基于模糊PID的硅溶胶反应釜温度控制系统的设计
2018-04-26 08:34黎洪生曹阳阳
无线互联科技 2018年7期
严 麒,黎洪生,曹阳阳
(武汉理工大学 自动化学院,湖北 武汉 430070)
随着中国经济的崛起,国内无机高分子材料、化学机械抛光(Chemically Mechanical Polishing ,CMP)、精密制造、无机涂料等工业迎来了它们的高速发展期。国内企业对硅溶胶的需求剧增,国外的硅溶胶生产企业为了掠夺这块大蛋糕,也纷纷布局中国市场。我国本土的硅溶胶生产企业怎样抢夺这个大市场呢[1]?这就需要我们不停地改良生产设备和工艺,这样才能有效提高生产效率和加强产品的质量。硅溶胶反应釜是现在生产硅溶胶的主要机械设备,设备中的反应液是利用蒸汽来加热的,也就是根据自动调节蒸汽电动阀的开度大小来调节温度。利用热电阻来测量反应釜中液体的温度,温度信号被转换成了电阻信号之后通过专用导线连入热电阻模块EM231。然后电阻信号变为电压信号之后又在内部转化为数字量,最后通过可编程逻辑控制器(Programmable Logic Controller,PLC)内部程序的量化变为测量的温度。将这个值再同PLC内部设定值进行对比,模糊PID程序控制其结果,它会运算后算出所需要的控制量,再同模拟量模块EM232发生数据转换之后把输出信号传递给电动阀,这个电动阀是用来控制蒸汽的,它会根据信号调节开度来控制反应液的温度。
1 模糊PID控制系统结构
模糊控制的特点有对数学模型的精确性要求不高、控制效果理想、鲁棒性强。有学者提出了神经—模糊融合控制模型,该模型是将融合算法、融合结构以及控制进行三位一体的设计。同时,有学者提出利用同伦BP网络记忆模糊规则,通过“联想方式”方式采用这些经验。然而,模糊控制领域仍存在有待深入研究的问题:(1)归纳总结可遵循的一般设计原则;(2)模糊控制系统的最优化问题、稳定性、功能的评价;(3)如何对非线性复杂系统进行模糊建模,建立模糊规则和模糊推理算法的研究。模糊控制的特点是适用于模型不完全、非线性、时变的系统上,便于让操作人员可以通过自然语言进行人机对话[2]。
在实际中,应用最为普遍的是PID控制。其调节器控制规律表现为微分控制、比例控制、积分控制。线性定常系统是PID控制的主要研究对象。因为它结构较简单、稳定性较好、调整方便,所以被普遍应用于工业过程控制。当出现以下情况时,常规的PID控制器无法实现精确控制。(1)未能全面掌握被控对象的结构和参数;(2)无法得到精确的数学模型,而模糊PID控制能解决。正因为模糊PID控制结合PID控制和模糊控制的优点,在工业控制领域中被应用的特别普遍。模糊PID控制是根据PID控制器的3个参数与偏差和偏差的变化之间的模糊关系,在运行时不断检测偏差和偏差的变化,通过事先确定的关系,利用模糊推理的方法,在线修改PID控制器的3个参数,让PID参数可自整定[3]。
利用模糊PID控制系统对硅溶胶反应釜进行温度控制,主要是由Fuzzy控制器、PID控制器、温度传感器和蒸汽电动阀构成。
PID控制器的数学模型可以用下式表示:

其中,输入e(t)为控制器的输入,也就是测量值与给定值之差,也就是偏差。TI是积分时间,Kp是比例系数,TD是微分时间,u(t)是PID控制器的输出。
比例增益Kp,积分时间常数TI,和微分时间常数TD都是PID控制器的控制参数。这些参数对系统性能影响很大,具体分为以下几点。
(1)比例项部分其实就是对预设值和反馈值差值的放大倍数,从而加大P值,可以减少从非稳态到稳态的时间。但是同时也可能造成电机转速在预设值附近振荡的情形,所以又引入积分I解决此问题。
(2)积分项部分其实就是对预设值和反馈值之间的差值在时间上进行累加。当差值不是很大时,不引起振荡。
(3)微分项部分其实就是求电机转速的变化率,也就是前后两次差值的差而已。也就是说,微分项是根据差值变化的速率,提前给出一个相应的调节动作。可见微分项的调节是超前的。并且D值越大,超前作用越明显。
2 模糊PID控制器的设计
在工业控制中,一般选择有两个输入变量的模糊PID控制器,这两个输入变量是E(输出反馈量和输入设定值的偏差)和△E(偏差变化率)。两个变量能更好地表现输入变量的动态变化,也可满足很多工程的要求。它采用“如果E是X且△E是Y,则U是Z”的模糊规则。U是模糊控制的输出量;Y(t)是控制器实测值;e是控制器输入偏差;Ku是控制器输出量化因子;Ke是控制器输入偏差量化因子,u是控制器实际输出量;△e是控制器输入偏差变化率;E是控制器输出反馈量和输入设定值的偏差;△E是控制器输出反馈量和输入设定值的偏差率;Y0是控制器给定值;K△e是控制器偏差变化率的量化因子[4],如图1所示。
由取样得到的E以及△E,能够计算得到相应的控制变量U,可将全部E以及△E中元素的全部组合得到的控制变量值写成矩阵形式得到一个查询表。查询表中的值先由计算机计算得出,然后存入内存,即可提高运算性能。在进行模糊控制时,通常根据模糊量化后的E以及△E来查表获取控制量的变化值,再乘以比例因子来得到输出控制被控量。为了表达方便,假定将输入、输出论域量化为{2,-1,0,1,2},且使控制量的模糊子集的论域为{MB,MS,0,PB,PS},选三角形隶属函数为其隶属函数,通过隶属函数和拉森推理法可得到一个模糊控制查询表[5]。
3 温度控制的程序设计
在硅溶胶反应釜控制系统中,模糊控制算法流程如图2所示,采用模糊PID的温度控制系统。
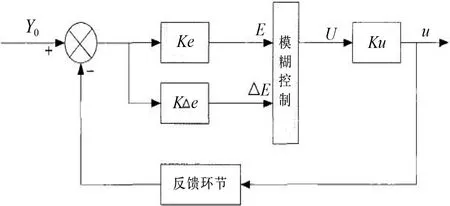
图1 模糊控制系统结构
4 结语
本文首先介绍了硅溶胶生产的背景,强调了生产时反应釜温度控制的重要性,然后重点说明了用模糊控制系统来设计的温度控制及模糊控制器的程序实现。现场运用结果表明模糊PID控制器提高了系统抗外部干扰和适应内部参数变化的鲁棒性,保证了硅溶胶生产温度控制系统的精度。
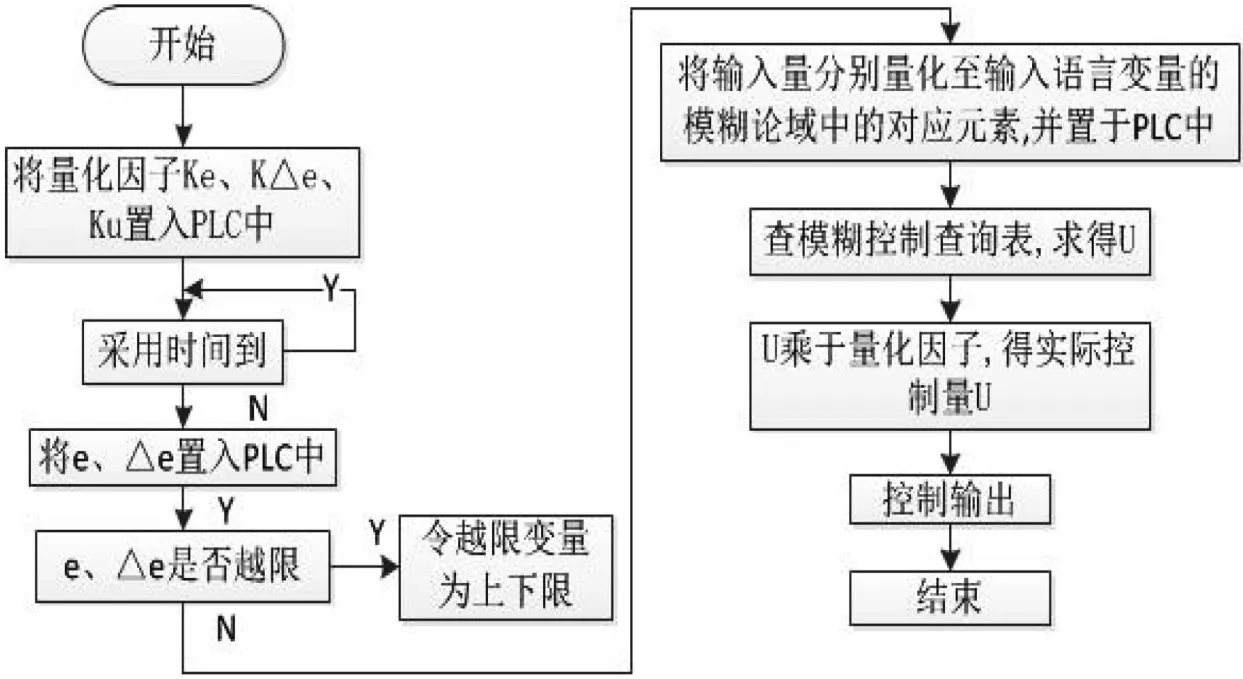
图2 模糊控制算法流程
[参考文献]
[1]汤红成,李著信,王正涛,等.一种模糊PID控制系统[J].电机与控制学报,2005(2):136-138.
[2]宋云霞,朱学峰.大时滞过程控制方法及应用[J].化工自动化及仪表,2001(4):9-15.
[3]陶永华.新型PID控制及其应用[M].北京:机械工业出版社,2002.
[4]韩大平,林国海,杜钢,等.模糊PID控制算法在回转窑温度控制中的应用[J].材料与冶金学报,2005(4):321-325.
[5]李牡丹,李丽宏,雷张伟.基于模糊PID控制的配料秤系统的实现[J].中国测试技术,2008(2):116-119.
猜你喜欢
安徽农业大学学报(2022年2期)2022-11-09
铜业工程(2021年1期)2021-04-23
中国造纸(2020年8期)2020-09-18
测控技术(2018年7期)2018-12-09
山西建筑(2018年22期)2018-03-22
科学与财富(2018年33期)2018-01-02
设备管理与维修(2016年6期)2016-03-16
石油化工建设(2016年6期)2016-02-27
当代化工研究(2016年1期)2016-02-17
化工管理(2014年24期)2014-08-15