基于双方态势的机载光电探测系统的能力研究*
2018-04-20 03:14吴利荣刘小军轩永波边江楠
飞控与探测 2018年3期
王 领,吴利荣,刘小军,轩永波,边江楠
(北京航空工程技术研究中心·北京·100076)
0 引 言
作用距离是机载光电探测系统的综合性能指标,目前国内外已有大量文献对其进行了深入研究[1-4]。然而很多时候,这些研究针对的是机载光电探测系统静态性能的理论研究估算。尽管作用距离模型已经考虑了复杂背景环境的影响,但对于作战环境而言,其对实时性和动态性的考虑仍不充分,需要对其进行优化改进[5-8]。本文基于已有的理论研究成果,在充分考虑影响机载光电探测系统性能的基本因素之外,结合机载光电武器的作战需要,在作战环境下对机载光电探测系统的作战能力进行了深入分析,得出了机载光电探测系统的最佳工作点及作用距离概率包线,为模拟真实的战场环境和在实验室进行试验提供了一定的理论支撑。
1 有效探测范围分析
在实际应用中,机载光电探测系统在作战时往往是全程开启、全程被使用的,因此有效探测范围指的是以不低于一定作战需求的概率发现目标的可信区域范围。通常在作战应用中,我机和敌机的相对运动关系可根据速度矢量的夹角分为迎头探测和尾追探测2种情况。
机载光电探测系统的目标探测范围如图1所示。图中R表示在迎头探测时机载光电探测系统对目标的最大探测距离点,R′表示在尾追探测时对目标的最大探测距离点。根据目标的辐射特性可知,R′>R。φ表示机载光电探测系统在方位方向上搜索视场角的1/2,θ为机载光电探测系统探测器瞬时视场角的1/2。
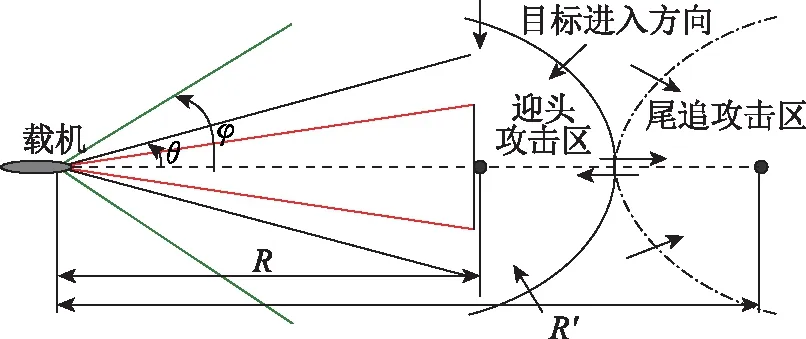
图1 机载IRST的探测目标范围示意图Fig.1 Sketch diagram of detected range by airborne IRST
当目标从迎头区域范围接近载机时,机载光电探测系统对目标探测距离自然存在一个迎头探测包线,在尾追情况下也自然形成尾追探测包线。根据距离探测能力和探测概率,能够得到机载光电探测系统的探测能力范围包线。由于目标与载机在不同空间内态势的变化及目标红外辐射的各向异性,探测概率包线也随态势变化而时刻变化。
2 作战环境下的探测概率包线分析
为了考虑态势在实际情况下的影响,需要首先建立基本战场态势,如图2所示。

图2 基本战场态势示意图Fig.2 Basic battlefield situation indication
图2中,α表示目标相对载机的方位角,转角φ相当于进入角q,使用转角φ可方便建模计算;为了反映作战环境,引入θs和θt(θs∈[0°,360°],θt∈[0°,360°]),它们分别为载机与敌机的航向角,与转角有紧密联系。在实际战场中,这2个参数是可测、已知的,且Δθ∈[0°,360°]。Δθ的取值可能是图中的2种情况,以目标投影在载机坐标系中xt>0、yt>0(即第一象限)为例进行分析。在迎头探测时(即π/2≤Δθ≤π、φ=π-|Δθ|时),目标相对载机的辐射强度为:
(1)
当π<Δθ≤3π/2、φ=π-(2π-|Δθ|)时,目标相对载机的辐射强度为:
(2)
(3)
上述内容均是单次搜索探测过程,而在实际应用中,每一次探测是存在概率特性的,这是由大气背景辐射的易变性、系统噪声、目标搜索概率等一系列概率事件所导致。机载光电探测系统探测目标信噪比越高,探测概率越高,相应的虚警概率就低。以迎头探测为例,机载光电探测系统的信噪比SNR为:
(4)
并且,探测概率Pd、虚警概率Pf和SNR存在如下关系:
(5)
式中, erf(x)为误差函数。图3反映了信噪比、虚警概率和探测概率之间的关系。

图3 信噪比、虚警概率和探测概率之间的关系Fig.3 Relationship between SNR, false alarm probability and detection probability
实际上,式(5)反映了机载光电探测系统的作用距离与探测概率之间的对应关系。对式(5)求导后可以发现,存在一个作用距离R,其对应着最大的探测概率[Pd]max,这就很好地验证了机载光电探测系统存在着最佳工作开启点。探测距离越小,信噪比越高,理论上探测概率值也就越高。但在实际应用中,目标距离越近,目标越容易逃出探测器视场,机载光电探测系统随着目标快速移动,不容易跟踪锁定目标。考虑所有情况下的最佳工作开启点,就得到了最佳开启点探测概率包线;同样,考虑所有情况下对应概率的最大作用距离Rmax,就得到了最大作用距离探测概率包线。
3 探测概率包线计算
根据上述数学模型进行实验仿真,目标为某型战斗机。按照其尺寸比例模型,计算出此飞机各个视图的面积为:Syt=9.25m2,Sce=33.08m2,Sfe=106.12m2;假定目标机飞行速度Vt=408m/s,目标机喷口处尾焰平均半径Rwz=0.51m,尾焰废气温度T0=875K。在水平探测时,设定H1≈H2=8km;在角俯仰探测时,设定H1=8km,H2=10km;探测目标红外波段为3~5μm,机载光电探测系统的探测器参数为:τs=0.9,Δf=105,Ad=2.25×10-8,A0=0.0154,δ=0.9,D*=2.0×1011。
当不考虑目标机相对载机的方位角、仅考虑进入角对探测能力的影响时,以目标机为中心的方位探测能力包线仿真结果如图4所示。图中0°表示载机与目标相对飞行,相对进入角为0°(即迎头探测),而180°则表示机载光电探测系统对目标进行尾追探测。从图4可以看出,方位探测能力包线并不是一般研究结果显示的椭圆形,而是随着相对进入角的不同而时刻变化。在迎头探测时,进入角为0°。0°并不是最佳探测位置,最佳探测位置在±20°左右;同样,在尾追探测时,180°也不是最佳探测位置,最佳探测位置在±170°左右;侧面探测的效果最差。目标机的横向速度相对较快,即距离变化快,容易逃脱机载光电探测系统的探测视场范围。从图4还可以看出,在考虑了探测概率因素时,得到的最大探测概率包线如图4所示,图中最大探测概率包线较最大作用距离包线要小,这也说明了机载IRST最佳工作开启点应该选择在最大探测概率包线上。

图4 以目标为中心的方位角探测包线Fig.4 Target centered angle detection envelope
图5反映的是以载机为中心对目标的方位角的迎头探测,此时不考虑进入角的影响,图中的0表示目标机相对载机的方位角为0°,仅表示目标在载机正前方。图5中的部分探测能力包线是由实际机载光电探测系统的方位视场角±60°决定的,图5同样给出了机载光电探测系统最大作用距离包线和最大探测概率包线,它们都随着方位角偏离0°而大致呈现出余弦规律的减小趋势。
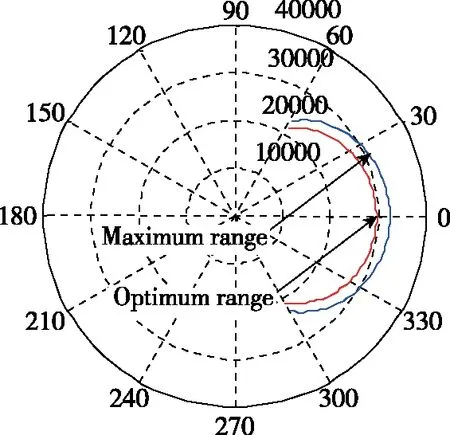
图5 以载机为中心的方位角探测包线Fig.5 Angle detection envelope centered on a carrier
当角俯仰探测不考虑进入角的影响时,给出以载机为中心的俯仰角迎头和尾追探测能力包线仿真结果如图6和图7所示。图中的角度表示俯仰角,(0°,90°)为仰角,(270°,360°)为俯角。总体来看,尾追探测距离较迎头探测远,基本均呈现出一致的变化趋势。从图中可以看出,0°附近的探测效果最好。随着仰角的增大,探测距离逐渐减小,且变化较慢。同样,随着俯角的增大(图中为减小),探测距离也呈现出减小的趋势。当到达一定的俯角后,探测距离减小较快,这是由于载机上方大气层平均透过率较下方大气层平均透过率小,而且下视探测更容易受到地面背景辐射的干扰,因而仰角探测距离变化较慢,而俯角探测距离变化较快。俯角越大,效果越明显。

图6 以载机为中心迎头探测的俯仰包线Fig.6 The pitching envelope of head-on detection centered on a carrier
在实际应用环境中,机载光电系统在其被使用的过程中,既有纯方位探测、纯俯仰探测,而更多时候又有方位探测和俯仰探测同时存在的情形。这就需要综合考虑各种态势下方位探测和俯仰探测的概率包线,不同的概率包线构成了不同态势下的概率包面。
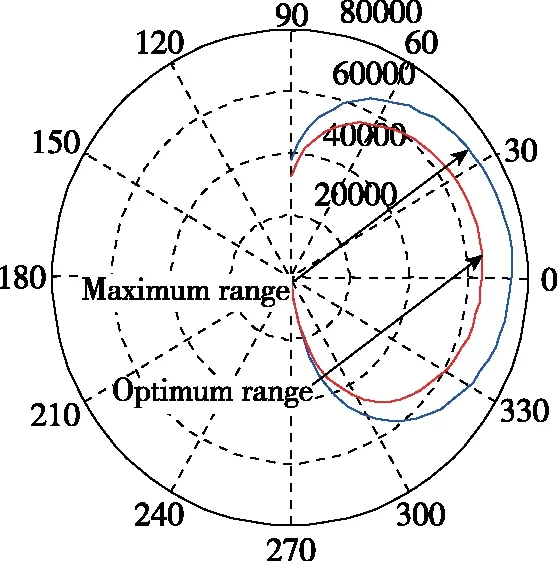
图7 以载机为中心尾追探测的俯仰包线Fig.7 The pitching envelope of tail chase detectiondetected centered on a carrier
4 结 论
本文通过分析作战环境下机载光电探测系统的探测能力,构建了机载光电探测系统方位角和俯仰角的探测能力包线模型,并以此为基础结合作战环境和探测概率特性,建立了作用距离探测概率包线模型。通过仿真分析可以发现,探测能力包线随着相对进入角、方位角、俯仰角、背景辐射和系统性能的变化,而呈现出不同的变化规律,基本符合实际情况。同时,给出了最佳的探测方位。包线的研究能够反映动态情况下的探测性能,从而体现机载光电探测系统在实际应用环境中的性能,为后续的性能评估打下基础。
猜你喜欢
航天电子对抗(2022年4期)2022-10-24
兵器装备工程学报(2020年9期)2020-10-12
科技创新与应用(2019年24期)2019-10-24
民用飞机设计与研究(2019年4期)2019-05-21
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
科技与创新(2016年18期)2016-11-04
科技创新与应用(2016年9期)2016-05-14
物联网技术(2015年4期)2015-04-27
光学仪器(2014年6期)2015-01-22
中国科技术语(2004年3期)2004-03-11