基于特征提取的无人机图像建筑区域提取
2018-04-26 08:34李岁月
无线互联科技 2018年7期
李岁月,陈 柳
(武汉理工大学 自动化学院,湖北 武汉 430070)
1 数字图像处理建筑物轮廓技术概述
建筑物轮廓的提取和分类识别在军事目标识别、城市建设、抵御和减少灾难等上有很高的应用[1],提高建筑物的提取精度和效率对城市规划、三维城市重建等有重要意义。搭载在无人机上的电荷耦合器件(Charge Coupled Device,CCD)摄像机能轻易地捕捉到大量的地物和空间信息[2],但受环境因素影响较大,城乡建筑密度差异较大,分布不规则导致不利于纹理[3]的分析。因此,作为无人机视觉系统中最为重要的技术,利用数字图像图像处理技术和前沿的计算机视觉理论来实现复杂环境下的建筑物检测与提取具有重要意义。
2 建筑区域提取算法
本次研究用于获取数据源采用的是普通民用大疆精灵系列精灵3无人机,于2017年冬季在武汉市某实验小区上的70~200米的飞行高度上收集的一组航拍图像。无人机在作业时受到航拍姿态、天气和高度等因素影响,会有模糊等崎变的现象发生,在进行特征提取之前要进行预处理,才能排除干扰提取出更多的特征,使算法更加高效。
2.1 预处理
采用限制对比度自适应直方图均衡重新分布亮度比例来提高无人机图像的对比度,能够保留图像的细节特征。对比度受限的自适应直方图均衡化(Contrast Limited Adaptive Histogram Equalization,CLAHE)是对自适应直方图均衡化(Adaptive Histgram Equalization,AHE)的优化,能够抑制AHE放大同区域间噪声的影响,CLAHE算法原理是预先设置一定的阈值裁剪直方图来抑制放大的幅度,并将裁剪掉的部分均匀地分布到直方图的其他部分。算法过程为:首先把源图像分为3块;其次,统计每个子块的直方图,裁剪门限值后对直方图均衡化;最后,线性插值重构、重链接,则得到最后的图像方法。
2.2 MSER检测
极大值稳定区域(Maximally Stable Extremal Regions,MSER)[5]是一种类似分水岭图像的分割与匹配算法,近年来MSER多应用于场景文本检测并取得了非常好的效果。最大极稳定区域是指对于A1,A2,……,An-1,An,n∈N包含局部极值区域集,满足An-1∈An,若区域变化率在nmax处取得极小值时,则区域Anmax为最大极稳定区域。极值区域反映的就是集合中的像素灰度值总大于或小于其邻域区域像素的灰度值。MSER对每一个局部极值区域进行阈值划分,寻找一系列阈值集来实现局部图像变换。对于最大极稳定区域,通过局部阈值集操作,区域内的像素数量变化是最小的。
David Nister等[8]2008年发表的论文中改进了Matas等人于2002年提出的MSER算法,该算法计算的时间复杂度要比原著MSER算法小得多,其数学公式为

Qi表示阈值为i时的某一连通区域,∆为灰度阈值的微小变化量,qi为阈值是i时的区域Qi的变化率。当qi为局部极小值时,则Qi为最大稳定极值区域。
对预处理之后的无人机图像建筑区域的MSER特征的提取步骤如下:
像素点排序,极值区域生成,稳定区域判定,区域拟合,区域归一化。为了同时得到图像的最大和最小灰度,可以预先将图像的灰度反转:Ir=255-I,再进行一遍算法检测。利用检测到的灰度以及反值灰度提取出MSER特征点,在此基础上进行位移操作,在检验的图像中利用椭圆标记计算出图像的稳定区域的数量,作为提取的MSER特征。
2.3 FCM聚类
分析本次实验图像可知信息清晰、地物结构明显的特点可知,图片中包含的目标信息有限,以目标提取物为主,干扰因素如植被、道路、阴影占据较少的信息量。对于分类较少的场景,模糊均值聚类(Fuzzy C-Means,FCM)方法具有速度快、提取效率高、无需进行训练的优势,FCM算法可以通过对目标函数的优化而得到各个样本点对全部类中心的隶属度,来判断样本点所属类别,以此来对数据进行分类。所以本文选择基于 FCM 聚类算法来对建筑物进行聚类提取。其算法流程如下:用0~1之间的随机数初始化隶属矩阵U,数据的隶属度和为1;计算聚类中心Ci,i=1......C;计算价值函数,若价值函数小于某个确定的阈值,或者相比上次的改变量小于某个阈值,则停止算法;重新计算U矩阵,进行第二步操作。
在初始化聚类中心后,执行此迭代过程,以此确保FCM收敛于一个最优解。
MSER特征经过聚类之后,产生了若干个聚类中心,也就是说实验图片中含有若干栋建筑物,实验结果说明,经过此种柔性的聚类划分,可以迅速地得出建筑物的数量。
2.4 形态学提取建筑区域
传统的sobel,prewitt和新兴的canny边缘检测方法,经过实验发现难免还是会存在一些问题,尤其是在解决针对此实验的情况下,还是不能达到预期的处理效果,在检测精度以及抗噪能力方面还是有些不足。
对聚类分出来的值进行准确的描述成为提高提取准确率的关键,数学形态学被证明为是对建筑图像区域提取其中有效的方法[4]。利用数学形态学对图像进行提取的方法是:通过选取恰当的结构元素,膨胀操作,将膨胀后的图像与原图像做减法即可得到图像梯度边缘。
将聚类之后的图像对图像进行交替的开闭滤波以平滑图像,并用椭圆结构元素分别进行边缘检测,最终的图像边缘是这些方向边缘的加权和。
3 实验结果与分析
将本文算法提取结果与将人工目释标注出的建筑区域作基准数据的提取结果进行比较。不同样本数据的提取结果如表1所示,平均正确率达到了90.36%,误检率比较低,漏检率偏高,这是因为在无人机图像中建筑区域偏大,灰度变化不明显,另外建筑边缘有部分树木等遮挡物,也是造成误检的原因。
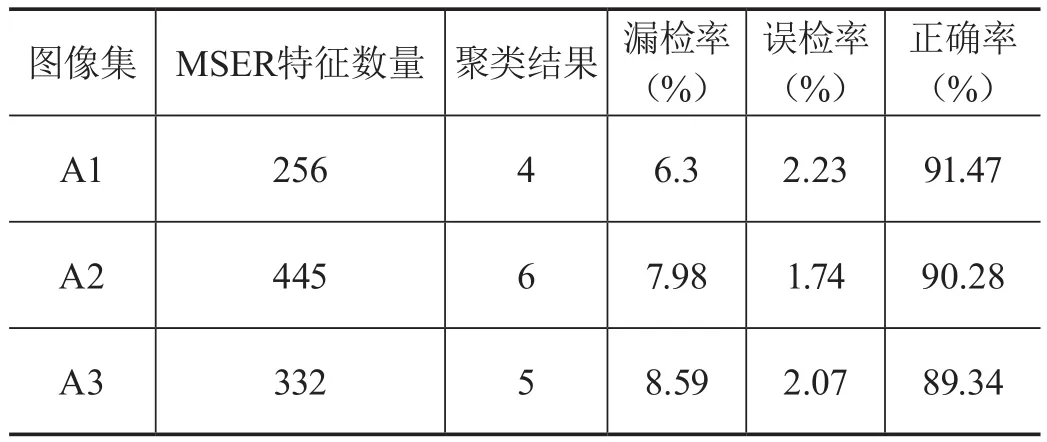
表1 不同样本数据的提取结果
综上分析,在对无人机图像进行预处理之后,利用MSER算法对图像进行特征检测,采用FCM聚类算法划分建筑物个数,最后利用形态学来描述建筑区域的算法取得了90.36%的准确率,对无人机图像建筑区域提取是不错的方法。另外,在森林地区由于树木之间的遮挡、城市人造目标例如汽车、水泥路等造成局部存在稳定区域,会对建筑区域检测提取造成误扰。如何对无人机图像特征进行准确的划分研究以及如何优化MSER特征提取和增强本文算法的稳定性是以后研究工作的方向 。
[参考文献]
[1]KAAMIN M,IDRIS N A,BUKARI S M,et al.Visual inspection of historical buildings using micro UAV[C].MATEC Web of Conferences, 2017(103):7003.
[2]NISTÉR D,STEWÉNIUS H.Linear time maximally stable extremal regions[C].Marseille:European Conference on Computer Vision,2018(10):183-196.
[3]SHI C,WANG C,XIAO B,et al.Scene text detection using graph model built upon maximally stable extermal regions[J].Pattern Recognition Letters,2013(2):107-116.
[4]LEFEVRE S,WEBER J.Automatic building extraction in VHR images using advanced morphological operators[J].Urban Remote Sensing Joint Event,2007(20):1-5.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
北京航空航天大学学报(2022年6期)2022-07-02
铁道建筑技术(2021年4期)2021-07-21
高技术通讯(2021年3期)2021-06-09
小学生学习指导(低年级)(2019年9期)2019-09-25
摄影之友(影像视觉)(2018年12期)2019-01-28
自动化学报(2017年5期)2017-05-14
光学精密工程(2016年1期)2016-11-07
潍坊学院学报(2016年6期)2016-04-18
计算机工程(2015年8期)2015-07-03