太阳能追光智能避障寻迹小车设计研究
2018-04-26 08:34:40倪笑宇李晓明
无线互联科技 2018年7期
倪笑宇,杨 硕,蒋 娜,李晓明
(河北建筑工程学院 机械工程学院,河北 张家口 075000)
1 智能车追光避障寻迹功能研究背景
近年来随着我国光伏产业的发展,更多的设备加入到了光伏产业的大军中去,对于太阳能汽车这块尤其突出,太阳能汽车相对于传统的汽车,其有着零排放、清洁、可持续发展等诸多优点,但目前市场上并没有太多此类产品,主要是由于太阳能充电效率低所导致。本设计主要是对智能车追光避障寻迹功能进行研究,其次对小车的充电效率进行初步研究。利用智能小车来模拟真实的汽车,智能小车是一个集控制器、传感器、动力输出装置于一身的智能控制系统,通过一个多角度的光照传感器来采集周围太阳光的数据,由单片机进行分析后输出并且控制太阳板的方位,从而将太阳能的充电效率提升到最大化的程度。
2 结构组成
智能小车主要由电源部分、驱动部分、控制部分、信号采集部分以及太阳能充电5大部分组成,如图1所示。电源部分由两节18 650电池串联提供;电机驱动部分使用一块L293D电机驱动芯片来驱动小车的车轮进行转动;控制部分由一块STM32的32位单片机芯片来提供控制;信号采集部分包括光照传感器、超声波传感器、红外传感器;太阳能充电部分由一块小型太阳电池板对小车的电池进行充电。阳光充足时最大充电电压为6 V,最大充电电流为120 mA。
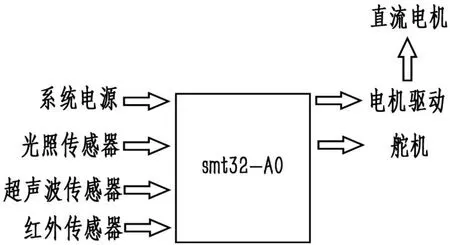
图1 系统总体结构
整个系统可分为3个子系统:(1)小车的追光充电系统,包括传感器的数据采集以及太阳能板对锂电池的充电部分。(2)小车的控制系统,包括小车的驱动部分以及追光和避障。(3)通信系统,小车可通过红外接收和发射器进行通信以及控制小车的运动状态。
3 电路设计
3.1 太阳能充电电路
通过一个太阳能板对电池组进行充电,由一个二极管做反充保护,同时并联两个大电阻对电压进行采集,将采集到的电压信号传给单片机。
3.2 多方位光照传感器电路
本电路共使用4个GY-30数字光强度检测模块,实现对前后左右4个方位光线的检测,当光线照射到传感器时,可直接数字输出,省略复杂的计算,与单片机采用集成电路总线(Inter Integrated Circui,IIC)协议进行通信,单片机通过各个传感器所传回来的数值进行判断后便可计算出光源的位置。
3.3 电机驱动电路
此设计采用直流电机驱动,驱动芯片使用L293D。采用脉冲宽度调制(Pulse Width Modulation,PWM)来改变电机输出功率,即通过定时器改变周期内高低电平的占空比来改变输出电压,从而实现左右电机的转速控制。
3.4 主控电路设计
主控制器采用STM32F103单片机作为控制芯片,STM32F103系列是以cortex-M3作为内核,是一个高性能、功能强大的处理器,一方面增强了对整个系统控制的稳定性和有效性,另一方面对智能车研发和性能升级给予保障。
4 软件设计
软件设计部分主要由下位机程序构成,主控制器采用STM32F103单片机作为控制芯片,通过Keil Vision 5平台进行程序开发,并利用C语言编写各功能模块子函数,整个设计由主控程序将各子程序融合,实现了小车的前进、转向和停止,并且能够在传感器检测下实现简单的循迹避障和太阳能追光充电功能。利用C语言程序来驱动单片机内部的中断、定时器和多路PWM波输出,程序主要有智能寻迹部分、太阳能追光部分、超声波智能摇头避障、红外遥控等4大部分构成,主要通过外部电路低电平触发的方式来进行程序之间的切换。
5 智能小车测试
经过硬件搭接与软件编程,完成智能小车的原理样机设计,如图2—3所示,现对其性能进行测试。

图2 智能小车前侧

图3 智能小车后侧
循迹测试:通过对地面上铺设一条黑线,黑线间距小于两个红外传感器之间的距离,第一次测试结果,小车向左侧偏离黑线通过调节对应的电位器来改变传感器的灵敏度。第二次测试结果,小车循迹正常。
红外避障测试:此部分测试是监测小车对障碍物的感知功能,通过在小车前面摆放障碍物,第一次测试结果发现小车在碰触到障碍物之后才作出避障反应,通过缩减程序中的延迟时间使小车提前作出响应。第二次测试结果小车可以在障碍物前方3 cm左右作出反应,满足避障要求。
太阳能追光测试:测试第一项,通过按钮将小车运行程序调至太阳能追光模式,外加显示器模块观测传感器传回数值是否正常,经测试传感器传回数值均正常。测试第二项,将传感器接入控制系统,看系统闭环控制是否正常。小车开机后摆动幅度一直与太阳光方向出现明显偏差,经过分析以后得出是传感器数值与小车调整幅度之间出现了问题,通过减少车轮转动时间来减少摆动幅度。经过多次调整后小车旋转方向慢慢接近太阳光方向,最终达到实验要求。
太阳能充电效率的测试:测试将以使用该系统为基础的智能车在实际环境下的太阳能充电情况与无此系统的传统太阳能充电方式做对比得出的测试结果如表1所示。
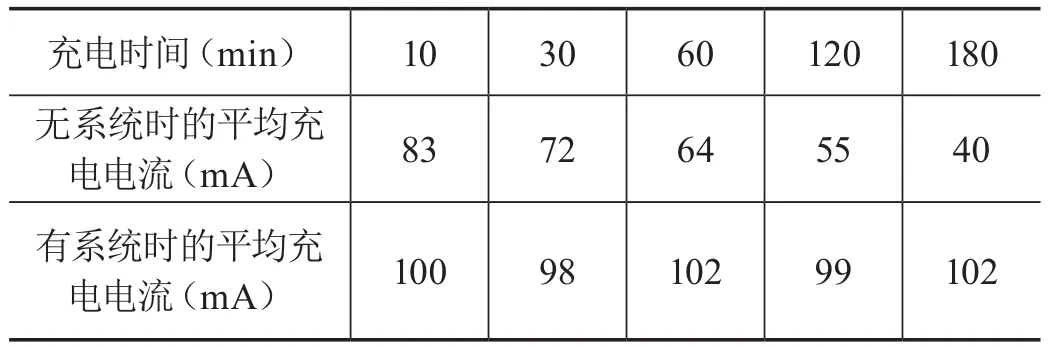
表1 充电效率对比
平均电流由多次测试的值取平均得出,经过测试得出在用此系统充电时,充电效率得到明显提升。
6 结语
本文主要对智能小车控制系统进行分析研究,并且实地测试后,结果达到了预期效果,实现了追光避障智能小车的功能。但是小车的太阳能电池不足以提供系统工作需要的全部电能,后续可增加太阳能电池板接收光照的面积,利用收集和转化的电能驱动小车,实现真正意义上的太阳能小车,具有很好的实际应用意义。
[参考文献]
[1]童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2015.
[2]张洋.原子教你玩STM32[M].北京:北京航空航天大学出版社,2015.
[3]徐爱钧.Keil C51单片机高级语言应用编程技术[M].北京:电子工业出版社,2009.
猜你喜欢
科学大众(2022年23期)2023-01-30 07:03:44
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
电子制作(2019年13期)2020-01-14 03:15:28
电子制作(2019年15期)2019-08-27 01:12:10
电子制作(2019年9期)2019-05-30 09:42:02
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
发明与创新(2016年6期)2016-08-21 13:49:36