基于WBS综合方法的导引头模拟系统效能评估
2018-04-12 06:15崔连虎
指挥控制与仿真 2018年2期
田 龙, 崔连虎
(解放军91336部队, 河北 秦皇岛 066001)
导引头是一种安装在导弹头部的探测装置,用来完成对目标的搜索、识别和跟踪,给出制导所需的控制信号[1]。导引头模拟系统可以在复杂电磁环境中有效地模拟出导弹的搜索截获与跟踪过程,可用于保障电子对抗系统和舰载武器系统等试验任务,在海上靶场试验任务中的需求愈发明显。
导引头模拟系统在进行海上试验任务时,一般都需要调动大量保障资源。海上试验任务的组织与实施相当复杂,工作量庞大,既要保证所有设备满足开机条件,又要保证各系统检测指标达到任务要求,才能下达试验任务开始的命令。目前有些任务在组织过程中仍采用片面的经验估计方法和人工呼点方法进行试验可行性分析与试验开始条件判别。这样不仅需要耗费大量的试验准备时间,也不能对试验成功率给予全局性的充分保证。如果能在任务开始前根据任务要求与装备状态对是否满足任务条件有一个定量的评估分析,那么对试验任务的顺利组织实施将起到重要的助推作用。
本文将工作分解结构(Work Breakdown Structure,WBS)引入导引头模拟系统海上试验任务效能评估中。WBS是指用系统工程的思想方法,分析研究项目的总目标和总任务,将项目的总系统范围分解为若干相互联系又相互影响、相互依赖又相对独立的基本项目单元,以这些基本项目单元作为项目管理的对象,满足项目设计、计划、控制、管理和维护的需要[2-3]。采用WBS方法将总试验任务分解成若干相互联系的子任务,子任务采用ADC效能模型[4-5]进行评估,再采用层次分析法(Analytic Hierarchy Process,AHP)[6]计算子任务权重,并对分布在不同评估时间采样点的子任务进行权重动态赋值,最终算得系统总任务动态效能评估值。
1 基于WBS的试验任务建模
1.1 舰载导引头模拟系统效能
系统效能是预期一个系统在规定的时间内和规定的条件下,满足特定任务要求程度的度量[7-8]。导引头模拟系统保障海上试验任务效能可定义为在规定的任务时间内和规定的任务条件下,满足特定的海上试验任务要求的程度。它是根据不同试验任务的具体情况,随着装备的使命任务、性能指标、结构组成、任务环境、任务要求、任务方案、任务时间和任务海域海况等诸多因素而变化的。规定的时间受试验任务的复杂程度影响,舰艇出海一次可能会持续很长时间;规定的条件根据试验任务不同也有所差异,涉及任务海况、参试人员、装设备状态等诸多因素影响。
1.2 WBS模型结构
导引头模拟系统海上试验任务是一项系统工程,需要各系统相互配合完成规定的任务。WBS工作分解结构作为全面系统工程项目分析管理的一种重要方法,属于复杂大系统分析和控制工具,从全系统、全过程、全寿命角度进行管理与控制。本文将舰艇搭载导引头模拟系统一次出航期间特定的试验任务要求定义为效能评估的一个总任务要求,采用WBS方法将该总任务分解为若干模型需要的子任务。WBS模型结构分为任务结构分解和活动结构分解。
1.2.1任务结构分解
本文按照试验总任务的要求以及导引头模拟系统的组成和性能指标,将总任务分解成相互独立又相互影响的子任务基本单元。任务结构按照如下六项原则分解:1)采用层次化树形任务分解结构;2)将总任务自上而下逐步细化分解,直至适合进行有效效能分析的层次,粒度不能太大或太小;3)子任务没有数量限制;4)各子任务应且只应在总任务中出现一次;5)各子任务之间无重叠,不存在包含与被包含关系;6)分解后的子任务应能百分之百覆盖总任务。
以导引头模拟系统典型海上试验任务为例,要求导引头模拟系统完成多科目干扰效果试验任务。该总任务可以分解为13个子任务,如表1所示。每个子任务均位于总任务树形结构的同一层,若干个设备或分系统共同完成某个子任务。
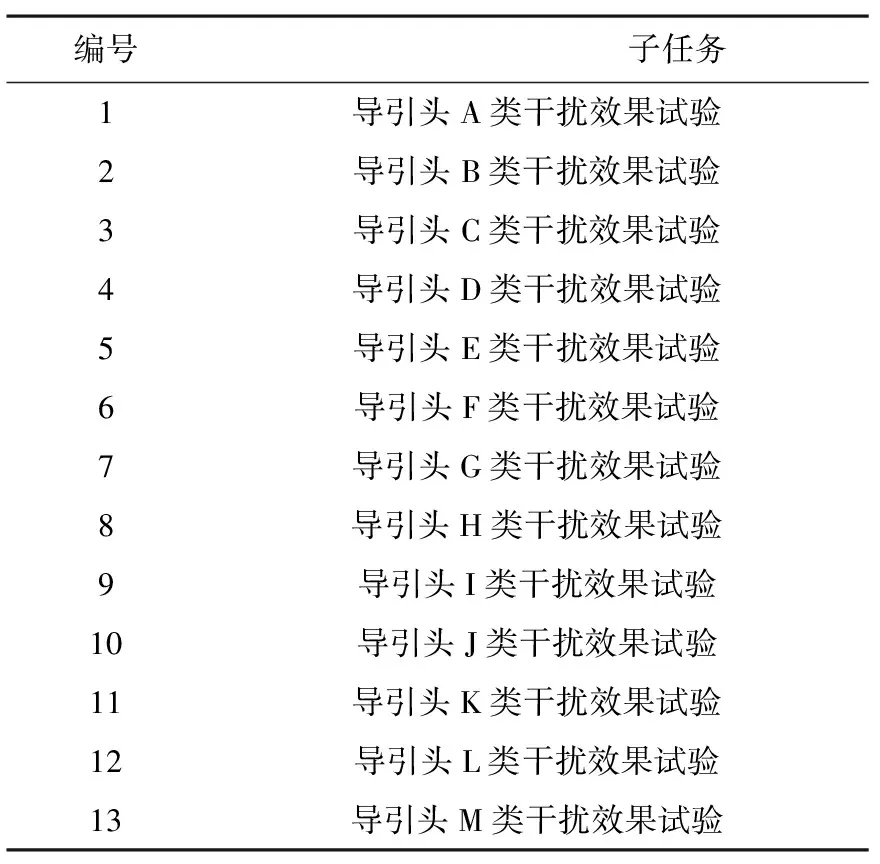
表1 WBS典型海上靶场试验任务结构分解
1.2.2活动结构分解
活动结构分解是将总任务分解为若干关键项目并分析其时间逻辑关系。以导引头模拟系统典型海上试验任务为例,按照试验任务大纲规定的科目顺序及时间,在时间轴上对上文将总任务分解出的全部子任务建立前、后置逻辑关系图,得到导引头模拟系统海上试验总任务活动结构分解如图1所示。任务从t0时刻正式开始,到t1时刻结束,子任务按科目顺序以编号形式在图中标明。

图1 WBS试验总任务活动结构分解图
2 基于ADC方法的子任务建模
2.1 子任务设备结构模型
根据子任务的任务要求和任务流程,分析参试装备的组成结构和工作原理,建立各子任务的设备结构模型。建模原则:根据任务需要添加全部设备,串行工作的设备为串联关系,并行工作和双机备份的设备为并联关系。
导引头模拟系统包含多套导引头模拟设备,每套设备都包含有导引头模拟器、导引头控制台、导引头数据采集器、导引头稳压电源和导引头稳定跟踪平台等设备,部分设备可以根据具体任务情况互为备份以提高效能。
某次典型海上试验任务中,以导引头H类干扰效果试验子任务为例,该子任务设备结构模型如图2所示,中心计算机系统、通信导航系统、航海动力系统采用黑箱模型,重点关注导引头模拟系统,导引头模拟器、控制台、数据采集器、稳压电源和稳定跟踪平台均分别采用双机备份的并联形式。

图2 导引头H类干扰效果试验子任务设备结构模型图
2.2 基于ADC模型的子任务效能评估
子任务是由逻辑关系相对简单的设备子系统共同完成的,所以其效能评估可以采用传统的ADC模型[4-5,9]:
E=ADC
(1)
式中,E为系统效能向量,A为可用度向量,D为可信赖性矩阵,C为固有能力向量。
可用度行向量A,是任务执行初始时刻系统状态的度量,由系统在初始时刻处于所有可能状态的概率组成。求取A的关键是对系统的划分和系统状态的定义,子任务设备构成不同,其可用度向量阶数也不同,可根据子任务系统中设备串并联关系及各设备状态来确定其状态数,并可简化合并一些同类状态。假设一个子系统有n个状态数,那么有
A=[a1a2…an]
(2)
其中,ai可由各设备的平均无故障时间(MTBF)和平均故障修复时间(MTTR)计算得到。例如某子任务由双机热备份设备并联系统完成,系统状态可分为完好、轻微受损、故障三种,那么:
(3)
可信赖性矩阵D(t),是任务执行过程中t时刻系统状态的度量,描述系统从某一种状态转移到另一种状态的能力。
(4)
其中,dij(t)是系统在t时刻由状态i转移到状态j的概率,受可靠性和维修性影响。
导引头各分系统故障和修复一般可认为服从指数分布,即可靠性和维修性分别为:
(5)
(6)
固有能力向量C,是已知任务执行过程中t时刻的所有状态,系统完成任务要求的概率列向量。
C=[c1c2…cn]T
(7)
式中cj(j=1,2,…,n)是系统在t时刻处于状态j时满足任务要求的概率。
分析导引头模拟系统组成及其所需承担的任务,建立体现海上靶场试验能力的固有能力指标体系,采用AHP法计算各子任务固有能力向量。由相关专家打分给出系统各性能指标值μ(Xi)及各指标相对重要关系,计算出相应的权重值ωi,最后按理想点法综合评估计算。假设某子任务的设备状态可确定为3种:完好状态、轻微受损状态、故障状态,则系统在完好状态下的能力向量为
(8)
系统在轻微受损状态下的能力向量C2=1-C1,系统在故障状态下的能力向量C3=0。
3 基于AHP的子任务权重计算及综合效能评估
3.1 基于AHP的子任务权重计算
采用WBS方法将总任务分解成若干子任务后,需要求取每个子任务相对于总任务要求的权重,各子任务权重反映其相互间重要性差异。本文采用AHP法[6,10]计算子任务权重。
1)专家小组对每个子任务两两比较给出相对重要性评判,据此构建判断矩阵:
(9)
其中,aij为子任务i相对于子任务j的重要性等级;
2)AHP法的关键是计算出判断矩阵的最大特征根及其特征向量。判断矩阵A与其最大特征根λmax,及其相应的特征向量W之间的关系为
AW=λmaxW
(10)
W经归一化后,即为表征同一层次子任务对总任务相对重要性的权重向量。通过求和法求解子任务权重向量ωi的计算公式为:
(11)
3)由于客观事物的复杂性以及主观认识上存在的多样性和模糊性,要求专家组打分得到的判断矩阵具有完全一致性是不现实的,但应具有基本的一致性。权重结果最终确定之前对判断矩阵进行一致性检验。
(12)
式中,n为判断矩阵阶数;CI(n)为判断矩阵的评价一致性指标,可通过判断矩阵的特征根求出;RI(n)为平均随机一致性指标,随n取值变化而变化,可查表获得;CR(n)为判断矩阵随机一致性指标。当CR(n)≤0.1时,可以认为评价大致相容,分析结果可信;否则,应重新调整判断矩阵,直至具有满意的一致性为止。
对于上述导引头模拟系统典型海上试验总任务,按照AHP法可计算得到各子任务权重,各权重值总和为1。
3.2 子任务权重动态赋值及总效能计算
导引头模拟系统海上试验任务具有鲜明的时变特性,其效能曲线应该是能够反映时域特征的函数。为了体现时间轴上效能函数的变化趋势,应该分时段根据系统的不同状态计算不同时刻的系统效能。
在试验任务中,导引头模拟系统各分机设备开机时间是不同的,也就是说子任务执行时间各异,在效能评估的各时间采样点仅执行部分子任务,故需要根据子任务分布情况对权重重新动态赋值。
假设某个时间采样点ta有m(m≤13)个子任务正在执行,则要重新计算各子任务在ta时刻的权重值。ωi(i=1,2,…,m)为子任务i的原权重,那么ta时刻的新子任务权重总和ωh可通过该时刻正在执行的m个子任务权重求和得到。子任务i在ta时刻的新权重ωi'(i=1,2,…,m)为
(13)
导引头模拟系统在ta时刻的系统总效能为
(14)
式中,g(ta)为系统的总效能函数;Ei(ta)为子任务i的效能函数。
4 综合效能评估步骤及仿真算例
基于WBS建模方法、ADC子任务评估方法和AHP子任务权重计算方法对导引头模拟系统典型试验任务进行效能评估仿真,总效能评估结果为反映系统完成该任务能力程度的概率曲线,该曲线能动态反映总任务各时刻的效能情况,即任务全过程各个时间点各设备对试验任务成功完成的影响。评估步骤可概括为:
1)采用WBS方法对试验任务进行分解,建立子任务模型。
2)采用ADC法,先获取各子任务的A、D、C矩阵,然后据此计算各子任务的效能函数。
3)采用AHP法,依据专家评判结果计算子任务权重,并进行一致性检验。
4)根据任务起止时间确定评估周期。按照采样点的子任务分布情况,重新对子任务权重进行赋值,最后计算得到系统总效能函数,并绘制曲线。
针对上述导引头模拟系统典型试验任务,采用本文提出的效能评估方法和步骤,将任务执行时间脱密量化,经过仿真评估得到系统效能评估曲线如图3所示。由效能曲线可知,完成此次试验任务的概率在0.9以上。t0时刻任务开始,效能值为1;t1时刻、t3时刻、t4时刻、t5时刻、t7时刻和t8时刻效能值从稳定状态上升至1,说明前面执行的子任务结束,新的子任务开始;t2时刻效能值有所提高后逐渐趋于平稳,说明有低效能的子任务结束;t6时刻效能值下降后缓缓趋于平稳,说明有新的低效能子任务加入。根据效能曲线的变化情况,试验人员可以分析检查引起总效能降低的子任务所对应的设备状态,查找问题环节,为设备维护管理和试验圆满完成提供重要依据。
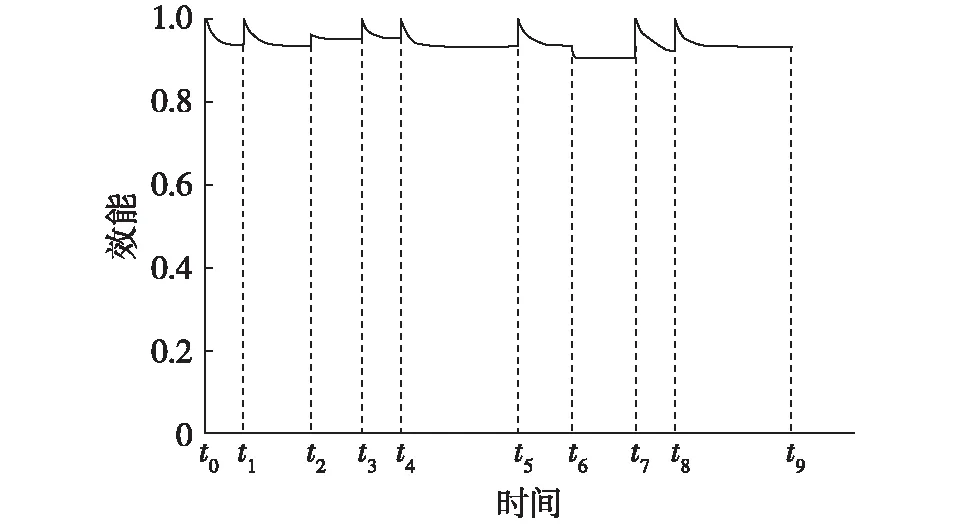
图3 导引头模拟系统仿真算例综合效能评估曲线
5 结束语
本文提出通过WBS建模降低系统复杂度,通过AHP动态权重赋值改善ADC效能函数时变特性的综合评估方法,不仅可应用于导引头模拟系统海上试验任务综合效能评估,也可以应用于工业、制造业等多种复杂大系统的效能评估中,为装备的维护管理、领导的指挥决策以及任务的顺利组织实施提供必要依据。本文提出的方法主要用于试验任务事前评估使用,下一步还可以把任务执行过程中效能实时评估作为研究重点,以期实时提高任务效能,保证任务能顺利完成。
参考文献:
[1]韩晓东,谭智,舒汀,等.复杂电磁环境下有源相控阵雷达导引头抗干扰试验与效能评估技术研究[J].制导与引信,2014,35(3):1-5.
[2]杨奕飞,李少华,戴跃伟,等.基于WBS的船载测控系统效能评估研究[J].现代雷达,2015,37(9):13-17.
[3]樊延平,郭齐胜,李亮,等.基于WBS的装备作战需求联合论证任务流程设计方法[J].火力与指挥控制,2015,40(7):62-66.
[4]李彤岩,王培国,张婷.基于ADC模型的通信网络效能评估方法研究[J].电子技术应用,2015,41(9):18-20,28.
[5]史军涛,朱敬莉,周铭,等.基于改进ADC模型的通信对抗装备作战效能评估[J].舰船电子对抗,2012,35(6):84-86.
[6]任猛,周伟静,郭建华,等.基于AHP的靶场测控系统综合性能评估[J].电讯技术,2012,52(12):1876-1880.
[7]郭齐胜.装备效能评估概论[M].北京:国防工业出版社,2005.
[8]吴彦锐,伍友利,于兴华,等.基于作战仿真的导弹武器统作战效能评估[J],火力与指挥控制,2014,39(9):19-27.
[9]刘花云,张贤椿.基于ADC的导弹武器系统效能评估方法[J].兵工自动化,2015,34(8):11-14.
[10] 吴智辉,张多林.AHP法评估地空导弹武器系统效能[J].战术导弹技术,2003(4):8-12.
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
心理学报(2022年5期)2022-05-16
当代陕西(2020年17期)2020-10-28
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
火力与指挥控制(2019年6期)2019-07-20
人大建设(2018年5期)2018-08-16
证券市场红周刊(2018年3期)2018-05-14
电子制作(2018年1期)2018-04-04