倍增加,接收机具有更多的冗余观测信息,可有效地减少RAIM空洞,也使RAIM技术可应用于一些对完好性性能要求更高的应用,如民航飞行中垂直引导进近(APV)Ⅰ、Ⅱ等阶段。
多星座RAIM算法是指使用2个或2个以上的卫星导航系统的冗余观测信息进行一致性校验,以检测和识别故障。单星座系统中至少观测到5颗卫星才能进行故障检测,考虑到不同星座的时间系统之间的偏差,对于多星座需要更多冗余观测量才能进行故障检测。文献[3]对RAIM的可用性预测进行了分析。文献[4-6]提出了针对多系统多故障情况下的完好性监测算法,其中文献[4]对GPS/Galileo/GLONASS组合导航在APV-Ⅰ、APV-Ⅱ阶段利用RAIM算法进行了分析。Ene等[7-8]分析了GPS/Galileo组合导航在APV阶段的RAIM可用性。文献[9]对GPS/Galileo组合导航RAIM算法中的截止高度角、用户等效距离误差等问题进行了分析。徐君毅等[10]对APV阶段的垂直保护水平在全球的分布情况进行了研究。Lee等[11]提出了最优加权平均解(OWAS)算法,国内的研究人员也对此算法进行了扩展,郭靖等[12]采用新的分组方法,满足双星座双故障的应用场景,王式太[13]设计了基于M估计的RAIM粗差探测和剔除算法。其中,OWAS算法能够方便地兼容不同的星座,避免了不同系统间时间系统、坐标系统转换带来的误差影响,具有处理速度快、可用性高的特点,因此,本文采用OWAS算法对BDS/GPS组合导航应用于APV阶段进行了研究。
OWAS算法是将卫星按星座分为2组,监测同时发生在同一星座中的多星故障,但此算法不能有效地对双星座同时发生故障进行检测。本文采用OWAS算法,通过优化加权因子,提高算法的可用性,并对OWAS算法进行了改进。通过实测数据验证了OWAS算法对APV阶段的可用性和双星座双故障的检测。
1 OWAS RAIM算法
OWAS RAIM算法原理如图1所示。
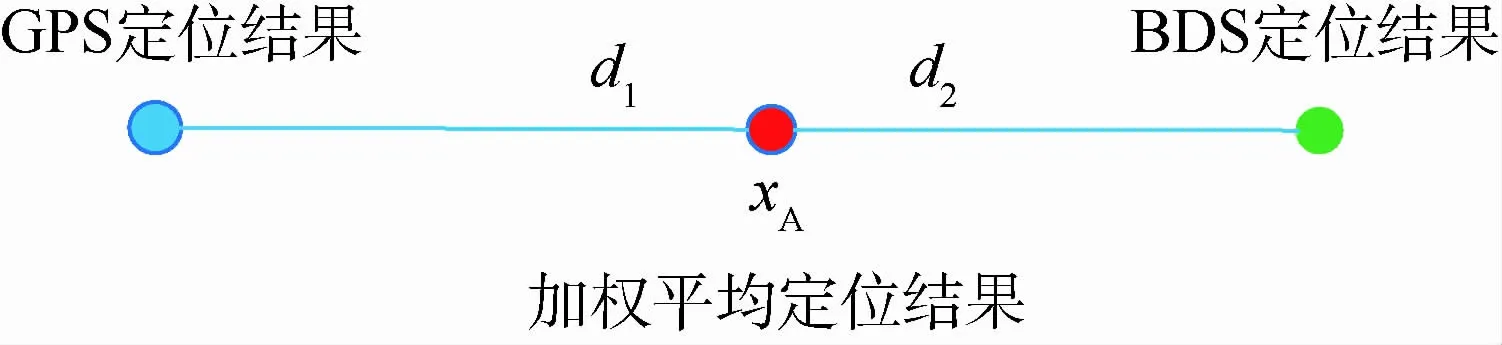
图1 OWAS RAIM算法原理Fig.1 OWAS RAIM algorithm principle
加权平均后的定位结果为
xA=rx1+(1-r)x2
(1)
式中:加权因子0≤r≤1;xn(n=1,2)分别为BDS和GPS的定位结果。
图1中:dn(n=1,2)分别为xn与xA的间隔距离。对于加权平均解,要求以0.999的概率满足:xA-x≤xA-xn+xn-x≤T+an。其中:T(n=1,2)为检验门限,an为无故障假设条件下定位误差上限。所以,无故障卫星时,每个导航系统内的保护水平为:PLn=T+an,PL=max(PL1,PL2)。OWAS算法在只考虑垂直方向上的定位精度与完好性要求时,可以归纳为如下问题:
min(max(VPL1,VPL2))
(2)
式中:VPL为垂直保护级别。
同时,满足以下条件时,RAIM算法可用:
σV≤σV-max
(3)
dmajor≤dmajor-max
(4)
VPL≤VAL
(5)
HPL≤HAL
(6)
式中:σV为垂直方向上的定位误差标准差;σV-max为垂直方向上的定位误差标准差的最大值;dmajor为最终定位解水平方向上的定位误差标准差;dmajor-max为飞行阶段规定的95%水平方向上的定位误差标准差的最大值;VAL为垂直保护门限;HPL为水平保护级别;HAL为水平保护门限[10]。
σV和dmajor的标准由以下2个操作需求推导:
1) 95%的导航系统误差(Navigation System Errors,NSE)边界:1.96σV=4 m,1.96dmajor=16 m(1.96对应于高斯分布假设的95%分布)。
2) NSE边界满足无故障条件完好性可用性时:KVσV≤VAL(垂直方向),KHdmajor≤HAL(水平方向),当Pr{HMI}=10-8/approach(Pr为概率,HMI为危险误导信息,approach为进近)时,KV=5.73,KH=6.47[10]。
σV-max和dmajor-max的值分别为
σV-max=min(4 m/1.96,VAL/KV)
dmajor-max=min(16 m/1.96,HAL/KH)
1.1 协方差矩阵
OWAS算法为
rx1+(1-r)x2
(7)
OWAS算法的位置误差与加权因子的关系如下:
ΔxA=rΔx1+(1-r)Δx2
(8)
式中:Δx1为GPS定位解与真实位置之间的误差;Δx2为BDS定位解与真实位置之间的误差;ΔxA为最终加权平均定位解与真实位置之间的误差。
加权最小二乘定位解的位置误差[14]表达式如下:
(9)
(10)
式中:G为伪距误差与接收机位置及钟差的关联矩阵;W为加权矩阵;ΔR为伪距误差矢量;Pn为定位误差的协方差矩阵(n=1,2分别表示GPS和BDS)。
最优解和各导航系统定位解误差互相关表达式如下:
(11)
(12)

(13)
(14)

(15)
(16)
同理,加权平均解xA的定位误差协方差矩阵PA如下:
(17)
协方差矩阵Jn为
Jn≡E((Δxn-ΔxA)(Δxn-ΔxA)T)=
(18)
将式(10)、式(11)、式(15)、式(17)代入式(18)中,可得
J1=(1-r)2(P1+P2)=(1-r)2PS
(19)
式中:PS=P1+P2。
同理
J2=E((Δx2-ΔxA)(Δx2-ΔxA)T)=
r2(P1+P2)=r2PS
(20)
1.1.1 加权因子确定保护级别
令
(21)
Kmd≡Q-1(Pmd)
(22)
式中:Q-1为标准单边累加分布函数的逆函数;Pfd为虚警率(参考国际民航不同进近阶段导航性能要求,虚警率与连续性保持一致。虚警率除以4是因为总的允许虚警率在垂直和水平方向上平均分配[10]);Pmd为最大允许漏警率(完好性风险等于漏警率与卫星故障率的乘积)。
令
(23)
(24)
(25)
由式(19)和式(20)可以得出
(1-r)σV,S
(26)
(27)
VPL1和VPL2分别为
VPL1=TV,1+aV,1=KfdσdV,1+KmdσV,1=
Kfd(1-r)σV,S+KmdσV,1
(28)
VPL2=TV,2+aV,2=KfdσdV,2+KmdσV,2=
KfdrσV,S+KmdσV,2
(29)
由图2可以看出,VPL1是加权因子的一元线性递减函数;VPL2是加权因子的一元线性递增函数。在OWAS算法中,VPL=max(VPL1,VPL2),当VPL1=VPL2时,得到最小化的VPL,此时可得
(30)
(31)
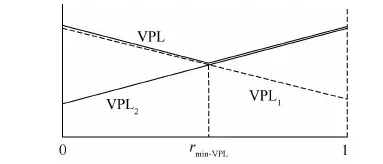
图2 VPL1、VPL2与加权因子的函数Fig.2 VPL1 and VPL2 as a function of weight factor
1.1.2 加权因子确定误差精度σV和dmajor
σV和dmajor为
(32)
(33)
由式(3)、式(4)可知,RAIM算法可用要满足:
σV≤σV-max
dmajor≤dmajor-max
1.1.3 确定最优加权因子
OWAS最重要的是在降低保护水平的条件下满足精度的要求。
如图3所示,rmin-VPL表示垂直保护水平最小时的加权因子,但此时不满足σV的标准,而rmin-σV满足最小化σV,却不满足VPL≤VAL,rbest-int表示在保证精度要求下修正加权因子rmin-VPL来最小化VPL,rbest-acc表示通过修正最小化精度加权因子σV保证可用性的要求。
APV飞行阶段时需更大可能的保证算法的可用性,故采用rbest-int作为最终加权因子,则
(34)
图3 加权因子的计算Fig.3 Determination of weight factor
式(23)和式(24)代入到式(34)中,可得
(35)
由式(35)计算可得2个解,如下:
(36)
(37)
由于r1≤r≤r2,且0≤r≤1,所以
racc,min≤r≤racc,max
(38)
式中:racc,min=max(r1,0);racc,max=min(r2,1)。
当racc,min≤rmin-VPL≤racc,max时,加权因子r如下:
r=rmin-VPL
(39)
当rmin-VPL≤racc,min时,加权因子r如下:
r=racc,min
(40)
当racc,max≤rmin-VPL时,加权因子r如下:
r=racc,max
(41)
1.2 故障检测与识别
OWAS RAIM算法是以GPS、BDS到xA的距离作为故障检测的检验统计量[15-16],按照国际民航组织(ICAO)要求的性能标准得到检验门限。当双星座同时出现故障时,2个检验统计量均会在故障产生的时刻超过检验门限。当单星座产生故障时,故障星座的定位解使得OWAS与无故障星座的距离增加,容易产生误警,此时采用加权最小二乘残差的故障检测对OWAS定位域的故障检测进行辅助,完成单星座故障的检测。
1.2.1 故障检测
GNSS伪距观测线性化方程为
ΔR=Gx+ε
(42)
式中:ε为观测噪声矢量。
对式(42)运用加权最小二乘法求解,得到的解为
xwls=(GTWG)-1GTWΔR=BΔR
(43)
式中:B=(GTWG)-1GTW。
伪距残差矢量v为
v=ΔR-Gxwls=
(In-G(GTWG)-1GTW)ΔR=CΔR
(44)
矩阵C的协因数矩阵为
Q=W-1-G(GTWG)-1GT
伪距残差平方和为
SSEWLS=vTv=ΔRTWΔR
(45)

1) 无故障假设H0:E(ε)=0,则SSEWLS~χ2(n-4)。
2) 有故障假设H1:E(ε)≠0,则SSEWLS~χ2(λ,n-4)。

(46)
由式(46)可以解得tWLS值。
1.2.2 故障识别
根据残差和观测误差的关系式,定义故障识别的检验统计量为
(47)
式中:i=1,2,…,n,并且n为可见卫星数目;vi为利用加权最小二乘法求得的伪距残差;Qii为矩阵Q的第i行第i列;di~N(0,1)。
对统计量di做二元假设:
1)H0(无故障):E(εi)=0,则di~N(0,1)。
2)H1(有故障):E(εi)≠0,则di~N(δi,1)。
其中,δi为统计量偏移参数。给定总体的误警率PFA,可计算出对应的检验门限T1WLS。计算如下:
(48)
由式(48)可解得门限值T1WLS。
2 算法验证与结果分析
采用IGS(International GPS Service)2016年7月31日0时的BDS、GPS系统RINEX数据对本文算法进行仿真验证。
在GPS可见星中的第16颗卫星、BDS可见星中的第7颗卫星中,分别在500~900 s时刻人为加入30、50、70 m伪距偏差。
图4(a)、(b)分别为未加伪距偏差时GPS和BDS的垂向定位域检验统计量。图5(a)、 (b)分别为在500 s开始加入30、50、70 m伪距偏差时GPS、BDS的检验统计量。可知,当加入伪距偏差时,检验统计量值会发生跳变;未加入伪距偏差时,检验统计量值波动较小。
图4 BDS/GPS未加入伪距偏差的检验统计量Fig.4 BDS/GPS test statistics with no pseudo-range bias
图5 BDS/GPS加入不同伪距偏差的检验统计量Fig.5 BDS/GPS test statistics with different pseudo-range bias
双故障卫星检测结果如图6所示。
由图6可知,在GPS和BDS系统的第16颗卫星和第7颗卫星中加入50 m伪距偏差,检验统计量大于检验门限,可以对故障进行检测。
双星座双故障算法识别率结果如图7所示。可知,当伪距偏差值较小时,不能识别出故障卫星;当故障卫星伪距偏差在30 m以上时,BDS/GPS能识别全部故障。
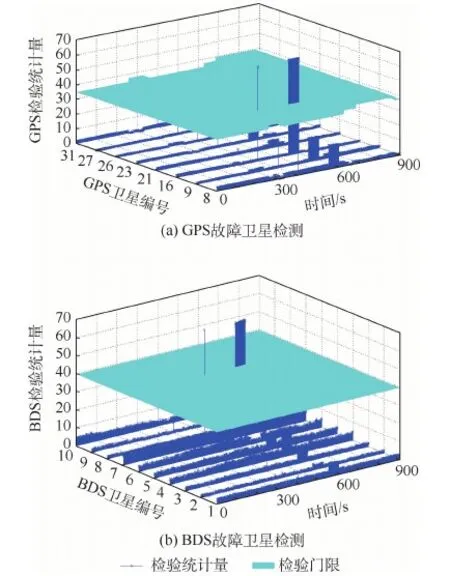
图6 BDS/GPS故障卫星检测Fig.6 BDS fault satellite detection
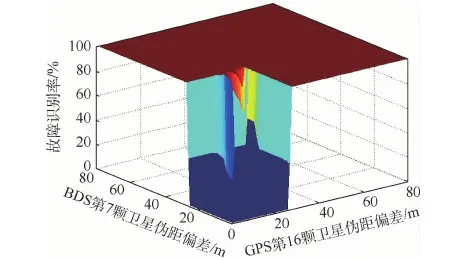
图7 故障识别率Fig.7 Fault identification rate
3 结 论
本文研究了一种BDS/GPS组合导航RAIM算法,对算法进行了详细的理论分析,并利用IGS网站数据对算法进行验证。
1) 本文算法对BDS/GPS双卫星故障检测与识别是可用的。
2) 当伪距偏差在30 m以上时可有效地检测与识别。
研究结果对多星座组合导航接收机自主完好性监测算法研究有一定的参考价值。
参考文献 (References)
[1] BROCARD P,JULIEN O,MABILLEAU M.Autonomous inte-grity monitoring proposal for critical rail applications[C]∥Proceedings of the 28th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION,2015:706-734.
[2] 徐肖豪,杨传森,刘瑞华.GNSS用户端自主完好性监测研究综述[J].航空学报,2013,34(3):451-463.
XU X H,YANG C S,LIU R H.Review and prospect of GNSS receiver autonomous integrity monitoring[J].Acta Aeronautica et Astronautica Sinica,2013,34(3):451-463(in Chinese).
[3] 吕宗平,倪育德,陈君,等.基于MHSS算法的ARAIM完好性和可用性预测[J].中国空间科学技术,2017,37(1):41-48.
LYU Z P,NI Y D,CHEN J, et al.Prediction of ARAIM integrity and availability based on MHSS algorithm[J].Chinese Space Science and Techonlogy,2017,37(1):41-48(in Chinese).
[4] HEWITSON S,WANG J L.GNSS receiver autonomous integrity monitoring (RAIM) performance analysis[J].GPS Solutions, 2006,10(3):155-170.
[5] OBER P B,HARRIMAN D.On the use of multi-constellation-RAIM for aircraft approaches[C]∥Proceedings of the 19th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION,2006:2587-2596.
[6] 蒋虎,袁运斌,王海涛,等.精密进近阶段的多系统GNSS组合RAIM可用性算法及分析[J].中国空间科学技术,2016,36(3):32-40.
JIANG H,YUAN Y B,WANG H T, et al.Multi-GNSS RAIM availability algorithms and analysis for precise approach[J].Chinese Space Science and Technology,2016,36(3):32-40(in Chinese).
[7] ENE A.Further development of Galileo-GPS RAIM for vertical guidance[C]∥Proceedings of the 19th International Technical Mceting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION, 2006:2597-2607.
[8] ENE A,BLANCH J,WALTER T.Galileo-GPS RAIM for verti-cal guidance[C]∥Proceedings of the 2006 National Technical Meeting of the Institute of Navigation.Washington,D.C.:ION, 2006:432-440.
[9] MARTINEAU A,MACABIAU C,MABILLEAU M.GNSS RAIM assumptions for vertically guided approaches[C]∥Proceedings of the 22nd International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION, 2009:2791-2803.
[10] 徐君毅,杨元喜,李金龙,等.COMPASS与其他GNSS组合导航完好性分析[J].中国科学:地球科学,2013, 43(10):1632-1642.
XU J Y,YANG Y X,LI J L,et al.Integrity analysis of COMPASS and other GNSS combined navigation[J].Science China:Earth Sciences,2013,43(10):1632-1642(in Chinese).
[11] LEE Y C, BRAFF R,FERNOW J P, et al.GPS and Galileo with RAIM or WAAS for vertically guided approaches[C]∥Proceedings of the 18th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION,2005:1801-1825.
[12] 郭靖,崔晓伟,陆明泉,等.支持垂直引导进近的多星座RAIM算法[J].清华大学学报(自然科学版),2011,52(2):157-160.
GUO J, CUI X W, LU M Q, et al.Multi-constellation RAIM for approach with vertical guidance[J].Journal of Tsinghua University(Science and Technology),2011,52(2):157-160(in Chinese).
[13] 王式太.基于M估计的GNSS 接收机自主完好性监测研究[D].北京:中国地质大学,2017:157-160.
WANG S T.Multi-constellation RAIM for approach with vertical guidance[D].Beijing:China University of Geosciences,2017:157-160(in Chinese).
[14] LEE Y C.Investigation of extending receiver autonomous integrity monitoring (RAIM) to combined use of Galileo and modernized GPS[C]∥Proceedings of the 17th International Technical Meeting of the Satellite Division of the Institute of Navigation.Washington,D.C.:ION, 2004:1691-1698.
[15] HWANG P Y,BROWN R G.RAIM-FDE revisited:A new breakthrough in availability performance with NIORAIM(novel integrity-optimized RAIM)[J].Navigation,2006,53(1):41-51.
[16] KAPLAN E,HEGARTY C.Understanding GPS:Principles and application[M].2nd ed.Boston:Artech House,2006:39-45.
猜你喜欢
地理空间信息(2022年10期)2022-10-31
仪器仪表用户(2022年6期)2022-06-06
现代计算机(2021年14期)2021-11-20
导航定位学报(2021年5期)2021-10-13
导航定位与授时(2021年3期)2021-05-18
导航定位学报(2021年2期)2021-04-22
中国科技纵横(2020年24期)2020-11-28
健康女性(2017年3期)2017-04-27
儿童故事画报(2016年5期)2017-02-07
都市丽人(2016年12期)2016-12-14