
基于红外识别技术的畜牧小车模型控制系统设计
2018-04-12 06:49李琳琳杨启正贺沅玮罗鑫鑫闫海峰
新疆农垦科技 2018年2期
李琳琳 ,杨启正*,贺沅玮,罗鑫鑫,闫海峰
(1.湖南交通工程学院,湖南 衡阳 421000;2.远大住宅工业集团股份有限公司)
0 引言
畜牧机械有加工机械、饲喂机械、养殖机械、防疫机械等,特别是针对群体饲喂的饲喂机械由于自动化程度低,需要人工协助,劳动强度大,工作效率低,因此,智能化小车是畜牧装备机械发展的全新型科技产物,也是提高生产效率和劳动强度的必然要求。智能化小车可以通过计算机对畜牧机械装备进行行驶控制,无需人工协助,是集中了计算机技术、传感器技术、信息通讯技术、智能化技术、自动行驶技术等综合化程度较高的自动化控制系统[1-3]。本文以畜牧装备小车模型为研究对象,采用红外循迹、红外避障和红外遥控等识别技术,设计了一种基于红外识别技术的畜牧装备小车模型自动控制系统,实现了畜牧装备小车模型自动循迹、避障和远程控制,为畜牧机械装备智能化发展奠定了基础。
1 系统总体结构及工作原理
自动控制系统主要由STC89C52单片机、L298N电机驱动模块、蓝牙模块、红外循迹模块、红外遥控模块、红外避障模块等组成,系统结构框图如图1所示。

图1 控制系统结构
畜牧小车模型自动控制系统以STC89C52单片机为控制核心,当启动循迹模块按钮,系统切换成循迹模式,利用红外循迹模块中的反射式红外传感器识别路面上的黑色引导线并采集识别信号,控制系统根据反馈信号进行算法设计,从而调节小车的行走轨迹,完成循迹畜牧装备小车模型的自动循迹。
当启动红外遥控模块按钮,系统切换成遥控模式,根据红外遥控接收头接收红外遥控器的控制信号,通过控制系统进行解析,控制小车的行走路径,实现畜牧装备小车模型的无线遥控控制。
当启动避障模块按钮,系统切换成避障模式,根据红外避障模块中的反射式红外传感器检测小车行驶前方的障碍物,不断检测探测范围内是否有障碍物,如有障碍物存在,将信号传送至单片机控制系统,根据算法设计的避障路线进行避障,从而实现避障功能。
当小车处于蓝牙模式工作状态时,打开专用机控制小车轨迹的APP,连接蓝牙,当连接成功时,根据手机界面所显示的控件指示,从而实现小车速度和方向的调节,实现小车的蓝牙控制功能。
2 系统主要模块设计
2.1 循迹模块
采用3路TCRT5000反射式红外检测传感器、JY043W型光电管和LM393电压比较器等硬件集成的循迹模块,主要用来识别畜牧装备小车工作过程中的黑白标识物,通过红外传感器检测到的信号,控制直流电机的工作状态,完成畜牧装备小车的自动循迹。此循迹模块结构简单、便于安装,3路反射式传感器分别独立工作,中控板与探头分开,不受安装位置的限制,工作电压为3~6 V,电压相对稳定,探测距离范围为10~120 mm,电路图如图2所示。

图2 循迹模块电路
2.2 红外遥控模块
红外遥控模块主要用来实现红外信息的传送,主要由发射、接收和调制三大部分组成,由红外发射器将调制的编码信号发出,通过红外线传送至接收端,解调为电信号后,传送至单片机主控程序,完成红外信息传递。此红外遥控模块采用HX1838传感器,工作电压为5 V,数字量输出,测试距离为5~8 m,接收频率为38 Hz遥控编码,具有灵敏度高、干扰性强、信息传输可靠、功耗低、成本低等特点,电路图如图3所示。

图3 红外遥控模块电路
2.3 蓝牙模块

图4 蓝牙模块电路
由片内数字无线处理器DRP、数控振荡器、片内射频收发开关、内置ARM7嵌入式处理器等硬件集成的HC-06蓝牙4.0模块,主要用来接收射频信号,经蓝牙收发器直接传输到基带信号处理器,与PC机上的RS232通信(图4)。此蓝牙模块具有超低待机功耗,通讯距离为10~20 m,工作电压范围在3.6~6.0 V,传输速度为3 kb/s,反应速度小于0.4 s,具有主从一体的通讯方式等特点。
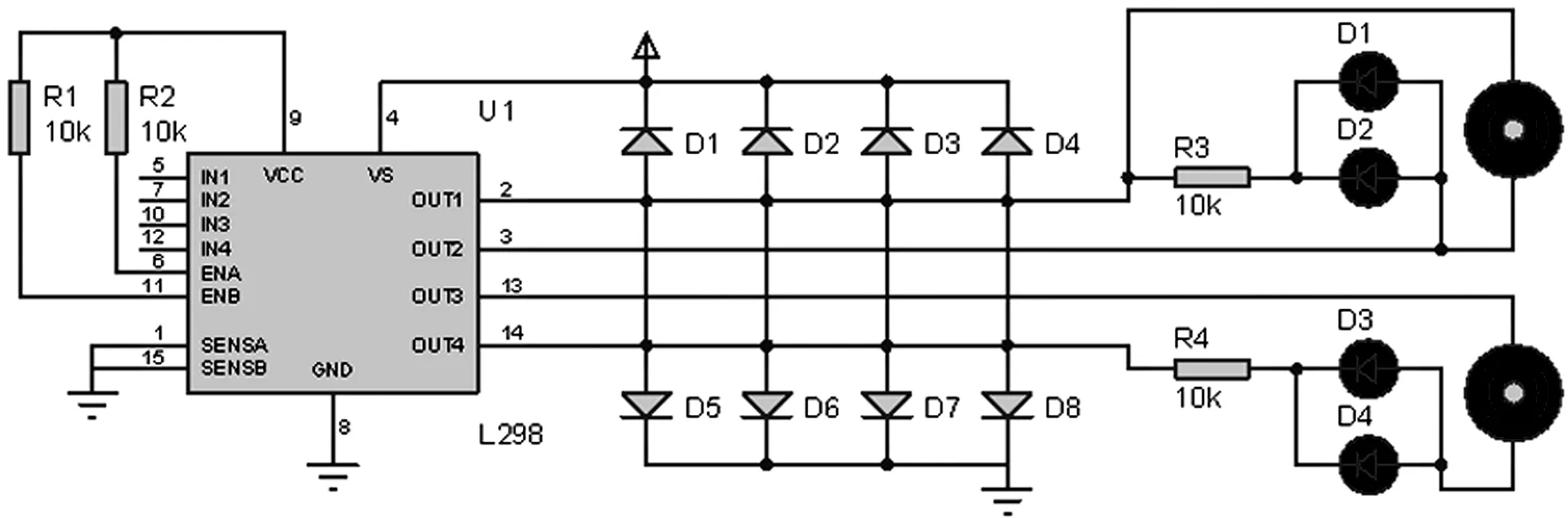
图5 电机驱动模块电路
2.4 红外避障模块
红外避障模块主要用来检测前进方向是否存在障碍物,根据红外传感器反射回来的信号,控制小车的转向,从而准确的避开障碍物。该模块检测距离为2~30 cm,检测角度为35°,工作电压范围为3.3~5.0 V,具有距离可调节、干扰小、便于安装、应用广泛、使用方便等特点,红外避障传感器工作原理和红外循迹传感器的工作原理基本相同。
2.5 电机驱动模块
电机驱动模块采用L298N芯片构成的H桥电机驱动,电路图如图5所示,主要包括4个三极管和1个电机,4个三极管组成H桥的垂直线,而电机是H桥的横线,根据三极管的导通状态来控制电机的转向,同时保证H桥同侧的三极管不能同时导通。
3 系统测试与分析
3.1 硬件测试
按照预先设计的畜牧装备小车模型自动控制系统电路原理图,将硬件电路图中各元件焊接在一起组成控制板,然后采用万用表测试控制板的电路连接状态,用万用表的红、黑表笔来测试电路板上每条走线,测量得到每条线路上的电阻值都非常小,证明线路连接完好无损,没有断路现象。
3.2 软件调试
在keil软件中将编写好的畜牧装备小车模型控制程序调试完毕,通过PZ-ISP烧录软件将调试完的程序烧录至单片机,利用单片机开发板进行实验测试,测试结果同理论相一致。
4 小结
(1)以畜牧装备小车模型为研究对象,采用红外识别自动控制系统,主要由红外循迹模块、避障模块、红外遥控模块、蓝牙模块和电机驱动模块等组成,实现了畜牧小车模型的自动化控制。(2)硬件测试结果表明,线路连接完好无损,未出现断路现象;软件调试结果表明,实验测试结果与理论分析相一致[4-5]。
[1]卜雪民,钱峰.基于DSP的智能车辆系统移动小车的设计[J].电子测量技术,2007,30(10):81-83.
[2]罗锡文,区颖刚,赵祚喜,等.农用智能移动作业小车模型的研制[J].农业工程学报,2005,21(2):83-85.
[3]石伟.基于Labview和PID控制器的自动移动小车控制系统的实现[J].工业控制计算机,2013,26(4):75-77.
[4]高振新,孙建红.基于MSP430的智能循迹运料小车设计[J].实验室研究与探索,2016,35(8):71-74.
[5]陶玉贵,章杰,汪金宝.基于STC89C52RC的智能小车设计[J].实验室研究与探索,2013,10(25):61-63.

猜你喜欢
工业设计(2022年7期)2022-08-12
湘潭大学自然科学学报(2022年2期)2022-07-28
小学生优秀作文(低年级)(2021年11期)2021-12-06
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
语文世界(小学版)(2019年2期)2019-02-24
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
电子制作(2017年1期)2017-05-17
小天使·一年级语数英综合(2014年7期)2014-06-26
环球时报(2012-03-28)2012-03-28
