地铁全自动驾驶车辆基地与常规车辆基地工艺设计差异的研究
2018-04-25 04:31:52杨超
智能城市 2018年6期
杨 超
广州地铁设计研究院有限公司,广东广州 510010
1 研究背景
地铁全自动驾驶系统 (fully automatic operation,FAO),是基于现代计算机、通信、控制和系统集成等技术实现列车运行全过程自动化的新一代城市轨道交通系统,是城市轨道交通自动化等级最高的系统[1]。截止2016年7月,全球37个城市55条线路采用全自动驾驶最小可技术,运营里程达803km,车站848座。预计到2025年全自动驾驶轨道交通线路里程将超过2300km[2]。
近年来,国内越来越多的城市轨道交通线路开始应用全自动驾驶技术,例如,已经开通的北京燕房线、上海10号线、广州APM线及设计中的南京地铁7号线、福州地铁4号线等。
全自动驾驶线路的设计,对车辆基地也提出了新要求,采用全自动驾驶模式设计的车辆基地,有利于最大限度发挥列车无人驾驶功能,减少车辆基地内检修作业调度时间和人力成本,确保车辆及检修作业人员安全。本文结合福州全自动驾驶车辆段的设计,对全自动驾驶模式下车辆段工艺设计方案与常规车辆段工艺设计方案进行了比较研究,指出了两者的差异。
2 全自动驾驶车辆基地概述
车辆基地是保证轨道交通线网正常运营的综合性基地,车辆基地以车辆段或停车场为主体。全自动驾驶车辆基地,能够将正线对列车的运营控制权延伸至车辆基地全自动运行区域,既可以满足常规车辆基地所具备的列车停车、整备、清洁、检查、定期检修、调试等一般要求,还能满足自动洗车、自动“唤醒”待班列车、启动列车并自动运行至正线等全自动驾驶新要求[3]。
3 全自动驾驶车辆段与常规车辆段工艺设计的差异
3.1 总平面布局的差异
采用全自动驾驶的车辆基地,需进行全自动运行区 (又称无人区) 和非全自动运行区 (又称有人区) 的划分,列车在转换轨上进行自动驾驶模式与人工驾驶模式的切换后,方能从一个区域行驶至另一个区域。车辆在全自动运行区内,可实现自动休眠、唤醒、准备、自检、运行、停车、洗车等操作[4]。一般来讲,停车列检库、洗车库、牵出线、咽喉区、出入段线等属于全自动运行区,而检修库、镟轮库、工程车库、调机库等属于非全自动运行区。全自动运行区与非全自动运行区在出入口位置设置门禁系统,并用围蔽进行隔离,人员或车辆经授权后方能通过门禁系统。
福州全自动驾驶车辆段定位为本线定修段,设计时采用了全自动驾驶的理念,并与原常规车辆段设计方案进行了比较,如图1所示,可以看出,常规车辆段总体布局方案虽较好的贯彻了节约用地、节约能源和资源的原则[5],且满足布置齐整、紧凑、合理的要求,但没有区分全自动运行区和非全自动运行区。而全自动驾驶车辆段的总体布局,对段内全自动运行区和非全自动运行区进行了彻底的隔离。车辆段总体布局方案见图1。

图1 车辆段总体布局方案
3.2 停车列检库设计的差异
停车列检库、检修库为车辆段的主体,检修库属非全自动运行区,与常规车辆段检修库工艺设计相同,停车列检库属全自动运行区,工艺设计差异较大:
(1) 常规停车列检库,检修作业人员在库内某一位置出发可沿库内道路到达库内的任意股道,全自动运行区的停车列检库,为保证人员及车辆安全,同时严格控制进入停车列检库的人员,需在库内设置防护分区,并用围蔽和门禁进行隔离。
(2) 常规停车列检库,一线两列位的停车列检库库内检查坑一般按50%设置,全自动运行区的停车列检库,由于库内防护分区的设置及检修时间不足,库内检查坑按100%设置。
(3) 常规停车列检库,检修作业人员在地面上到达库内各个位置,全自动运行区的停车列检库,检修作业人员主要通过贯通库房的地下通道至各防护分区,必要时可通过门禁系统至各区域。地下通道可设置在库房前中后位置,当设置在中部时,可仅设一条地下通道,但应保证一个分区至少有两个出入口,地下通道及出入口的数量应根据具体要求确定。
(4) 常规停车列检库,库房长度一般根据工艺设计需求确定,全自动运行区的停车列检库,库房长度除满足工艺要求外,还应满足信号的要求,因此库房长度有所增加。
图2为常规车辆段停车列检库设计方案与福州全自动驾驶车辆段停车列检库设计方案的比较,库房均为一线两列位布置,每两股道设为一跨。常规车辆段停车列检库库内一般设置运转综合楼,采用50%的柱式检查坑,库长设计为280m左右。全自动驾驶车辆段停车列检库,库内每跨设为一个防护分区,采用100%柱式检查坑,同时设有两条通往各分区的地下通道,根据本段信号要求,一线两列位间预留安全距离≥20m,后一列位车尾距车挡安全距离≥15m,导致最终设计的库长增加20m至300m。同时,根据实际情况,将人员出入较多的运转综合楼优化合并至非自动运行区的检修库 (详见图1(b) 全自动驾驶车辆段总体布局方案) 。
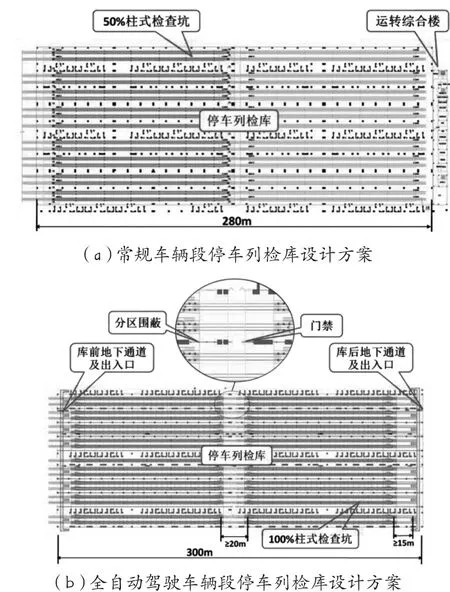
图2 车辆段停车列检库设计方案
3.3 洗车方案的差异
常规车辆段洗车时,列车通过人工驾驶的方式通过洗车机,完成洗车作业,全自动运行区的洗车线,洗车时无需配备司机,信号系统自动接收洗车机发来的洗车线状态和清洗模式,然后控制车辆以设定的模式和速度通过洗车机,完成洗车作业,避免人工驾驶产生的误操作,列车自动换端节省时间,提升洗车效率。
为实现全自动洗车功能,车辆段洗车库需配置可与信号系统联动的全自动驾驶洗车机。
3.4 试车线功能的差异
常规车辆段试车线主要对列车的牵引和制动性能进行动态试验,包括起动、加速、运行、制动状态试验和运行数据的检查、测试,试车时列车需司机人工驾驶控制。全自动运行区的试车线,在常规试车线动态试验内容的基础上,增加了对全自动无人驾驶功能的测试,包括列车自动休眠、自动唤醒、自动开门关门、自动停车、自动换端等。
4 结语
本文通过全自动驾驶车辆段与常规车辆段设计方案的比较分析,以福州全自动驾驶车辆段设计为例阐明了全自动驾驶车辆段的特点,与常规工艺设计相比,全自动驾驶车辆段有以下的改变:
(1) 段内进行全自动运行区域与非全自动运行区的划分,并用门禁及围蔽进行隔离。
(2) 段内增加驾驶模式切换的转换轨。
(3) 停车列检库内划分若干个防护分区,并用门禁及围蔽进行隔离。
(4) 停车列检库增设通往各防护分区的地下通道和出入口。
(5) 停车列检库设置100%的检查坑。
(6) 增加列车清洗机与信号系统的接口,实现全自动洗车。
(7) 门禁系统与信号、供电、车辆控制系统的联锁。
(8) 试车线增加对全自动无人驾驶功能的测试。
此外,全自动驾驶车辆段还要增强诸多系统,例如,供电系统、广播系统、火灾报警系统、视频监控系统、门禁控制系统等,并能够实现各系统间的联动。
[1] 任安萍.浅谈我国全自动无人驾驶地铁的发展[J].科技视界,2012(25):207-208.
[2] 城市地铁列车全自动驾驶最新发展状况[EB/OL]. (2017-06-15).http://www.sohu.com/a/190453667_703060/.
[3] 任菲. 全自动驾驶地铁车辆检修基地工艺设计研究[J]. 科技创新,2016(10):45.
[4] 郭泽阔. 全自动驾驶车辆段总体布局方案设计[J]. 都市快轨交通,2017(30):42-47.
[5] GB 50157-2013,地铁设计规范[S].
猜你喜欢
制冷与空调(2022年3期)2022-08-01 02:35:20
汽车维修与保养(2021年8期)2021-02-16 00:28:48
小学生学习指导(高年级)(2020年12期)2020-12-15 22:06:34
技术与市场(2020年5期)2020-05-21 00:47:06
铁道通信信号(2020年12期)2020-03-29 06:22:26
工程与建设(2019年2期)2019-09-02 01:34:06
铁道通信信号(2018年7期)2018-08-29 01:17:08
水利规划与设计(2016年10期)2017-01-15 14:01:10
消费电子(2016年8期)2016-05-14 13:53:55
电气化铁道(2016年4期)2016-04-16 05:59:48