
基于PET算法的匝道合流区交通冲突识别模型
2018-04-26 08:05马艳丽祁首铭吴昊天范璐洋
交通运输系统工程与信息 2018年2期
马艳丽,祁首铭,吴昊天,范璐洋
(哈尔滨工业大学交通科学与工程学院,哈尔滨150090)
0 引言
目前采用的交通冲突定义是1977瑞典学者Hydén首次提出的:在可观测的条件下,两个或两个以上道路使用者在一定的空间和时间上相互接近到一定程度,以至于如果任何一方不改变其运动状态,就有发生碰撞危险的交通现象[1].据统计,我国高速公路合流区出现的交通事故占事故总数的30%,而入口合流区域的交通安全形势更为严重[2],主要是由于车辆合流时主线提供的空档太小,导致合流区域车辆拥挤,进而诱发交通事故[3].准确地识别匝道合流区域的交通冲突,可以减少匝道合流区由于驾驶员自身对合流情况判断不足而引发的车辆碰撞,对于提高整个交织区域的车辆运行安全意义重大.
学者们提出了多种交通冲突指标.比如距离碰撞时间TTC(Time to Collision)[4]、后侵入时间PET[5]、制动时间等[6],美国、日本和欧洲的一些汽车厂家和研究机构[7],利用安装于车上的各种传感器,如毫米波雷达、激光雷达、机器视觉、超声传感器和GPS等探测车辆运行信息,用于安全系统模型设计.在交通冲突识别方法方面,传统的匝道合流区交通管理与控制方式主要有“流体动力学理论”“间隙接受理论”等模型与算法[8],曹雨等采用可接受间隙理论判别交通冲突,指出可以采用一个或多个指标进行交通冲突判别[9].区分冲突严重程度的阈值方面,Autey等采用3.0 s作为阈值[10],Tageldin采用4.0 s作为阈值[11].Lord等在研究交叉口行人与机动车交通冲突时采用3.0 s[12],而Ismail采用1.5 s作为冲突严重性与否的判别阈值[13].在机动车与自行车研究方面,Sayed等采用2.0 s作为阈值[14].
本文研究入口匝道汇入车辆与主线直行车辆的冲突识别问题,结合车辆运动信息,对即将进入交织区的汇入车辆与主线直行车辆进行冲突识别,构建匝道合流区冲突识别模型,给出车辆交通冲突严重程度的确定方法,并利用VISSIM对匝道合流区冲突识别模型进行仿真验证,研究成果可为车路协同下入口匝道合流车辆安全运行提供驾驶决策.
1 交通冲突识别模型构建
1.1 匝道合流区交通冲突概念
图1为典型的城市立交道路入口匝道合流区,主路为单向2车道,入口匝道为单向1车道,在不考虑主路内侧车道的车辆在合流区变道,以及进入合流区前不同车道车辆间的影响,匝道车流进入主路,主路车道1直行车流干扰是产生交通冲突的主要原因,图1中标出的a、b、c点均为交通冲突点.
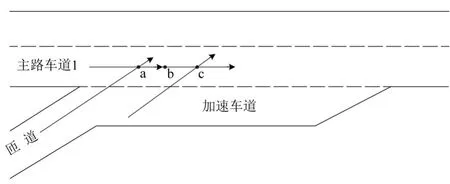
图1 入口匝道合流区交通冲突Fig.1 Traffic conflicts in ramp merging area
匝道合流区处的“交通冲突”可定义为匝道车辆驾驶员在驶入合流区的过程中,由于反应时间有限造成与主路车辆之间的相互干扰.对于冲突点a,由于接近合流区始端,匝道车辆车速较高,驾驶员对主路车辆的车速判断反应时间最少,所以是与主路车辆最先可能出现的冲突点,本文主要研究a型冲突.
1.2 交通冲突识别模型分类
现有的交通冲突识别模型主要有安全距离模型和安全时间模型2类.
(1)安全距离模型.
典型代表有马自达和本田模型.马自达模型采用自身的测距传感器实时测得车辆间距,指出车辆在路上行驶时应保证一定的绝对安全距离,该距离应在2~5 m范围内;本田模型采用分段式,分为警示和危险报警距离,模型需要采集庞大的交通数据,因此存在误差,导致算出的安全距离不够精确.
(2)安全时间模型.
安全时间模型主要以TTC(Time to Collision)为研究对象,TTC假设冲突者双方不采取任何保护措施,持续保持原有速度和行驶方向,两车发生碰撞的预期时间.该方法基于车辆当前时刻的速度和航向,并没有考虑到车辆的加速度,致使判断误差较大.当用距离碰撞时间判别冲突严重程度的时候,同样也需要设置临界时间标准.
另一种模型是以后侵入时间PET(Post Encroachment Time)为研究对象,PET是指第1辆车离开潜在碰撞点与第2辆车到达潜在碰撞点的时间差.
TTC和PET均是把时间作为衡量冲突严重性的指标,值越小代表冲突越严重.由于TTC模型中车辆发生冲突的瞬时速度较难获得,且TTC取值越小并不意味着事故的发生,因此,选取PET为研究对象,对于匝道合流区的冲突进行研究.
1.3 基于PET的匝道合流区冲突识别模型
如图2所示,由于匝道车辆可能在合流区始端提早驶入主路,也可能行驶到合流区末端都未能找到安全的可插入间隙,综合考虑这两种极端情况,因此取加速车道的长度x为合流区的冲突区域.
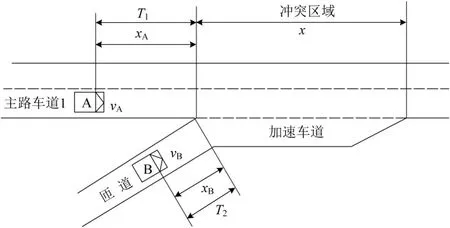
图2 匝道合流区车辆位置示意图Fig.2 Schematic diagram of the vehicle in ramp merging area
主路车辆A距合流冲突区域起点的距离为xA,速度为vA,加速度为aA.匝道车辆B距合流区起点距离为xB,速度为vB,加速度为aB,定义主路车辆A到达合流区起点的时间为T1,匝道车辆B到达合流区起点的时间为T2.
(1)主路车辆A到达合流冲突区域起点的时间T1.
主路车辆由于合流区交通状态的影响,在进入合流区的过程中近似为匀减速运动,已知xA、vA、aA,可得出主路车辆A到达合流区冲突区域起点的时间T1.
假设主路车辆A在t时间内达到的速度为vAt,可知在T1时间内车辆A行驶的距离SA为

式中:SA=xA,可以得到车辆A到达合流冲突区域起点的时间T1为

(2)匝道车辆B到达合流冲突区域起点的时间T2.
匝道车辆B由匝道进入合流区,先要经历一段近似直线的匀加速运动,时长t2,然后变为匀速运动,这段为反应时间Δt.已知xB、vB、aB,可获得匝道车辆B到达合流冲突区域起点的时间T2=t2+Δt.
假设匝道车辆B在t时间内达到的速度为vBt,可知在T2时间内匝道车辆B行驶的距离为

为了确保人员和车辆安全,通常会附加一定的安全距离d0,使得预警驾驶员时,驾驶员有足够的反应时间,因此,匝道车辆B距合流区起点距离xB可以表示为

式中:d0=vBΔt,可得

匝道车辆B到达合流冲突区域起点时间T2为

匝道合流区冲突识别模型为

2 PET模型修正与阈值确定
2.1 数据采集与处理
(1)数据采集.
模型构建需要收集大量实验数据,包括车辆位置、速度和状态等精确信息.因此选择10辆实验车辆,每辆车都安装有GPS、雷达、速度传感器、加速度传感器和车路通信的车载终端,车辆行驶过程中实时采集车辆位置信息,并通过车路通信以10 HZ的频率向路侧的车路协同通讯设备发送自己的位置信息,通信范围为1 000 m左右(满足合流区域通信范围要求).
车辆与路侧基础设施之间通过DSRC(Dedicated Short Range Communications)专用短程通信技术,发送和接收车辆传感器数据,实现实时通信.
共收集625组车辆合流实验数据,包括车辆位置、速度、加速度等参数信息.
(2)数据处理.
在数据收集期间,计算机系统连接感应器,用全球定位系统GPS来记录同步数据.其中雷达SmartMicr通用中程雷达,其测量周期时间可在20 ms和200 ms之间选择.
CPU实时更新运行中的车辆位置和航向的数据,包括合流车辆和直行车的GPS数据,修正后的位置、速度等运动信息.对输入值进行记录分析,实现对车辆位置、速度和相关联数据的估计.
在Matlab中开发数据管理和分析程序,对合流车辆传感器的原始输入数据进行筛选,最终进行冲突分析.
2.2 模型参数标定
(1)xA和xB.
实时获取主路车辆与匝道车辆距合流冲突区域起点的距离xA和xB.
(2)vA和vB.
vA和vB也可以通过埋设在路上的速度检测器来获取.
(3)aA和aB.
对于主路车辆A,通常制动减速度在1.5~2.5 m/s2,这里取aA=2.5 m/s2.对于匝道车辆B,加速度aB的采集主要由车辆后装的加速度传感器实时测量当前的加速度.
(4)驾驶员反应时间Δt.
Δt是驾驶员意识到有发生危险的可能,而要采取措施之前的时间,与驾驶人自身情况相关.其取范围一般在0.8~1.3 s,本算法Δt取值为1.2 s.
2.3 模型修正
本文中定义的PET是指合流区的车辆在合流过程中后车头部到达侵入线的时间与前车尾部离开侵入线的时间之差.其中,侵入线是一条垂直于车道分界线且与车辆的车道变换轨迹相交的虚拟直线.根据车辆位置的不同,采集的PET类型共有2种:
①目标车辆S与目标车道先导车辆A;②目标车辆S与目标车道跟随车辆B.理想条件下的侵入线位置示意图如图3所示.
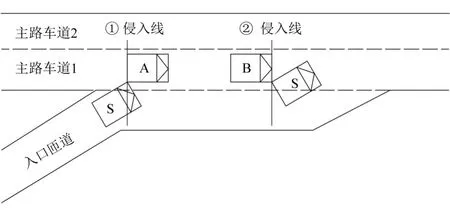
图3 理想条件下的侵入线位置Fig.3 Location of intrusive line under ideal conditions
侵入线穿过后车头部与前车尾部的碰撞临界点.然而,实测时难以对理想条件下的侵入线准确定位,因此采用图4所示的侵入线.在PET等于0时,图4中①和②的后车头部与前车尾部有重叠部分,表明碰撞已经发生.采用图4所示的侵入线采集到的PET存在观测误差,需要修正.
如图4所示,假设目标车道的车辆始终沿着车道中心线行驶,在PET等于0时,①和②的计算误差为后车头部与前车尾部间隙的宽度,即

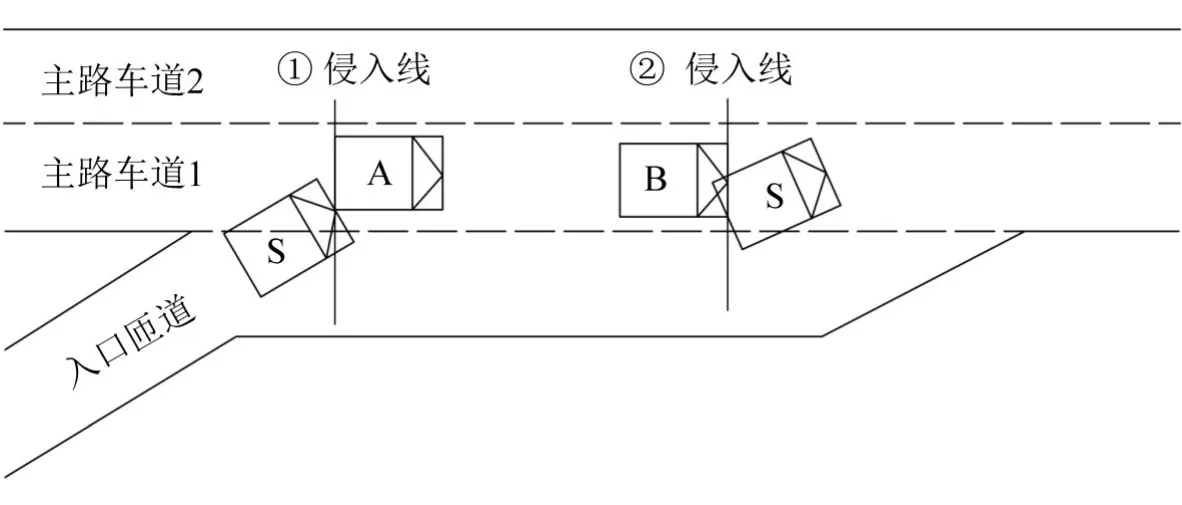
图4 实际观测时的侵入线位置Fig.4 Location of intrusive lines in actual observation
式中:Li为第i类误差(m),i=1,2;Lv为目标车辆宽度,其中,小型车1.70 m,中型车1.80 m,大型车1.90 m;θ为目标车辆轨迹与车道分界线在侵入处的夹角.
目标车辆轨迹与车道分界线在侵入处的夹角取30°,代入式(8),得到计算误差.当目标车辆为小型车时,Li=0.425 m;目标车辆为中型车时,Li=0.450 m;目标车辆为大型车时,Li=0.475 m.
根据距离误差和车辆之间的位置关系,得到修正后的模型为

式中:PETi为误差修正后的第i类 PET(s),i=1,2;PETs为原模型计算得到的第s类 PET(s),s=1,2;ti为第i类PET的观测误差(s);v为后车的速度(m/s).当i=1时,式(9)取加号;i=2时,取减号.
2.4 冲突阈值确定
分别采用正态分布、伽马分布和韦布尔分布对匝道合流区的PET数据进行拟合,得到PET分布直方图,如图5所示.数据拟合结果如表1所示,由表1可知,合流区的PET数据与伽马分布拟合较好(对数似然值为-995.829).
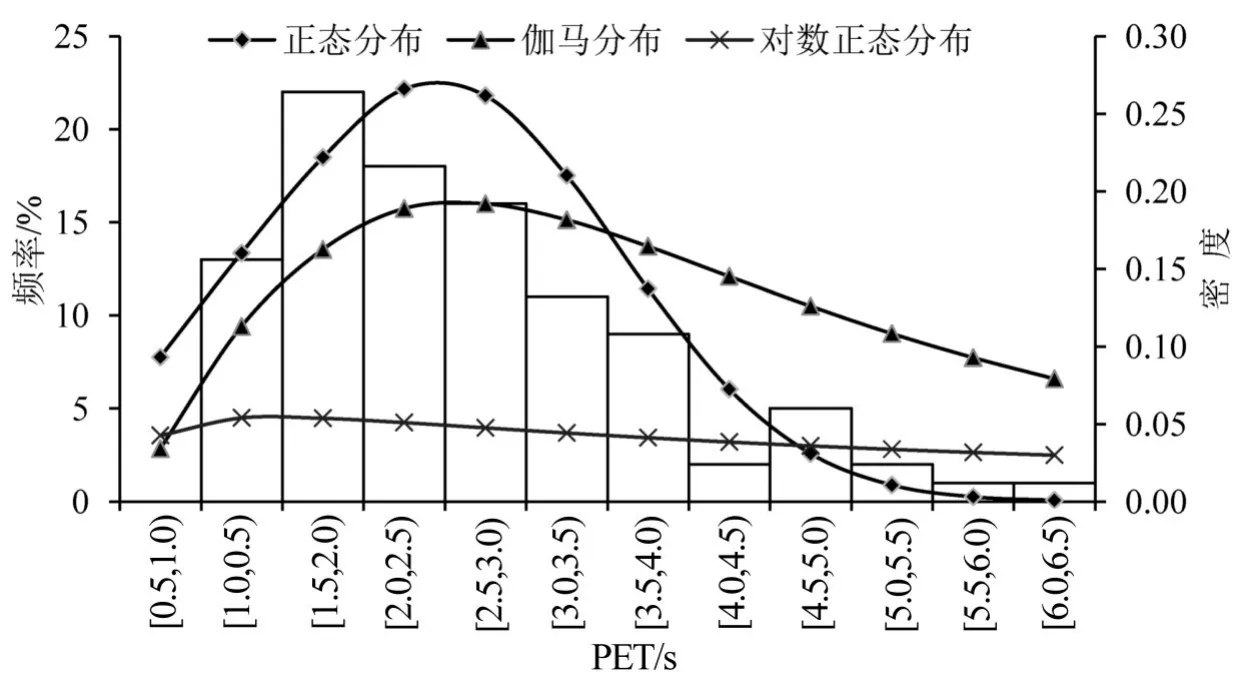
图5 合流区PET直方图与拟合分布Fig.5 PET histogram and fitting distribution of merging area
依据伽马分布,分别选取15%和85%分位值作为严重冲突和潜在冲突的PET阈值,得到对应PET阈值分别为2.4 s和3.6 s.根据上述PET值阈值确定方法,将交通冲突划分为3个等级:严重冲突、轻微冲突、潜在冲突.以哈尔滨市文昌立交入口匝道合流区段数据资料为依据,得到该入口区域PET阈值范围为:PET> 3.6 s时,为潜在冲突;2.4 s<PET≤3.6 s时为轻微冲突;PET≤2.4 s时为严重冲突.
3 冲突识别模型有效性验证
3.1 仿真方案设计
利用微观VISSIM仿真软件,对哈尔滨市文昌立交宣化街上桥匝道合流区交通流状况进行仿真模拟,合流区范围如图6所示.
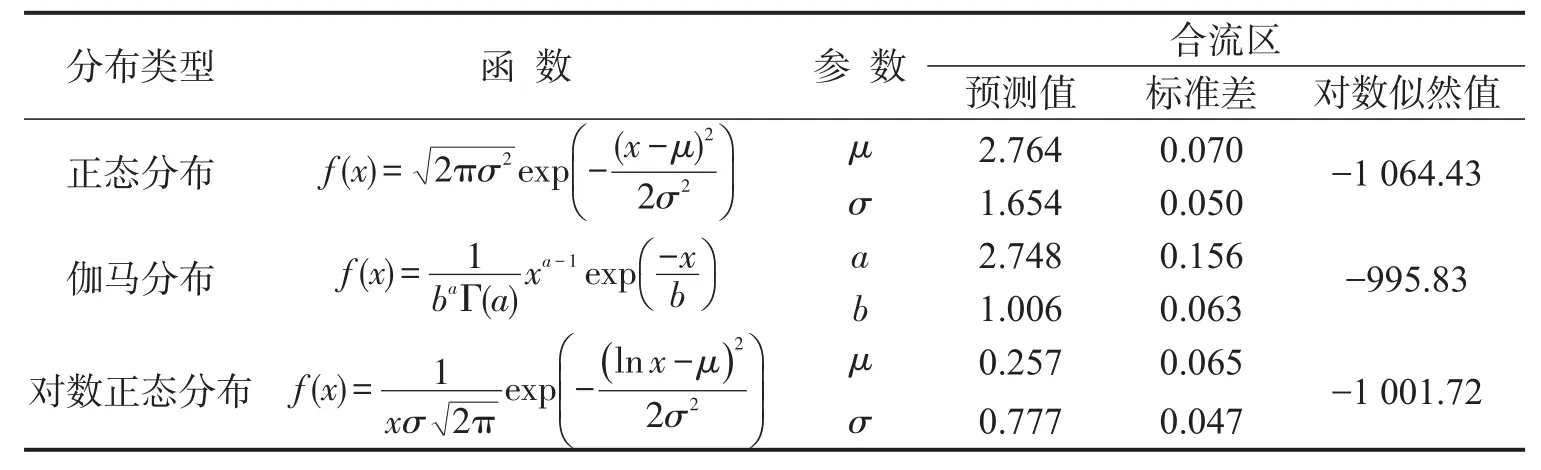
表1 PET数据拟合结果Table 1 Fitting results of PET data

图6 合流区范围示意图Fig.6 Sketch map of merging area
结合采集数据对该立交合流区的交通参数进行设置,设定车型组成,期望速度分布,车辆的加、减速特性等主要参数,分别讨论不采用模型和采用模型2种情况下的安全效果、通行效率及冲突识别的有效性.
3.2 通行效率评价
采用冲突识别模型后,主路车辆的通行时间和没有采用冲突识别模型的通行时间相比变化不大,从主路起点到主路终点600 m内车辆平均通行时间仅增加了0.4%,如图7所示.
而从匝道起点到主路672 m范围内,采用冲突识别模型后,匝道车辆的通行时间平均减少了36.5%.由图8可知,道路固定长度内的通行时间并没有增加,而是平均减少了16.1%.
3.3 冲突识别模型评价
为验证冲突识别模型的有效性,提取24个有效观测片段样本(各有效片段统计间隔时间为5 min,总计时间2 h),分别将匝道合流区实际冲突次数与采用、不采用冲突模型得到的识别结果进行对比,结果如表2所示.

图7 主路车辆平均通行时间比较Fig.7 Comparison of average transit time of main road vehicles
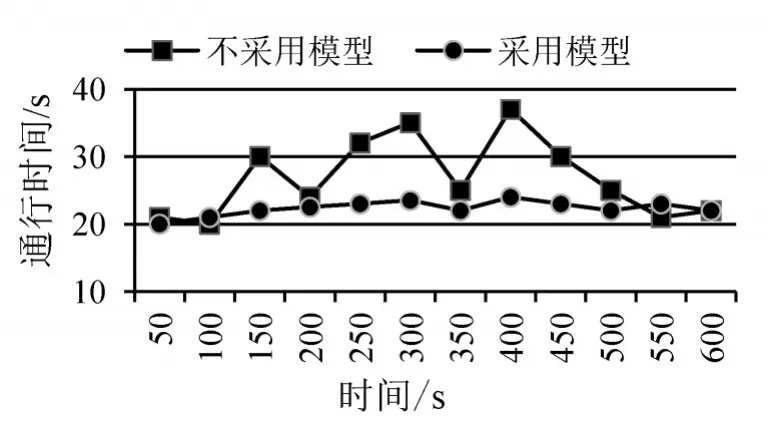
图8 全部车辆平均通行时间比较Fig.8 Comparison of average travel time of all vehicles

表2 冲突识别结果分析Table 2 Analysis results of conflict identification
由表2可知,使用冲突识别模型后,冲突等级识别准确率为91.71%,高于未使用冲突识别模型时的准确率82.76%,可较准确的识别匝道合流区车辆间的潜在交通冲突.
4 结论
本文研究入口匝道合流区汇入车辆与主线直行车辆的冲突识别问题,结合车辆运动信息,构建了基于PET算法的匝道合流区冲突识别模型,并对于模型参数进行了标定;采用仿真分析法对匝道合流区冲突识别模型进行了有效性验证,结果表明,采用该模型能有效识别匝道合流区的潜在冲突,合流区车辆通行时间平均减少16.1%,冲突等级识别准确率为91.71%,较未使用冲突识别模型提高了8.95%,验证了所建模型的有效性;对模型中的PET进行数据拟合,给出入口匝道合流区PET阈值范围确定方法,确定了关键参数的冲突阈值,并结合实际案例,确定了该入口匝道的PET阈值范围.
准确地识别匝道合流区域的交通冲突,可为车路协同下匝道合流车辆提供驾驶决策,进而减少车辆碰撞事故的发生,提升整个交织区域的道路交通安全水平.
参考文献:
[1]HYDÉN C,LINDERHOLM L.The swedish trafficconflicts technique[C].International Calibration Study of Traffic Conflict Techniques,Springer Berlin Heidelberg,1984.
[2]WANG X,HADIUZZAMAN M.Analyzing sensitivity of freeway capacity at a complex weaving segment[J].Annual Conference of the Canadian Society for Civil Engineering,Edmonton,Canada,2014.
[3]WANG Y P,E W J,TANG W Z.Automated on-ramp merging control algorithm based on internet-connected vehicles[J].IET Intelligent Transport Systems,2013,7(4):371-379.
[4]COOPER P J.Experience with traffic conflicts in canada with emphasis on“post encroachment time”techniques[M]//InternationalCalibration Study of Traffic Conflict Techniques,Springer Berlin Heidelberg,1984:75-96.
[5]VOGEL K.A comparison of headway and time to collision as safety indicators[J].Accident Analysis&Prevention,2003,35(3):427-433.
[6]LU G.Quantifying the severity of traffic conflict by assuming moving elements as rectangles at intersection[J].Social and Behavioral Sciences,2012(43):255-264.
[7]SCARINCI R,HEYDECKER B.Control concepts for facilitating motorway on-ramp merging using intelligent vehicles[J].Transport Reviews,2014,34(6):75-97.
[8]WANG X,HADIUZZAMAN M.Sensitivity analyzing of freeway capacity at a complex weaving segment[C].Cota International Conference of Transportation Professionals,2014.
[9]曹雨,孙小端,贺玉龙.基于可接受间隙理论的交通冲突判别方法研究[J].道路交通与安全,2014(3):34-40.[CAO Y,SUN X D,HE Y L.Research on methods of traffic conflict discrimination based on gap acceptance theory[J].Road Traffic and Safety,2014(3):34-40.]
[10]AUTEY J,SAYED T,ZAKI M H.Safety evaluation of right-turn smart channels using automated traffic conflict analysis[J].Accident Analysis Prevention,2012,45(1):120-130.
[11]TAGELDIN A,SAYED T,SHAABAN K,etal.Automated analysis and validation of right-turn merging behavior[J].Journal of Transportation Safety&Security,2015,7(2):138-152.
[12]LORD D.Analysis of pedestrian conflicts with leftturning traffic[J].Transportation Research Record:Journal of the Transportation Research Board,1996(1538):61-67.
[13]ISMAIL K,et al.Automated analyzes is of pedestrianvehicle conflicts using video data[J].Transportation Research Record:Journal of the Transportation Research Board,2009(2140):44-54.
[14]SAYED T,ZAKI M,AUTEY J.Automated safety diagnosis of vehicle-bicycle interactions using computer vision analysis[J].Safety Science,2013(59):163-172.
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
中国交通信息化(2020年5期)2021-01-14
中国交通信息化(2020年4期)2021-01-14
戏曲研究(2020年4期)2020-07-22
中国交通信息化(2019年2期)2019-03-25
小学生学习指导(低年级)(2018年10期)2018-10-13
中国经济周刊(2018年31期)2018-08-14
音乐天地(音乐创作版)(2018年2期)2018-05-21
中国交通信息化(2018年11期)2018-03-01
小学生作文(中高年级适用)(2017年3期)2017-07-07
