
基于手机APP的畜牧装备模型小车控制系统设计
2018-04-12 02:19李琳琳陈正龙彭金艳闫海峰
新疆农垦科技 2018年10期
李琳琳,马 娇*,陈正龙,彭金艳,闫海峰
(1.湖南三一工业职业技术学院,湖南 长沙 410000;2.远大住工有限公司)
0 引言
随着科技的发展,畜牧机械也在不断的发展,自动化程度逐渐提高。目前犊牛饲喂装备技术的自动化程度较低,需要人工协助,劳动强度大、工作效率低,而智能化小车是畜牧装备机械发展的全新型科技产物,也是提高生产效率和劳动强度的必然要求。根据现有犊牛饲喂技术现状,设计了智能化犊牛饲喂装备的实验装置小车模型,可以通过计算机的程序编程来实现其对行驶方向、启停及速度等控制量的控制,不需要人工的外加操作,是一个集信息感知、规划决策、自动行驶等系列功能于一体的综合性自动控制系统[1-3]。本文以犊牛饲喂实验装备小车模型为研究对象,采用蓝牙、PWM 调速、信息通信、导航和人工智能等技术,设计了一种基于手机APP 的犊牛饲喂装备模型小车控制系统,以实现犊牛饲喂装备小车模型自动控制,为犊牛饲喂装备的智能化发展奠定基础。
1 软件总体设计
1.1 软件需求概括
软件控制需要实现对犊牛饲喂小车的行走速度、行走路径与控制模式进行选择,综合利用手机在人们日常生活中的普遍性、便携性和交互性好等特点,采用手机APP 通过蓝牙模块进行单片机与手机的通信,其中单片机主体程序采用C 语言进行编程,手机APP 采用Java 语言进行编程,从而实现犊牛饲喂小车的信息感知、规划决策、自动行驶等一系列功能。
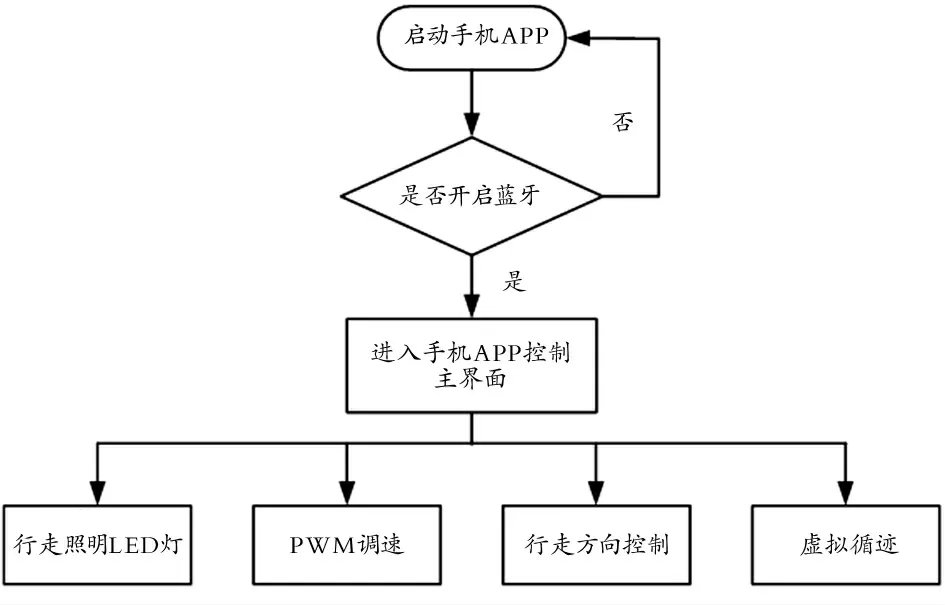
图1 流程图
1.2 软件整体流程图设计
基于手机APP,通过蓝牙模块建立手机与单片机的通讯,从而控制犊牛饲喂小车实现点亮行走照明LED 灯、PWM 调速、行走方向控制、虚拟循迹等饲喂小车的智能模式,也可在手机上进行初始化设置,其整体设计流程图如图1 所示。
2 软件各部分功能

图2 系统界面
手机APP 对犊牛饲喂小车的控制分为四大模块:点亮行走照明LED 灯、PWM 调速、行走方向控制和虚拟循迹。首先开启手机APP,然后根据提示打开蓝牙,蓝牙打开后与蓝牙模块进行连接,从而实现犊牛饲喂车预定功能(系统界面如图2 所示),否则所设的一切功能将不能正常使用。
2.1 行走照明LED 灯
犊牛饲喂装置在实际操作过程中,时常会用到照明灯,所以在犊牛饲喂小车上安装了LED 灯,只需点击图2 中的“灯开关”,便可进行一键操作(一键打开,一键关闭)。
2.2 PWM 调速
犊牛饲喂机在实际操作过程中的行走速度要求不一,在图2 的界面上可进行调速(即改变PWM 的值),然后点击“一键修改”,如需保存所修改参数,则再点击“保存参数”。
2.3 行走方向控制
犊牛饲喂机在实际操作过程中,有时会用到手动操作,此时手指按住图2 中圆环中心位置向不同的方向滑动,则小车就会根据人们自己的实际需要行走。
2.4 虚拟循迹
当需要犊牛饲喂小车在无需人为操控的情况下进行工作时,我们可以使用虚拟循迹功能,在循迹界面上绘制小车行走的路线(如图3所示),如果所绘制路线有误,则点击“清除轨迹”,当确定绘制轨迹无误后,点击“开始循迹”(如图4所示)。如果小车行走路线与实际偏差较大,则需要对小车进行校准,首先采取旋转校准(如图5所示)或前进校准(如图6所示)的方式对小车进行状态校准。

图3 循迹路线界面
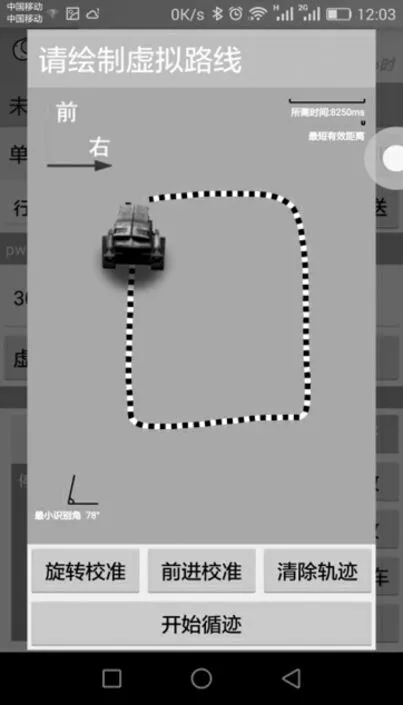
图4 开始循迹界面
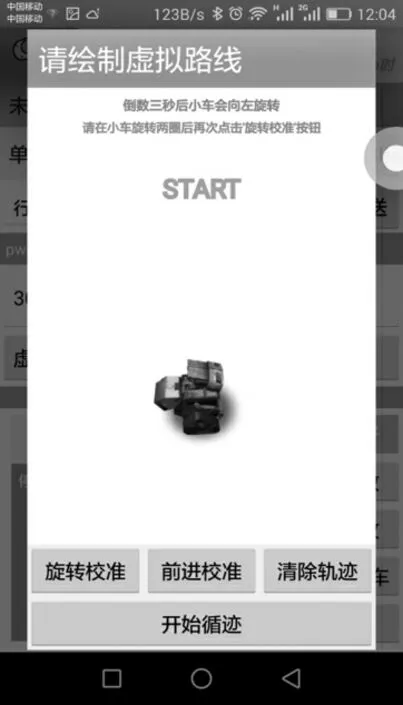
图5 旋转校准界面

图6 前进校准界面
3 系统测试与分析
3.1 硬件测试

图7 电路板图
按照预先设计的犊牛饲喂小车模型自动控制系统电路原理图,将硬件电路图中各元件焊接在一起组成控制板,然后采用万用表测试控制板的电路连接状态,焊接后的电路板如图7 所示。用万用表的红、黑表笔来测试电路板上每条走线,测得每条线路上的电阻值都非常小,证明线路连接完好无损没有断路现象[4-6]。
3.2 软件调试
在Keil 软件中将编写好的犊牛饲喂装备小车模型控制程序调试完毕,通过PZ-ISP 烧录软件将调试完的程序烧录至单片机,利用单片机开发板进行实验测试,测试结果同理论相一致。
4 结论
(1)以犊牛饲喂装备小车模型为研究对象,采用信息通信、导航和人工智能技术的自动控制系统,主要由蓝牙连接模块、PWM 调速模块、行走方向控制模块和虚拟循迹模块等的软件部分组成,实现犊牛饲喂装备小车模型的自动化控制;(2)硬件测试结果表明,线路连接完好无损,没有断路现象,软件调试结果表明,实验测试结果与理论分析相一致。
猜你喜欢
工业设计(2022年7期)2022-08-12
湘潭大学自然科学学报(2022年2期)2022-07-28
今日农业(2021年7期)2021-07-28
现代畜牧科技(2021年4期)2021-07-21
现代畜牧科技(2021年4期)2021-07-21
汽车与驾驶维修(维修版)(2019年4期)2019-05-09
家庭影院技术(2018年10期)2018-11-02
家庭影院技术(2018年3期)2018-05-09
电子制作(2017年1期)2017-05-17
中国乳业(2016年4期)2016-11-07
