
一种波形相似度的车辆检测融合算法*
2018-04-11 06:26张足生邓见光赵铁柱袁华强
传感技术学报 2018年3期
张足生,邓见光,赵铁柱,袁华强
(东莞理工学院计算机与网络安全学院,广东 东莞 523808)
在众多的交通问题中,城市中心区交通拥堵及路边停车问题尤为突出,繁忙时段寻找停车位非常困难。无线磁阻传感器网络WMSN(Wireless Magnetic Sensor Network)[1-2]利用地磁扰动检测原理实现车辆检测,该技术具有低成本,低功耗,微型化等特点,逐渐被用于智能交通信息采集领域[3-4]。在路段进出口及路边停车位上部署传感器节点,可实现动态与静态车辆检测。
①动态车辆检测:基于磁阻传感器的动态车辆检测算法已有较多的研究成果。加州大学伯克利分校Cheung S等人[5-6]利用磁阻传感器实现了道路车流量,车速和车辆类型检测,基于动态基线、阈值、状态机等机制实现了车辆检测算法,利用一对传感器节点实现了车速监测算法。Taghvaeeyan S等人[7]基于方形永磁体磁场模型推导出了一种车辆运动位置估计算法,并设计了一种便携式路边车辆计数、分类和速度测量的磁传感器系统[8]。Wang R等人[9-10]提出波形相关检测算法,通过计算实际信号与参照信号(高斯函数)的相关性来实现车辆检测。Wahlström N等人[11]基于非线性变换理论提出了车辆方向检测方法。王玮等人[12]提出了一种双磁阻节点互补的低功耗车辆检测方法。
②静态车辆(停车)检测:车辆停泊后会对磁场形成一个稳定的干扰,提取车辆静止后的稳定磁场漂移量,这是目前主流的停车检测思想[13],使用单阈值可实现该特征的检测,文献[14]提出了一种自适应阈值算法。文献[15]考虑到车辆驶入或驶离停车位过程中磁信号会形成较剧烈的上下波动,提出了一种改进的极小极大值算法实现该波动特征的检测。文献[16]将停车过程划分为驶入、停泊、驶离3个阶段,其特征分别总结为剧烈扰动、稳定漂移、剧烈扰动,利用多阈值机制实现3个阶段的特征检测。文献[17]基于模糊逻辑理论(Fuzzy Logic Theory)[18]提出了车辆检测算法,输出相应停车位是否被占用的概率值。文献[19]采用了类似Wang R等人[9]的思想,利用节点的磁场波形与参考的基准波形进行比较实现停车检测。本课题组成员关向科在文献[20]提出了一种基于无线磁阻传感器网络的协同决策停车检测方法,但是该方法存在以下缺陷:其检测的理论基础是假定车辆磁场具有左右对称性,而现实的车辆磁场根本不存在这种对称性;另外该文献没有给出可行的多个传感器之间波形相似性判定方法。
综上所述,现有研究成果主要集中在单个传感器信号的特征分析与检测,也有少量算法利用采样波形与参考波形的相关性来实现车辆检测,但该类算法的参考信号没有一般性,不能反映实际的信号变化特征。导致停车检测算法误差的主要原因是磁信号容易受到相邻车位停车干扰,在低信噪比情况下,相邻停车位车辆带来的干扰信号与本车位车辆停泊信号无法分辨,本文针对该问题提出一种数据融合算法,基于时间序列模型,提出了车辆磁信号的波形相似度计算方法和归一化方法,设计了信号相关传感器节点数据融合车辆检测算法,提高了检测精度。
1 磁信号相似度计算方法
1.1 干扰信号特征
三轴各向异性磁阻AMR(Anisotropic Magneto-Resistive)传感器可检测到x,y,z3个坐标方向的地磁强度。AMR传感器在k时刻采集的信号Ms(k)如式(1)所示,式中Gs(k)为背景地球磁场信号,其取值与地球磁场分布有关;Ns(k)为干扰磁场信号;Vs(k)为目标车辆扰动磁场信号。
Ms(k)=Gs(k)+Ns(k)+Vs(k)
(1)
干扰磁场信号Ns(k)主要是AMR传感器受相邻停车位的车辆干扰的影响,如图1所示B、A、C为部署在停车位中央的3个磁阻传感器,车辆V进入A停车位,同时会对节点B和C产生磁干扰信号。不同车辆对地磁场干扰信号的大小不同,含铁磁性材料较多的车辆干扰地磁场产生的信号范围较大,称为强磁车辆SMV(Strong Magnet of Vehicle),它的信号强度不仅影响到本车位,而且还能够影响到相邻车位,经过实验得知不会影响到间隔的车位。含铁磁性材料较少的车辆干扰地磁场产生的信号范围较小,称为弱磁车辆WMV(Weak Magnet of Vehicle),它的信号只能影响到本车位,对相邻的车位没有影响或者影响很小,可以忽略不计。
将车辆抽象为一个磁矩为m的磁偶极子[25],该磁偶极子在空间中的坐标为(x,y,z),传感器的坐标为(x0,y0,z0),则三轴磁阻传感器感知到的磁场强度可以表达为:
(2)
(3)
(4)
式中:mx,my,mz分别是磁矩在x,y,z三轴上的分量,u0为真空中的磁导率,r为磁偶极子到传感器的距离。但是磁偶极子模型只适合于远场计算(车辆与传感器的距离为R,车辆的尺寸为L,当R≫L时),不合适于近场计算(车辆接近传感器或位于传感器上方时,R≪L),停车检测属于近场计算,磁偶极子模型不适用,所以车辆检测的主要方法是以经验数据的特征观察与统计分析为主。
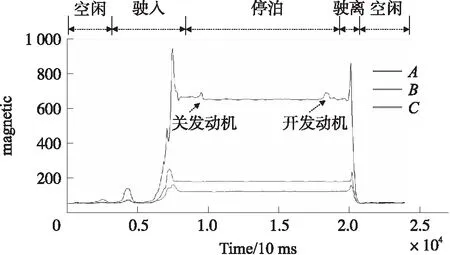
图2 强磁场车辆产生的干扰信号,相邻传感器信号相关
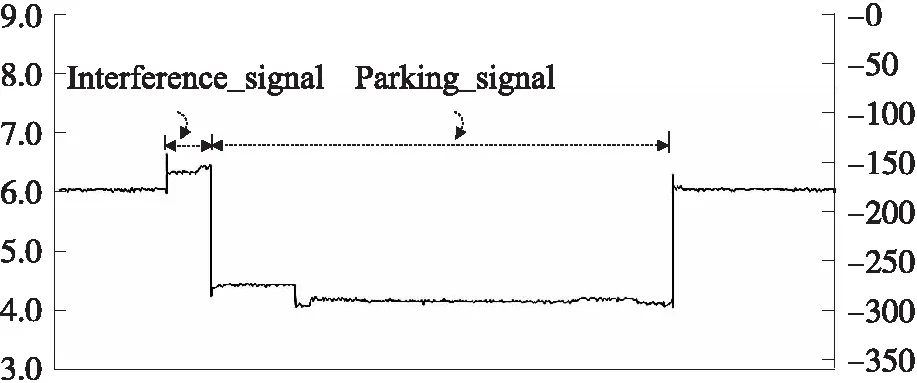
利用HMC5883L三轴传感器[21]采集停车磁场信号,x,y,z三轴磁信号经过滤波和合成后转换为一个正值信号,用g表示。如图2所示,为一辆强磁车辆停泊于如图1所示的A泊位,A、B、C3个传感器都感应到了磁场扰动。整个停车过程包括3个阶段:车辆驶入、停泊、驶离,图2标识了各阶段的磁场变化情况。在驶入与驶离阶段都会引起磁信号的波动。在空闲及停泊状态时,磁信号都是平稳状态。
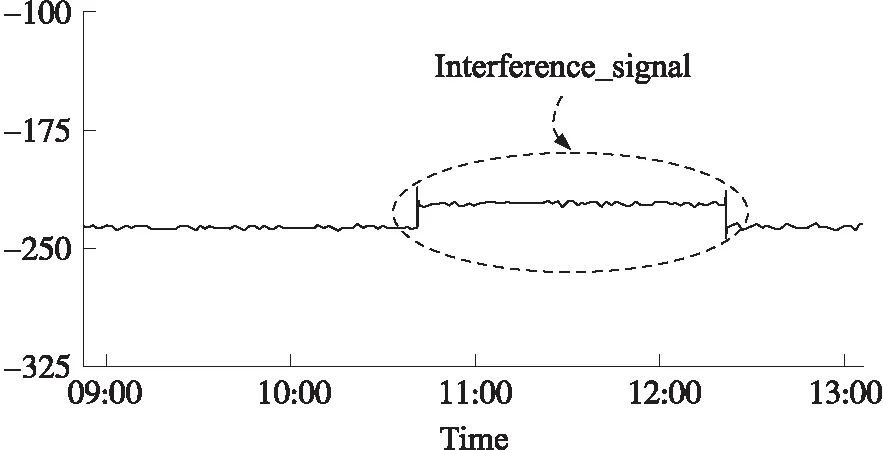
图2中B的磁信号为A车位强磁车辆停泊而带来的干扰信号,标记为NB。如图3所示为一辆弱磁车辆停泊于B停车位,传感器节点B感知的磁场扰动为VB,即目标车辆磁信号。对比图2和图3中节点B的信号,仅考察单个传感器的信号是无法区分相邻停车位车辆带来的干扰信号与本车位车辆停泊信号。
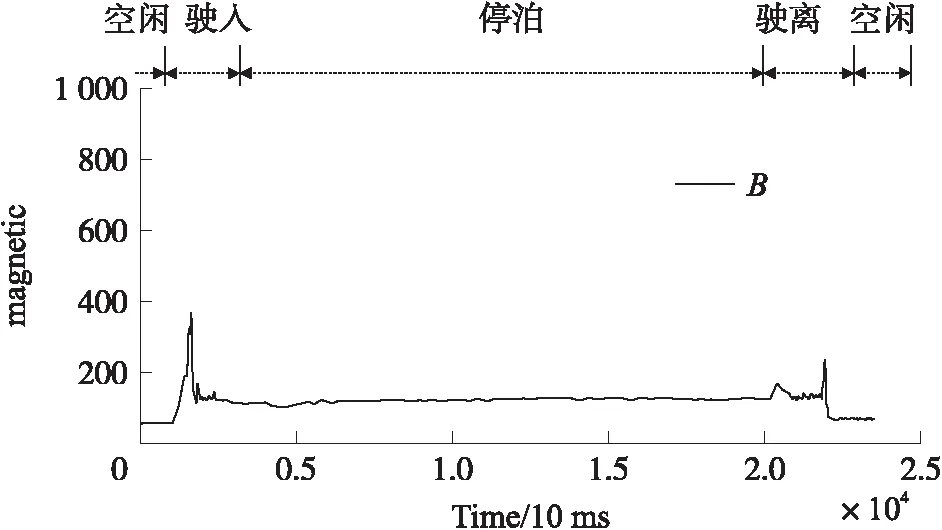
图3 弱磁车辆停泊信号
通过实验得到大量的样本数据,观察相邻传感器磁信号的相关性,场景描述如图1所示,强磁车辆停泊A节点上方,A、B、C感知到的磁信号分别标识为VA、NB、NC,它们具有如下特征:①VA、NB、NC的时间域一致;②VA与NB、VA与NC的波形相似;③VA的波动幅度远大于NB与NC。
1.2 相似度计算
将磁信号建模为时间序列[23-24],分段线性表示PLR(Piecewise Linear Representation)为:
S={(g1,g2,t2),…,(gi-1,gi,ti),…,(gn-1,gn,tn)}
(5)
式中:gi-1,gi(i=2,3,…,n)分别表示第i段直线起始值和终点值,ti表示第i段直线结束的时刻,n表示时间序列S划分直线段的数目。根据PLR模型计算各段的斜率ki,确定各段的模式。
ki=(gi-gi-1)/(ti-ti-1)
(6)
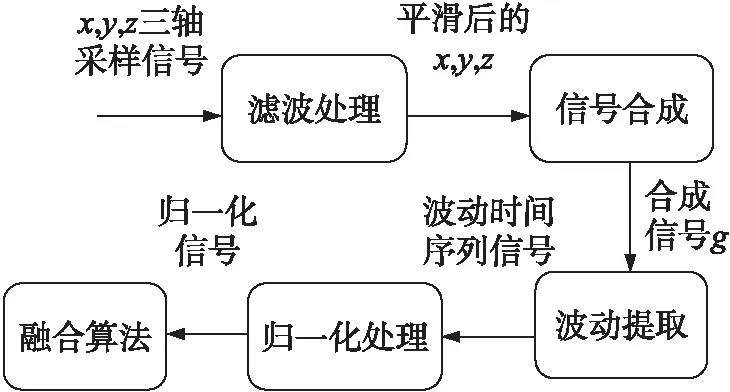
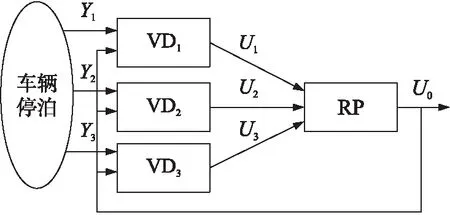
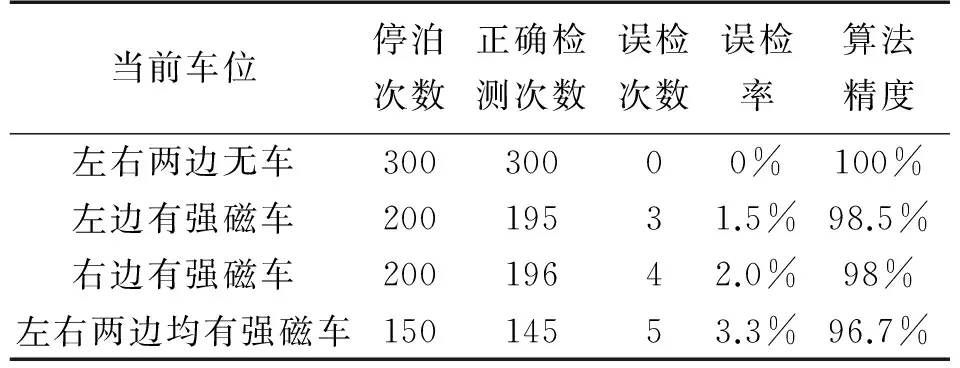
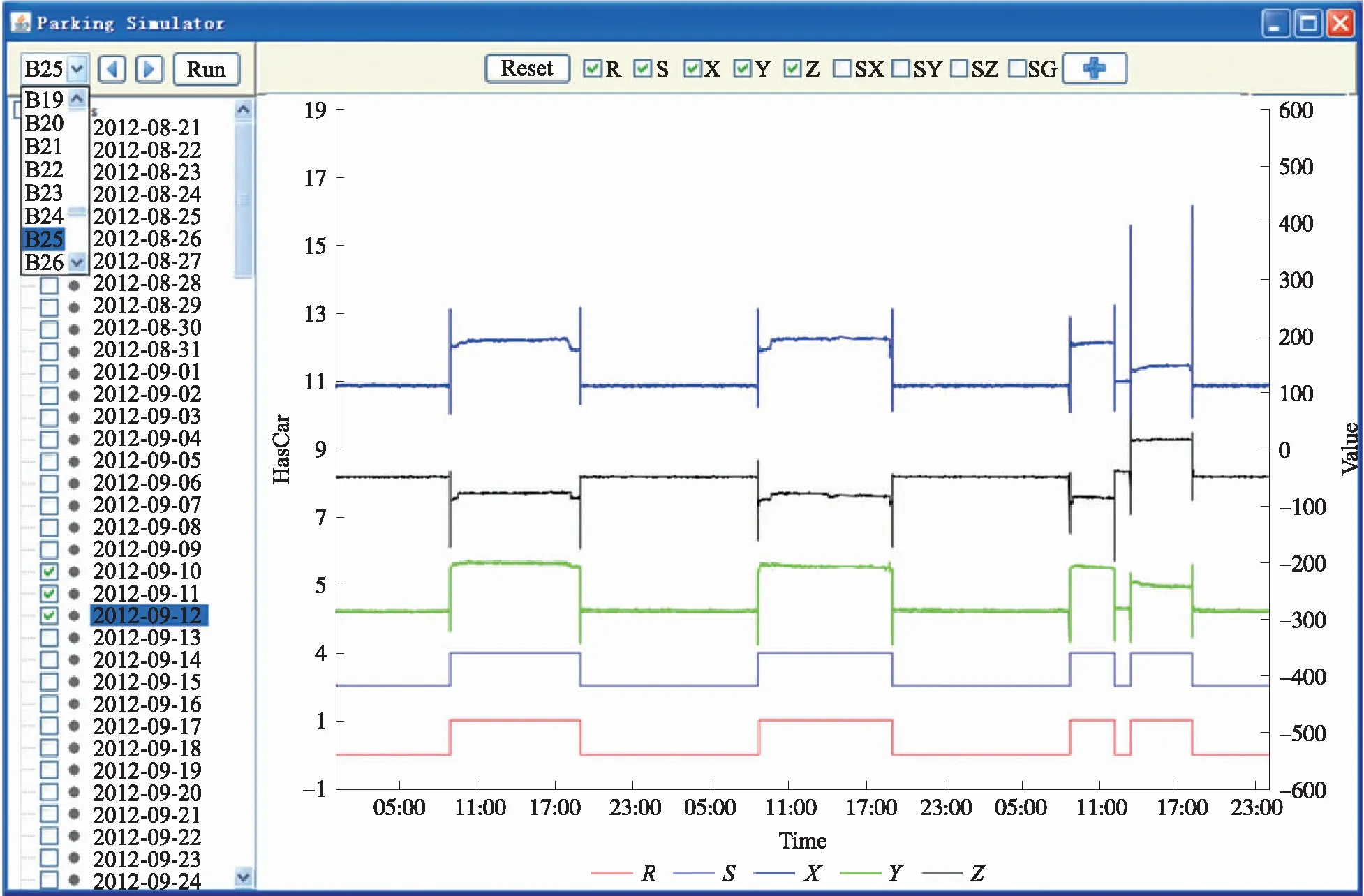
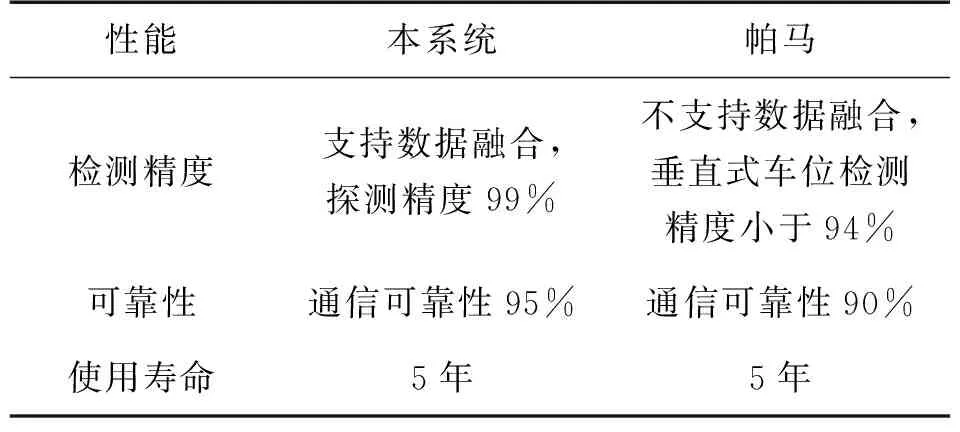
将模式表示为七元集合{快速下降,平稳下降,水平,平稳上升,快速上升},对应表示为M={-2,-1,0,1,2},如表1所示,模式划分的阈值标记为h1,h2,h1 表1 模式划分 将S变换为斜率和模式表现形式如下: S={(k1,m1,t2),…,(ki-1,mi-1,ti),…,(kn-1,mn-1,tn)} (7) 定义S′与S″表示两个等长的,以斜率集表示的时间序列: (8) (9) S′与S″的形态距离为: (10) ①非负性:D(p,q)≥0 [D(p,q)=0,当且仅当p=q] ②对称性:D(p,q)=D(q,p) ③自相似:D(p,p)=0 ④三角不等式: D(p,q)≤D(p,z)+D(q,z) (11) 证明设(Kp,Mp),(Kq,Mq),(Kz,Mz)分别表示时间序列p,q,z相应的形态集,则式(11)可表示为 (12) 式中:不等式两端的大小与时间无关,可化简为 |Kp-Kq|×|Mp-Mq|≤|Kp-Kz|×|Mp-Mz|+ (13) 分情况进行讨论,当Kp>Kz,Kq>Kz时,则Mp≥Mz,Mq≥Mz,式(13)可以表示为式 |Kp-Kq|×|Mp-Mq|≤(Kp+Kq-2Kz)×(Mp+Mq-2Mz) (14) |Kp-Kq|≤(Kp+Kq-2Kz)与|Mp-Mq|≤(Mp+Mq-2Mz)均成立,所以式(12)不等式成立。同理,其他两种情况Kp 磁阻传感器采样信号处理流程如图4所示,关于滤波处理,信号合成,波动提取的方法请参考[16]。上述式(10)距离计算方法需要两个序列时间一致才能进行计算,实验采样发现对于同一辆车的磁场干扰,相邻传感器节点采集到的信号参差不齐,在进行距离计算时需要对节点在同一时间段内的信号作归一化处理。 图4 信号处理流程 将车辆驶入或驶离停车位所引发的磁信号波动数据都归一化为固定长度为N的时间序列,并使用该分段的平均值代替原始的采样值,假定第i次波动的开始时间为tstart(i),结束时间为tend(i) T(i)=[tstart(i),tend(i)] (15) 首先将时间分为N段 (16) tN(i)={t0(i),t1(i),…,tN(i)} (17) wheret0(i)=tstart(i),tj(i)=t(j-1)(i)+ΔtN(i)∀j:1≤j≤N 求每一段时间的信号值,在t时刻的信号合成值为g(t),gj(i)为该落入该段内信号的均值 gN(i)={g0(i),g1(i),…,gN(i)} (18) wheregj(i)=avg[g(t)∀t:t(j-1)(i)≤t≤tj(i)] 车辆检测无线磁阻传感器网络包含三类节点:车辆检测节点VD(Vehicle Detection),路由节点RP(Router Point),网关节点AP(Access Point)。VD部署在停车位上,电池供电,能量极度受限。RP与AP是太阳能供电,可以获得稳定能源。系统管理员将VD的相邻关系发送到RP,由RP实现数据融合计算[26]。为了减少VD的能量消耗,应尽可能地将数据在本地进行计算,已有的研究成果表明,VD可以在本地实现对强磁信号和中磁信号车辆泊车的精确检测[16];若VD检测到强磁或中磁信号,则判决本车位有车辆泊车。若VD检测到弱磁信号,则无法单独判决,将获取的波动信号归一化处理后传输至RP,由RP根据相邻节点数据进行协同判决,如图5所示。 图5 数据融合示意图 RP计算同一时间段内相邻节点信号波动的相似性,如图5所示,假定节点VD2的邻居为VD1和VD3,VD2的第i次波动的开始时间为tstart(i),结束时间为tend(i),数据融合的步骤如下所示: Step 1 对时间段进行扩展Tex(i)=[tex_start(i),tex_end(i)],其中tex_start(i)=tstart(i)-textension,tex_end(i)=tend(i)-textension; Step 2 VD2的相邻传感器VD1和VD3在Tex(i)时间段内没有出现了同步的波动序列,则判定VD2为弱磁车辆停泊,否则执行第3步,所谓同步的波动序列是指VD1或VD3波动的持续时间在Tex(i)的范围内; Step 3 如果VD1与VD2在Tex(i)内出现了同步的波动序列U1、U2,如式(19)计算Sim,其中H为相似度阈值,K1与K2分别为U1与U2的斜率集,如果Sim=1,则判定VD2无车停泊,VD2检测到的信号为相邻停车位VD1的干扰信号;如果Sim=0,判定VD2为弱磁车辆停泊; (19) Step 4 如果VD3与VD2出现了同步的波动序列,则判别方法与Step 3类似; Step 5 返回判决结果给VD2。 常见的车位布局[20]有平行式、斜列式和垂直式3种。平行式停车是指停车位平行于行车道的排列方式,相邻车位磁信号干扰较少,但动态行驶车辆磁干扰较大。斜列式停车是指停车位与行车道呈一定的角度排列,常见的有30°、45°和60°,磁信号容易受相邻车位干扰。垂直式停车是指车位垂直于行车道排列,磁信号容易受相邻车位干扰。 为了测试本文的车辆检测算法,我们在垂直式停车位实地部署了50个传感器节点。传感器节点采用STM8L151C8 MCU,具有LoRa SX1278]通讯模块,集成HMC5883L磁传感器,5 000 mAH锂电池供电,生命周期大于5年。设计开发了客户端系统,如图6所示,通过客户端图形界面用户可以知道停车位是空闲还是占用状态,可以看到每个停车位的占用时长。如图6所示,白色方框表示停车位,小圆点表示节点。路由节点部署在道路旁的路灯上。传感器节点部署在停车位中。小圆点为红色表示车位占用,绿色表示车位空闲。蓝色连线表示网络拓扑结构。停车位的空闲信息发送到路边的诱导屏幕上,用户通过诱导屏幕可以得知是否还有空闲车位。 图6 客户端系统界面 实验参数取值如表2所示。该实验系统实地部署后,持续运行超过5个月。本文的车辆检测算法简称为TSSA(Time Series Similarity Algorithm)。表3为统计的车辆检测算法的平均精度为99%,在总共9 665次测试中,误检次数为97次。 表2 实验参数 对算法的检测效果做进一步细分,我们分别针对强磁车辆干扰在不同场景下做了测试,结果如表4所示。并且在测试中租用了特种车型,如图7所示,测试车辆是比亚迪电动汽车和体积较大的金杯面包车,该两种类型车辆均属于强磁车辆。当车位左右两边均无车辆停泊时检测精度最高,左右有一边有强磁车辆停泊时检测精度次之,左右两边都有强磁车辆停泊时,此时当前车位传感器容易受到左右两边车辆的干扰,检测精度最低。当左右两侧在同一时间段内都有强磁车辆停泊时,当前车位感知到的磁信号是两者干扰信号的叠加,与左右两边传感器的信号都不相似,容易误检。 表4 各类场景干扰测试结果 图7 垂直式停车位测试 图8 实验数据仿真系统 也做了大量的实验与其他算法的性能进行对比,使用实验取得的原始磁场信号,将本文的算法与对比算法分别在PC端仿真运行。在部署的实验系统中,探测节点将采集的磁信号数据打包上传至基站,存储在数据库中,用于对其他算法进行对比仿真验证。我们使用C语言实现车辆检测算法,用JAVA实现仿真系统界面,如图8所示,该系统可以从下拉框中选择对应的停车位节点编号,然后选择需要仿真的数据日期。运行后,可选择显示x、y、z原始地磁信号,同时显示仿真结果及节点运算结果。该系统可支持单节点算法仿真,也可以支持节点协同处理仿真。 与其他算法对比实验结果如表5所示。最大-最小值算法[15]基于波形的特征统计,检测精度为95%,其判据简单,需要设置特定阈值,算法检测精度较低。自适应阈值算法[14]对车辆的检测成功率为94%,对强磁车辆都能成功检测,但其抗干扰性差,检测不到弱磁信号车辆;本文所述算法TSSA计算量相对较小,检测精度优于上述两种算法。在如图9和10所示的场景下,如表5中所示的前两种算法均会出现误判,TSSA算法利用相邻传感器数据融合,具有分辨相邻停车位干扰的能力,提高了车辆检测精度。 表5 算法性能比较 图9 相邻车位干扰信号 图10 干扰信号与本车位车辆停泊信号叠加 图11 平行式停车位测试 为了测试算法对不同场景的适用性,在平行式布局的停车位也做了测试,如图11所示。平行式停车位由于相邻车位之间间距较远,通常是6~7 m,不存在相邻干扰现象,主要是受到旁边道路上通行车辆的干扰,该类干扰会产生一个持续时间很短的脉冲信号。如图12所示为一辆SMV车辆从平行式停车位旁边通过时采样的磁场数据,其特征是道路上通过车产生的干扰是一个短时间的脉冲干扰,不会形成稳定的漂移。车辆停泊后,如图13所示,形成的稳定干扰abs(Drift)>T1(实验中,T1=45)是判断车辆停泊的必要条件之一。所以道路驶过的车辆不会对停车带来误判。 图12 附近驶过车辆对传感器的干扰 使用数据融合会带来延时,已有的研究成果表明,VD可以在本地实现对强磁信号和中磁信号车辆泊车的精确检测[15];若VD检测到强磁或中磁信号,则判决本车位有车辆泊车。信息将直接发送到服务器。若VD检测到弱磁信号,则无法单独判决,需要发送到RP进行数据融合,延时主要包括:VD本地数据归一化计算时间+RP等待邻居VD上报数据的时间+RP融合计算的时间,计算的时间可以忽略,对RP等待时间设定一个上限,当RP收到第1个VD上传的数据后,开启等待计时器Timer=5 s,如果在该段时间内都没有收到邻居VD的磁场数据,则认为邻居VD没有车辆停泊,直接判断本车位为WMV车辆停泊。这种延时对路边停车检测系统的实际使用没有影响,因为该类系统对停车检测允许一定的时延。 目前市场上已经有实际应用的磁感应停车检测系统,东莞帕马停车服务有限公司和浙江创泰科技有限公司是该类系统的主要提供商。本文的停车检测系统是由课题组与深圳市凯达尔科技公司合作研发,已经与东莞帕马停车服务有限公司的系统(简称:)进行过对比。如表6所示,由于本系统采用了数据融合算法,所以检测精度比帕马要好。另外本系统传感器节点采用了LoRa通信模块,通信上比帕马更可靠性。 表6 系统性能比较 在基于磁阻传感器的停车位车辆检测系统中,磁信号容易受到相邻车位车辆停泊干扰,在低信噪比情况下,传感器节点无法分辨干扰信号与当前车位泊车信号。本文基于时间序列相似性度量方法,设计了车辆检测磁场信号融合算法,实验证明该算法比已有算法具有更好的检测精度。但是本算法存在以下不足,传感器旁边车位同时各有一辆SMV进入,那么传感器处的磁场为叠加信号,所形成的干扰信号可能与相邻节点的信号都不相似,本算法无法进行分辨,需要从其他的特征进行分析,这是本文下一步工作。 [1] Chakraborty S,Nandi S,Karmakar S. ADCROSS:Adaptive Data Collection from Road Surveilling Sensors[J]. IEEE Trans Intelligent Transportation System,2014,15(5):2049-2062. [2] 王玮,沈继忠,董利达. 自供电磁阻车辆检测节点设计[J]. 传感技术学报,2013,26(12):1734-1739. [3] 孙荣丽,王睿,崔莉. 交通无线传感器网络研究进展[J]. 计算机研究与发展,2011,48(Suppl):360-366. [4] Gontarz S,Szulim P,Seńko J,et al. Use of Magnetic Monitoring of Vehicles for Proactive Strategy Development[J]. Transportation Research Part C:Emerging Technologies,2015,52(part c):102-115. [5] Yiu S,Coleri S,Dundar B,et al. Traffic Measurement and Vehicle Classification with a Single Magnetic Sensor[R]. California Partners for Advanced Transit and Highways(PATH). Working Papers:UCB-ITS-PWP-2004-7,2004. [6] Cheung S Y,Varaiya P. Traffic Surveillance by Wireless Sensor Networks:Final report[R]. Technical Report,California PATH,University of California,Berkeley,CA 94720,2007. [7] Taghvaeeyan S,Rajamani R. The Development of Vehicle Position Estimation Algorithms Based on the Use of AMR Sensors[J]. IEEE Trans Intelligent Transportation Systems,2012,13(4):1845-1854. [8] Taghvaeeyan S,Rajamani R. Portable Roadside Sensors for Vehicle Counting,Classification,and Speed Measurement[J]. IEEE Trans Intelligent Transportation Systems,2014,15(1):73-83. [9] Wang R,Zhang L,Sun R,et al. EasiTia:A Pervasive Traffic Information Acquisition System based on Wireless Sensor Networks[J]. IEEE Trans Intelligent Transportation Systems,2011,12(2):615-621. [10] Zhang L,Wang R,Cui L. Real-Time Traffic Monitoring with Magnetic Sensor Networks[J]. Journal of Information Science and Engineering,2011,27(3):1473-1486. [11] Wahlström N,Hostettler R,Gustafsson F,et al. Classification of Driving Direction in Traffic Surveillance Using Magnetometers[J]. IEEE Trans Intelligent Transportation Systems,2014,15(4):1405-1418. [12] 王玮,沈继忠,董利达. 一种低功耗双磁阻节点互补车辆检测方法[J]. 传感技术学报,2014,27(6):763-769. [13] Jeffrey J,Gajanan R,Kumar S,et al. Smart Parking System Using Wireless Sensor Networks[C]//The Sixth International Conference on Sensor Technologies and Applications,2012:306-311. [14] Ding J,Cheung S Y. Signal Processing of Sensor Node Data for Vehicle Detection[C]//The 7th International IEEE Conference on Intelligent Transportation Systems,2004:70-75. [15] Gu J,Zhang Z,Yu F. Design and Implementation of A Street Parking System Using Wireless Sensor Networks[C]//IEEE International Conference on Industrial Informatics,2012:1212-1217. [16] Zhang Z,Tao M,Yuan H. A Parking Occupancy Detection Algorithm based on AMR Sensor[J]. IEEE Sensor Journal,2015,15(2):1261-1269. [17] Zhu J,Cao H,Shen J,et al. Data Fusion for Magnetic Sensor Based on Fuzzy Logic Theory[C]//International Conference on Intelligent Computation Technology and Automation,2011:87-92. [18] Klir G J,Yuan B. Fuzzy Sets and Fuzzy Logic[M]. New Jersey:Prentice Hall,1995:1-25. [19] Zhu H,Yu F. A Vehicle Parking Detection Method Based on Correlation of Magnetic Signals[J]. International Journal of Distributed Sensor Networks,2015,10(5):89-104. [20] 关向科. 基于无线磁阻传感器网络的车辆检测技术研究[D]. 南京:南京邮电大学,2014. [21] Honeywell. HMC5883L datasheet[EB/OL]. http://www51.honeywell.com/aero/common/documents/myaerospacecatalog-documents/Defense_Brochures-documents/HMC5883L_3-Axis_Digital_Compass_IC.pdf. [22] Zhang Z,Li X,Yuan H,et al. A Street Parking System Using Wireless Sensor Networks[J]. International Journal of Distributed Sensor Networks,2013,2013(7):155-165. [23] 董晓莉,顾成奎,王正欧. 基于形态的时间序列相似性度量研究[J]. 电子与信息学报,2007,29(5):1228-1231. [24] 张建业,潘泉,张鹏,等. 基于斜率表示的时间序列相似性度量方法[J]. 模式识别与人工智能,2007,20(2):271-274. [25] Zhu H,Yu F. A Cross-Correlation Technique for Vehicle Detections in Wireless Magnetic Sensor Network[J]. IEEE Sensors Journal,2016,16(11):4484-4494. [26] 余修武,范飞生,周利兴. 无线传感器网络自适应预测加权数据融合算法[J]. 传感技术学报,2017,30(5):772-776.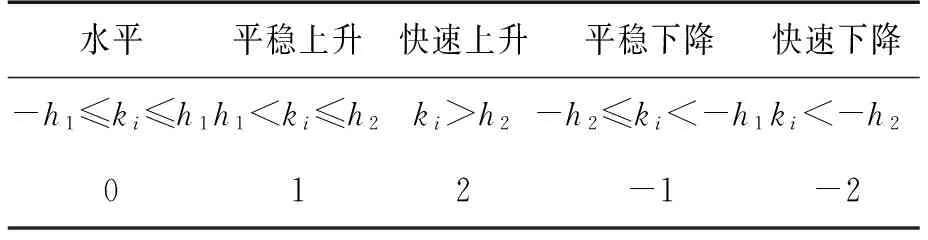



|Kq-Kz|×|Mq-Mz|2 磁信号融合算法
2.1 信号归一化处理
2.2 数据融合
3 实验






5 结论
猜你喜欢
飞碟探索(2021年4期)2021-12-17防爆电机(2021年4期)2021-07-28英语文摘(2020年7期)2020-09-21石材(2020年6期)2020-08-24矿业工程(2020年6期)2020-02-02数学小灵通(1-2年级)(2019年5期)2019-05-21自然资源情报(2018年7期)2018-12-28中国自行车(2018年11期)2018-12-03电子制作(2018年19期)2018-11-14遵义(2018年13期)2018-08-08
