自差式毫米波多普勒引信的测试系统设计
2018-04-26 05:00蔡斌杰
微型电脑应用 2018年4期
蔡斌杰
(浙江长征职业技术学院,杭州 310023)
0 引言
引信作为探测对象的时间、指令信息,配备在对于所探测的对象有直接接触的一类弹药武器之上,运用于各类炮弹、各种型号水雷、以及各色的火箭弹等武器上[1]。通过对于待执行操作目标的检测,可以识别且推知出大量与待感知对象的信息、能量,这些特征包括所测返回波的弹目交会距离和角度、击毁物参数、对应的速度和频率等[2-3]。通过这些可以判断出系统适应周围环境的情况,同时引入无线通信领域的传输技术,以保证整个测试工作的顺利进行。引信在整个武器弹药开发中占据着重要地位,同时测试也贯穿于引信理论、电子对抗、实验试制、设计等工作过程中[4-5]。总之,引信技术是不局限于传统测量形式的包含信号各类处理、传输、识别和存储等功能的多元综合技术。
而自差毫米波的超低空和抗干扰优良性能使其应用到可装备部队的各类武器,包括机载探测器、火控雷达,应用于靶场、防空、导弹等多领域承担相应的测量、监控、防撞击等功能[6-8]。这样穿透力强,较少干扰杂波的毫米波技术,对环境适应力强。未来对于攻击目标采取精准的损毁和破坏是不可缺少的,这是需要较为可靠的引信控制,利用毫米波的特性来探知待测目标的特征。国外在这方面很早就开始了研究,陆续提出一系列测试方面的进步,包括引线传输信号、存储测试、非易失电子以及弹载记录等方法和原理。国内对此研究开始的较晚,但也稳步演进,从上世纪的缺点较为明显的弹丸参数测试、存储遥测、针对终点弹道的存储测试、动态存储测试到现如今的测试动态化、智能化,成果较多的用于弹体空中控制以及爆炸抛洒的加速度、角速度测试[9-11]。但是这些对于毫米波引信所做的工作侧重于测试设备和系统设计本身,对于实际的弹载环境的分析和实验不多。因此本文对这方面的研究空缺进行了补充。设计了一种自差式毫米波测试系统用于实测,并对实际环境测量的结果进行分析。
1 自差式毫米波原理
毫米波探测原理是在搜索空中物体目标时利用多普勒这一效用,即完全自差式的方式[12]。待检测对象与搜索的工具之间的相对位移即使通常所述的频移。同时,经过信号处理器作用之后,可以获知探测前来攻击对象的相对速度,提前对于来袭的攻击对象做出实时的防御[13]。该系统构造简单,利用一些降噪的设计可以在功率不变的情况下提高对应机器的灵敏度。该系统可以进行一些必要的操作使得返回的波形能够被探测到。这些幅值特别小的波形一方面很难满足A/D模数器件的接受要求,另一方面是由于过低的信噪比而无法进行采样输入。因此,自差式毫米波设备需要能够对探测到的返回波形进行放大以增大其幅值。8 mm波段的设备的工作原理[15],如图1所示。
图1 自差式毫米波工作原理
2 系统设计
在上述原理的基础上,设计了以下自差毫米波的引信测试系统,根据所需的主要的功能相对应的构建了如下几个模块,设计的系统包括了电源管理以及信号的处理、采集、控制、存储等一系列功能,如图2所示。
图2 系统整体设计
2.1 信号调理功能模块
该模块实现的主要功能是对输入的信号进行整形调整得到系统其他接口相匹配的形式。与之有关的信号有多种形式以适应不同的功能。第一种是与落地功能有关的信号,通过该信号可以获知炮弹落地的准确时间。第二种是多普勒信号,这是系统主要接收存储的信号,通过分析可以得出整个测试的弹载下的动态功能。第三种是电源信号,本文中采取的为15 V标准的,在整个系统中执行激励其他模块,保证上电正常延时功能,在系统中有不可或缺的功能。
2.2 采存功能模块
该模块是核心功能负责所需数据的存储、采集。上述所列出的该模块除了基本功能外还包括了控制功能。采集信息的元件是由A /D模数转换器构成。该器件应用于模电和数电信息的转换,型号为12 bit的AD7492。在该模块的支持下,其余的存储和控制部分才能够有序的进行。需要重点强调的是,炮弹落地形成较大的速度促使抗冲击能力这一功能有较好的完善和改进。因此运用了存储稳定的FLASH闪存,防止因为不可控因素而影响测试工作。因此选取的型号是K9W 8G08U 1M版本的存储器。由图所示采取的双闪存的方式实现了较高的采样速率。最后利用CPLD(复杂可编程逻辑器件)进行各类总线的连接配合单片机实现完成逻辑、时序等方面的控制。上述模块,具体如图3所示。
2.3 延时控制和电源管理模块
考虑到实际情况中,毫米波设备没有充足的电力供应保证其能够在整个弹道进行测试,所以需要设定一个延时来对电源的开启和结束进行相对应的控制,保证整个实验能够在
图3 采存模块组成框图
得到恰当的电力供应。研究员在设置实验弹的过程中,需要根据飞行时间结合系统可以提供的时间进行调配。本文就根据不同的射程设定的情况1和情况2的不同的延时、记录时间。而对于电源管理则保证了整个测试过程中的功耗在有限供应点量情况下的较小,以完成一整套测试过程。保证系统能够上电采集数据以及数据保持读取以及待触发状态的两者的任意切换。
3 具体工作过程
该系统是在一定的电源管理规则下构建起来的,所以在具体测试方面也细化成了以下几个互相依赖又相互独立的状态进行相应的协作配合。在具体细化的工作状态以及对应的功能和变换所需条件,如表1所示。
表1 实验测试工作状态特性
具体流程,如图4所示。
图4 系统工作状态转换过程
在第一个状态休眠阶段结束之后,可以设定延时时间,其范围最高限度为255秒。延时完毕之前的待触发状态可以进行装弹的准备工作。待延时后可为引信的毫米波发射提供15 v的电源功率消耗,发送探测信号。之后进行数据采集工作完成相应模块的上电过程,此时指示灯给予相应的变化。之后整个系统保持耗能较低的状态,等待之前存储的数据拷贝完毕之后结束测试。
4 试验过程及分析
初步设计完该系统且进行了一些基本的仿真测试之后,在某地的靶场的炮弹进行了相关的实际的验证工作,根据实际测量的多种弹道数据进行分析,毫米波引信测试,如表2所示。
表2 实验测试弹数据
fd=2v/λ
(1)
实验测试弹数据,分别为弹道情况1的多普勒信号的描述以及对应的频谱分析图,如图5和图6所示。

图5 情况1信号测试曲线
图6 情况1测试对应频谱
两图所展现的均是有效的曲线段。图6内从落地开始计时,其中的粗线表示的是落地一瞬间的信号高电平转为相反的情况。从图6内可判断出主频为70 kHz,根据上述式(1)即多普勒频移的公式[16]表述可知,通过对应的落速、波长可计算出其频率的范围。(波长为7 mm-10 mm对应的fd为65.2-93.1 kHz)。为情况2对应的信号的有效范围和频谱,如图7、图8所示。通过式(1)也可进行相应的fd(计算得到61.8 kHz到88. 3 kHz)。从图中可以得出其主频为89 kHz。上述两者均可证明上述两者均是毫米波引信返回的信号。
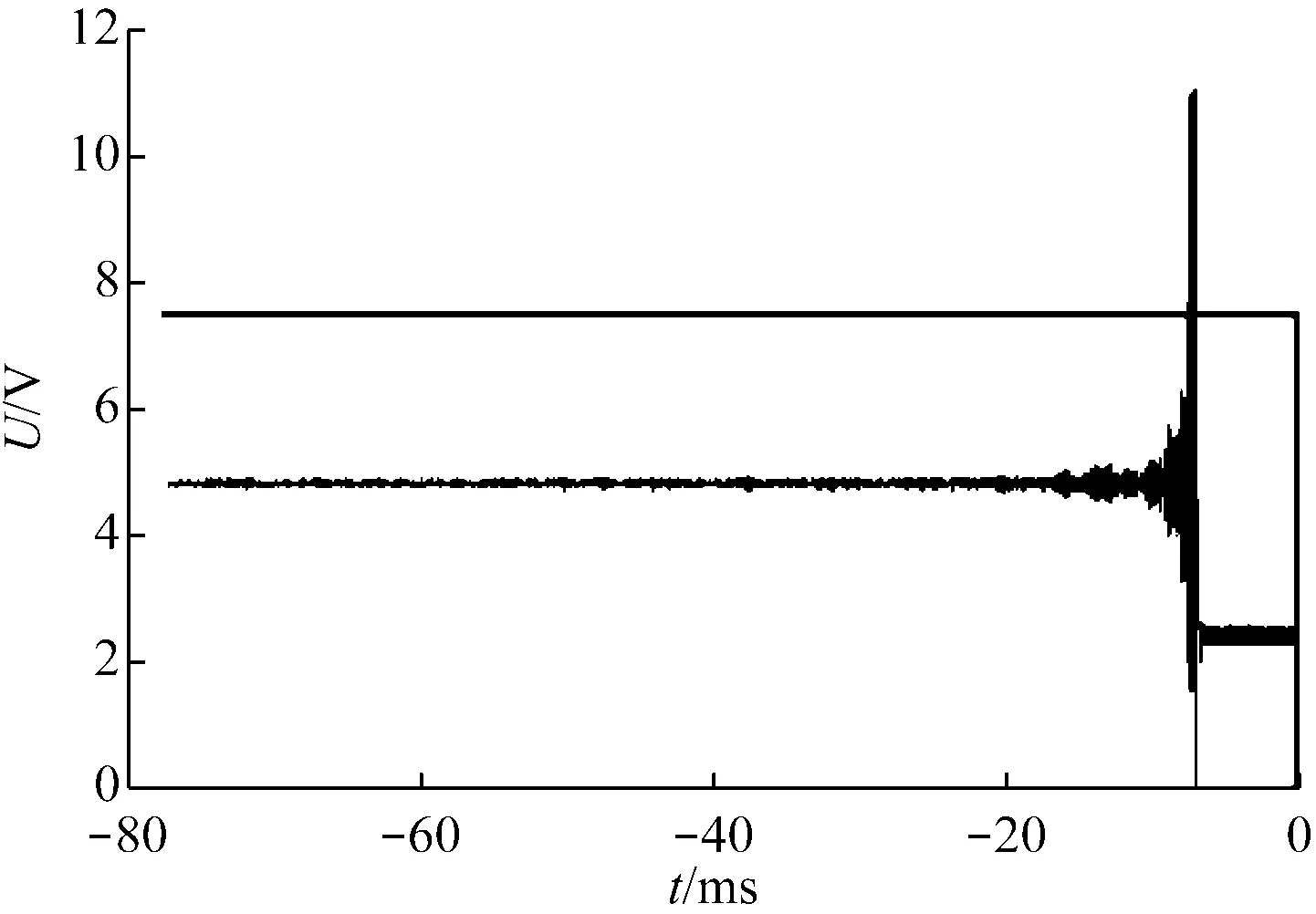
图7 情况2信号测试曲线
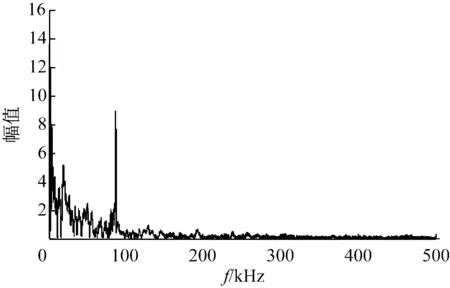
图8 情况2测试对应频谱
在弹道情况1和情况2下的各项指标,如表3所示。

表3 落地前信号数据
其结果均是通过具体的展开图和幅度图得出。情况1在落地前6 ms时刻的各项指标,如图9、图10所示。
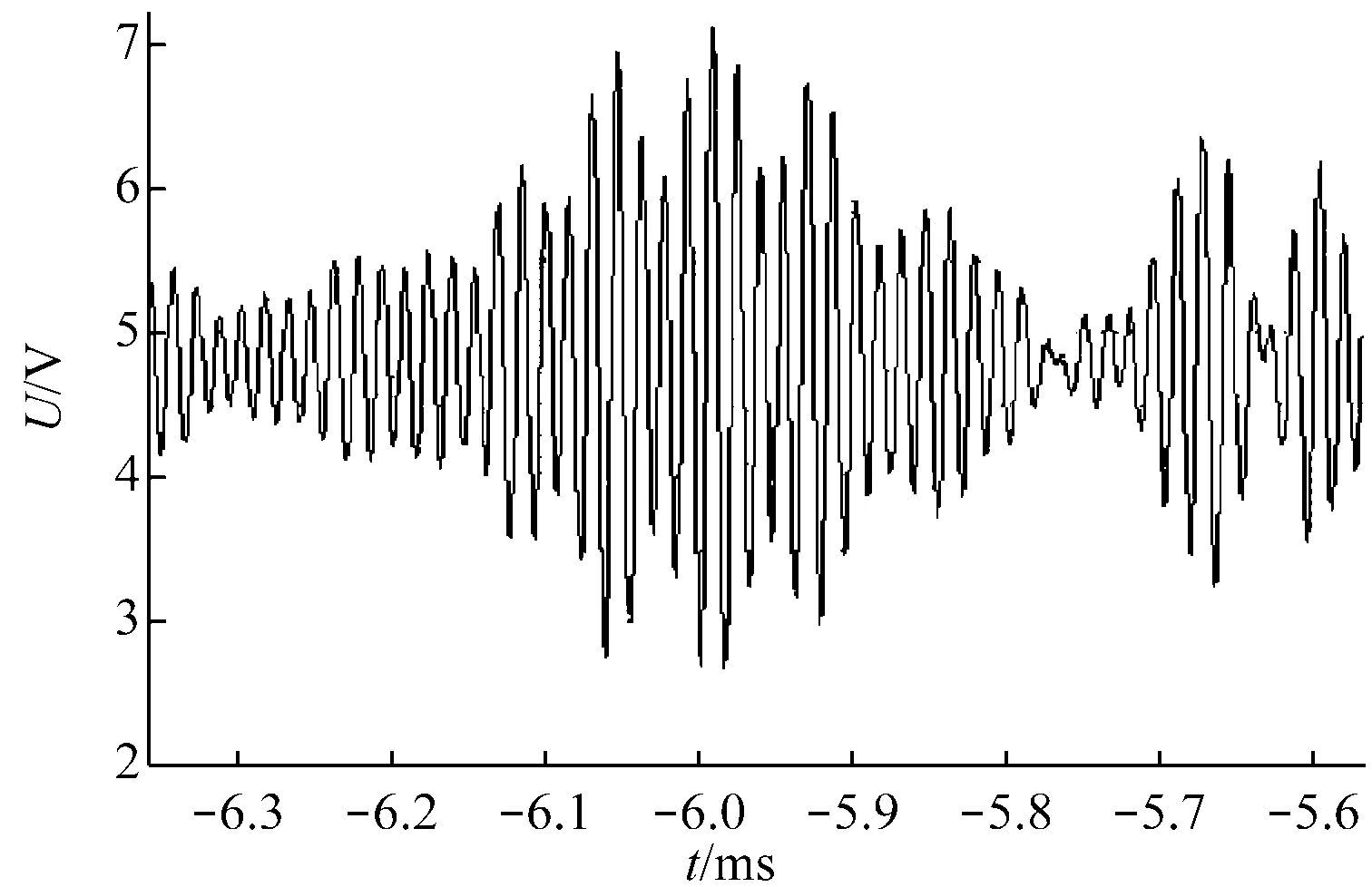
图9 情况1在6 ms时刻展开图
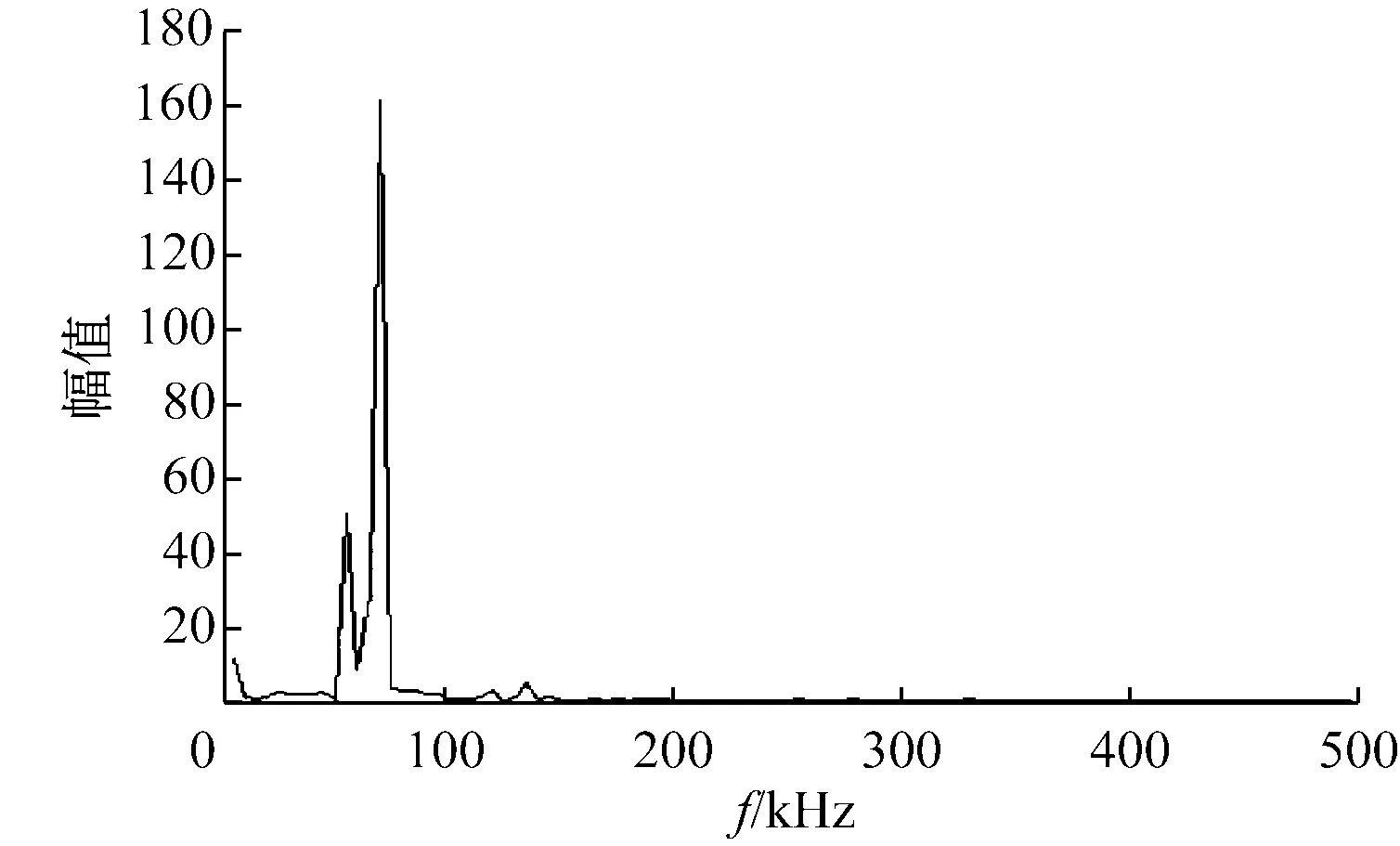
图10 情况1在6 ms时刻频谱
可以得出结论多普勒信号是呈现波动增幅的情况。对应的情况2对应的结果图,如图11、图12所示。图11、图12表示落地前10 ms以及这一时刻的状态情况。
5 总结
本文在介绍自差式毫米波的工作原理的基础上,设计一整套测试系统用于自差式毫米波的多普勒引信,简化测试系统的搭配元件,降低成本的同时也使得功率消耗得以降低。进一步进行了相应的弹载测试实验,得到了两种不同类型的多普勒信号。对于两种不同情况分别求得其波动增幅的多普勒信号。对图像结果进行分析,观察其信号的主要频率符合基本的多普勒公式,为后续总结规律的过程做了必要的准备。整个测试表明设计的系统满足实时、准确、动态得出利用毫米波引信得到的回波信号,返回信号在分辨率等特性上符合弹载测试的标准。
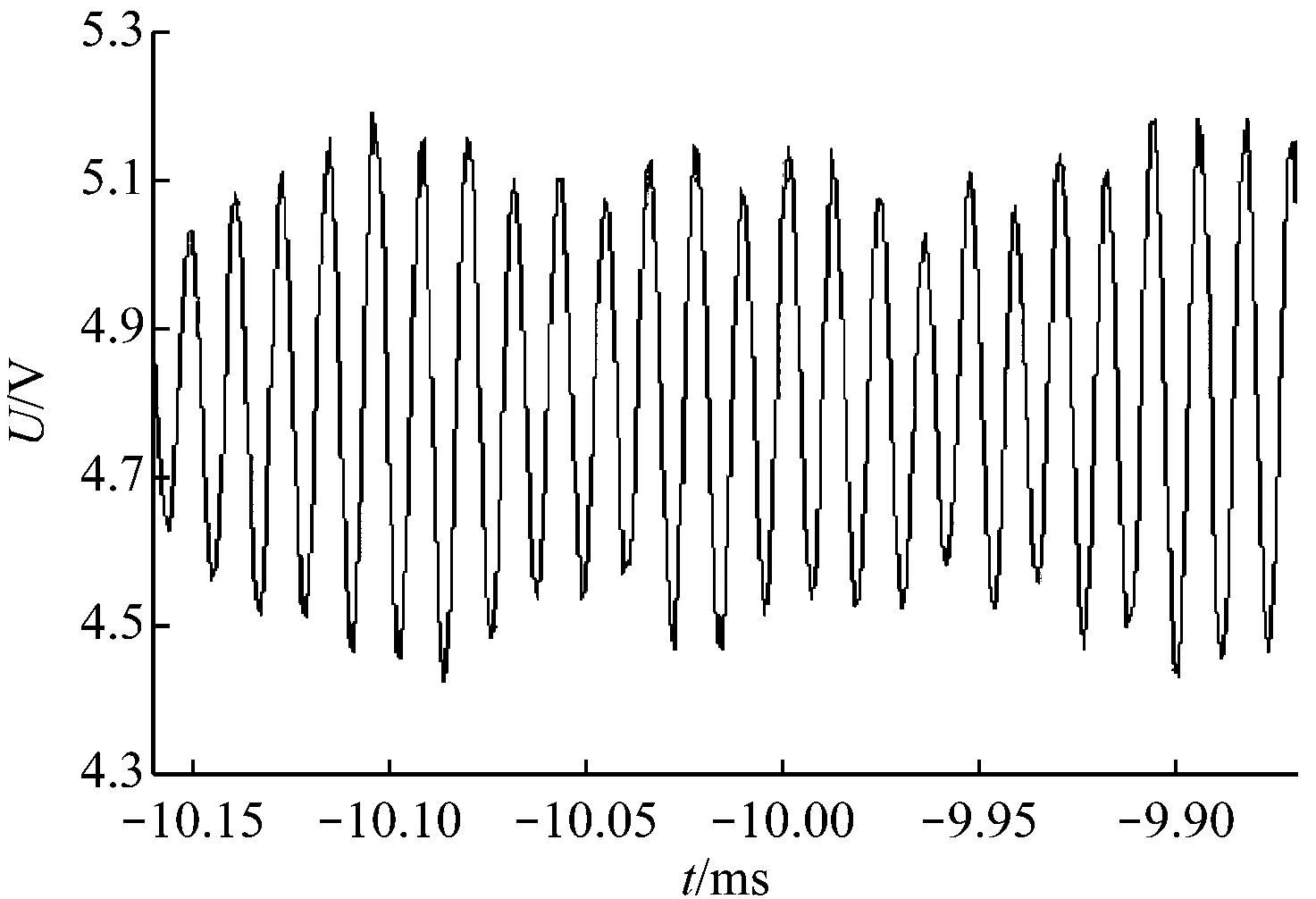
图11 情况2在10ms时刻展开图
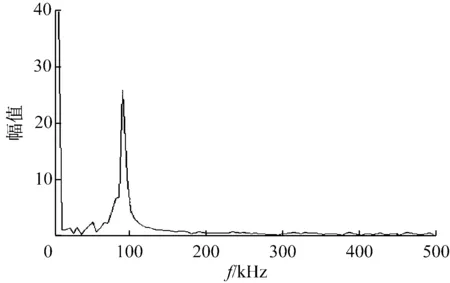
图12 情况2在10 ms时刻频谱
[1] 方荣新,李跃华. 弹载3 mm与8 mm辐射计定位性能分析[J]. 微波学报,2015(S2):186-189.
[2] 饶蕾,郑健,李志豪. 近场被动式毫米波成像准光路系统设计[J]. 浙江大学学报(理学版),2016(3):310-315.
[3] 吴茂林,吴向臣,周在龙. 基于ARM+FPGA的引信
信息测试系统设计与实现[J]. 电子技术应用,2015(8):24-26.
[4] 姜景伟,李国林,周鹏飞. 某型引信自动测试系统接口适配器的设计[J]. 四川兵工学报,2015(4):25-28.
[5] 王辉辉,付学斌,张珂. 毫米波近炸引信数字化信号处理器[J]. 探测与控制学报,2014(5):34-37.
[6] 王永亮,陆建兵,严勇,吴海军. 8 mm毫米波测云雷达系统设计[J]. 现代雷达,2014(7):14-17.
[7] 梁勇,赵河明,张恩愫. 基于单片机的多普勒信号测试系统的设计[J]. 制造业自动化,2014(3):133-135.
[8] 王新会,李楚宝,曹茜红. 基于短时傅里叶变换的毫米波引信地面目标识别[J]. 航空兵器,2012(3):25-28.
[9] 仲凌志,刘黎平,葛润生,等. 毫米波测云雷达的系统定标和探测能力研究[J]. 气象学报,2011(2):352-362.
[10] 陈墨,徐金平. 毫米波自差频CW系统发射漏波信号对接收灵敏度的影响[J]. 东南大学学报(自然科学版),2009(2):206-210.
[11] 曹黎明, 李耀波. 一种水下高速小目标回波频率估计方法[J]. 指挥控制与仿真, 2013, 35(5): 106-109.
[12] 刘浩,于劲松,张海杰,等. 基于半实物仿真的多普勒雷达测试系统设计[J]. 测控技术,2012(10):121-123.
[13] 王晓方,罗雷. 某型电子时间引信电参数综合测试系统设计[J]. 弹箭与制导学报,2010(6):112-115.
[14] 毕雪芹,王航宇,陈智利. 电子时间引信综合测试系统设计[J]. 科学技术与工程,2016(3):310-315.
[15] 苏志谋,简金蕾,任宏滨,等. 基于毫米波技术引制一体化设计[J]. 飞航导弹,2012(3):81-85.
[16] 谷雨桐,景华,司马涛,等. 一种毫米波引信低频预处理电路[J]. 弹箭与制导学报,2011(3):129-130.
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
成都信息工程大学学报(2022年3期)2022-07-21
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
北京航空航天大学学报(2021年9期)2021-11-02
小雪花·小学生快乐作文(2019年12期)2019-02-06
证券市场红周刊(2018年3期)2018-05-14
中外医疗(2016年15期)2016-12-01
中国继续医学教育(2015年5期)2016-01-07
小说月刊(2015年6期)2015-04-23
小天使·一年级语数英综合(2014年7期)2014-06-26