
基于信道状态信息的人体行为识别方法
2018-04-09 08:09蒋思琪王向勇
通信电源技术 2018年1期
蒋思琪,王向勇
(江苏省邮电规划设计院有限责任公司,江苏 南京 210019)
0 引 言
随着21世纪科学技术的飞速发展和计算机设备的普及,人体行为识别已经成为众多国家重点关注和研究的对象,其对改善人类的生产生活有着巨大的意义。所谓人体行为识别,是指对观测对象(主要是人)的动作类型和行为模式进行认知与识别,其数据来源通常是图像、可穿戴的传感器设备、视频信号、无线信号等。人体行为识别是一门涉及多学科、跨越多领域的研究内容,它包括模式识别、计算机视觉、人工智能、机器学习、传感器技术等。它的应用领域主要包括智能家居、体感游戏、个性化应用、人体姿态监护等。传统的基于视觉的行为识别技术易受光线、视距传播等因素的影响,而基于传感器的行为识别需要使用者佩戴专用设备,影响了行为识别技术的推广。WLAN环境下基于CSI的人体行为识别技术以其成本低、隐蔽性好、环境适应性强等优势,近年来受到广泛的关注。本文研究WLAN环境下基于CSI的人体行为识别方法。该方法首先对人体行为的CSI信号进行分析,然后利用滑窗提取CSI信号特征,利用核密度估计方法求出检测门限,最后利用DTW算法进行人体行为识别。根据真实环境数据验证表明,本文提出的基于CSI的人体行为识别方法识别率高,系统鲁棒性强。
1 CSI信号分析
如图1所示的环境,环境中包括静态反射物(墙)和动态反射物(人),接收端解算出来的CSI数据应该是多条路径信号的叠加,可表示为:
H(fj,t)=|H(fj,t)|×arg(H(fj,t))
(1)
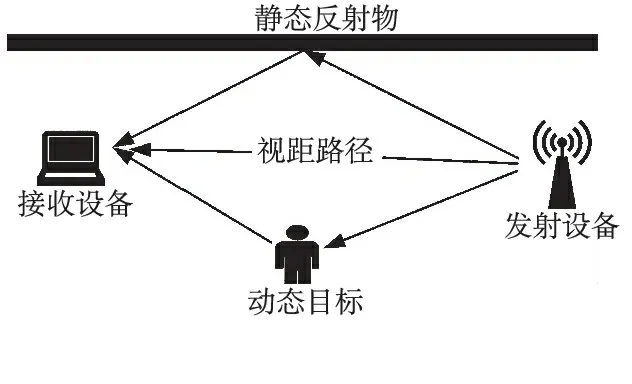
图1 CSI信号传播环境
图2为人对CSI链路进行干扰前后,CSI信号幅值的变化情况。从图中可以看出,在无人干扰时,CSI的幅值|H(fj,t)|处于一个相对平稳的状态;当人对链路进行干扰时,|H(fj,t)|的抖动要明显强于静默阶段,通过提取|H(fj,t)|的抖动特性,可以判断当前时刻目标是否有目标(行为)。
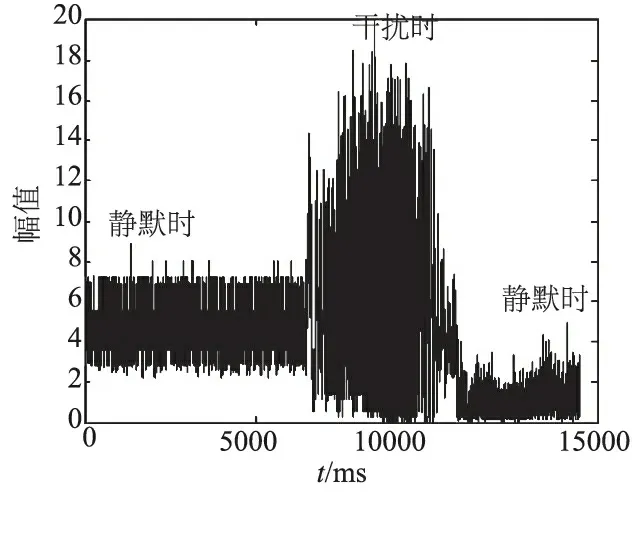
图2 人干扰链路前后CSI幅值的变化
2 滑窗提取CSI信号特征
通过上节的分析可知,信号的抖动性能够衡量当前时刻是否有目标(行为)。基于此,本文将通过CSI幅值|H(fj,t)|的变化进行分析用以判断当前链路中是否有目标(行为)。为此首先需要提取CSI信号流中蕴含的可以表征抖动性的信息,实现信号特征的提取。
信号流是指接收端在一段时间内采集到的按照时间顺序排列的|H(fj,t)|数据序列。它的特点是数据量很大并且容易受到噪声影响,如果直接对其进行计算,不仅不能保证系统的实时性,而且很容易使行为数据淹没在静默数据中。因此,系统首先需要利用滑动窗口(简称滑窗)技术,对滑窗内数据流的变化情况进行提取,分析短时间内的信号抖动情况。
滑窗是对窗内包含的短时间的CSI数据进行特征提取,滑窗技术及信号提取的示意图如图3所示。
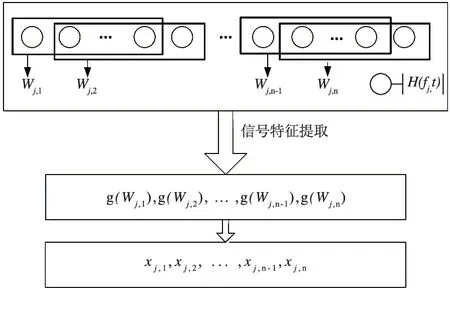
图3 滑窗提取信号特征示意图
如图3所示,对于第j个子载波,假设接收端获取到n+l-1个CSI幅值数据,则需要利用n个长度为l的滑窗对这些样本数据进行处理,每个滑窗Wj,i通过特征提取函数g(Wjn)来计算特征xj,i。
方差是在概率论和统计中衡量随机变量或一组数据离散程度的度量,它可以反映滑窗内信号的抖动性。因此,本文选取滑窗内方差作为刻画信号抖动性的度量标准。其计算公式如下:
(2)
(3)
3 核密度估计
要进行行为提取,首先需要区分静默状态和行为状态。通过前面的分析可知,行为状态下CSI信号的抖动性要强于静默状态,因此,可以通过核密度估计方法,求出静默状态下的滑窗方差的分布模型,从而求取检测门限,以判决是否有行为。
核密度估计方法是一种非参数统计的方法,它是根据待估样本的自身属性来确定其分布的情况,相比于参数估计法,该方法不需要样本的先验知识和预先对参数进行设置,适合对大量数据进行概率密度估计。
在非参数核密度估计中,CSI接收端接收到n+l-1个信道频率响应值H(f,t)作为样本,利用公式(2)和公式(3)对样本进行信号特征提取,然后利用公式(4)的核密度估计函数对提取出的n个滑窗方差xj,1,xj,2,…,xj,n的概率分布进行估计:
(4)
由式(4)可知,非参核密度估计可以将离散的特征参数的概率密度连续化。在非参数核密度估计中,认为当前观测值的真实值可能是周围的某一个值,且该真实值的概率是由核函数反映的,核密度估计的原理图如图4所示。
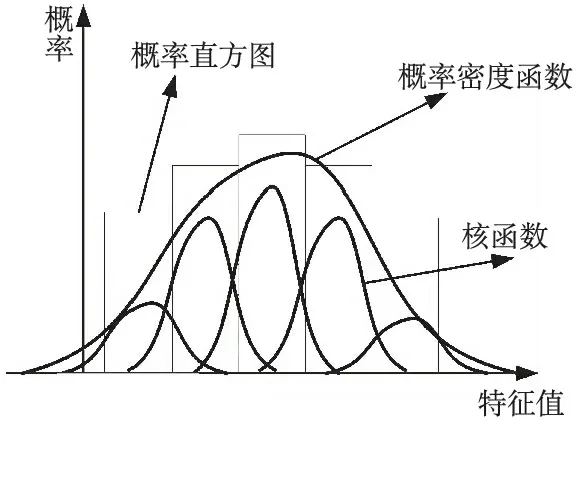
图4 核密度估计原理图
由上面的分析可知,利用核密度估计方法来对样本进行估计,核函数与带宽hj的选择决定着估计出的概率密度曲线是否靠近真实情况。
对于核函数,一般只需满足对称性和归一性,其效果差异不大,本文选取高斯核函数,公式如下:
(5)
(6)

在得到概率密度分布后,其检测门限可设定为Kj,利用公式(7)和公式(8)求取检测门限了。
(7)
kj=F-1(1-α)
(8)
这里Fj(x)表示第j条链路的累积概率分布函数。检测门限kj为其α下分位数,α一般取0.05。最终结合多个子载波的检测门限,求取联合检测门限kopt。
(9)
4 行为提取
在行为提取阶段,CSI幅值|H(fj,t)|的方差δt要不小于检测门限kopt,于是通过检测δt≥kopt的一段数据,即可得到行为阶段对应数据,其过程可由图5描述。
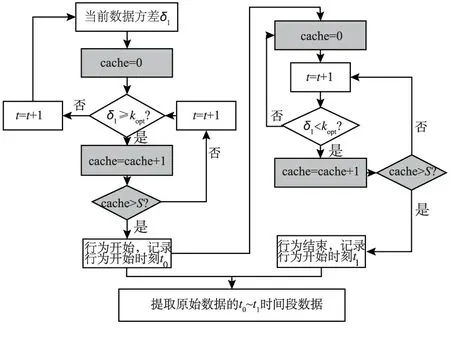
图5 在线行为提取流程图
图中阴影部分是为了防止偶然误差导致行为提前开始或提前结束而设置的缓存带,行为提取的具体步骤描述如下。
步骤1:利用公式(2)和公式(3)计算当前时刻各个子载波的方差,并计算其和,得到联合方差δt;
步骤2:初始化缓存带,即cache=0,并设定缓存带大小S;
步骤3:比较δt与公式(9)计算出的检测门限kopt的大小,若δt≥kopt,cache=cache+1;否则,t=t+1,跳转到步骤1;
步骤4:观察缓存带是否已满,若cache>S,表示缓存带已满,记录当前时刻为开始时刻t0;若cache≤S,表示缓存带未满,cache=cache+1,t=t+1,计算当前时刻的δt,跳转到步骤3;
步骤5:清空缓存带cache=0,t=t+1,计算当前时刻的δt;
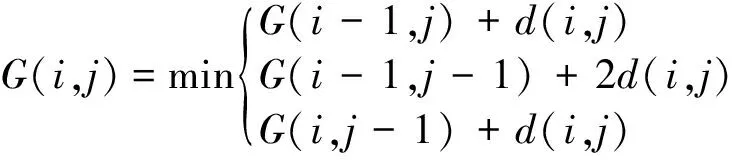
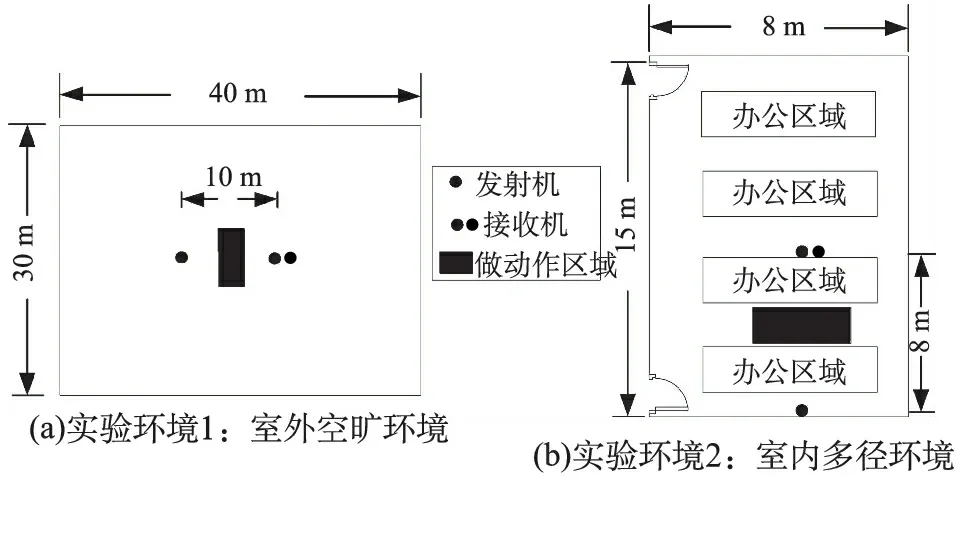
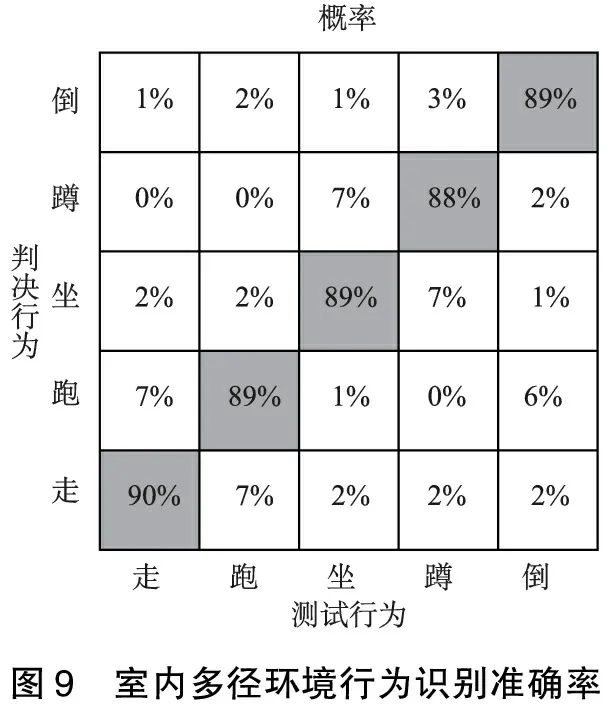
步骤6:比较当前时刻的δt与检测门限kopt的大小,若δt 步骤7:观察缓存带是否已满,若cache>S,表示缓存带已满,记录当前时刻为结束时刻t1;若cache≤S,表示缓存带未满,cache=cache+1,t=t+1,计算当前时刻的δt,跳转到步骤6; 步骤8:提取原数据中的t0~t1时间段的数据。 至此,行为提取就完成了。 由于不同行为的序列长度不一致,导致传统的曼哈顿距离、欧式距离、切比雪夫距离等距离计算方式都无法使用,为此研究者提出使用DTW算法来计算行为特征序列之间的相似度。DTW算法是一种常用于语音识别中来解决发音长短不一导致的语音序列不等长的模板匹配算法,其特点是使用该算法时系统不需要提前对样本序列进行训练。其核心思想是:相同行为的特征序列具有非常相似的形状,但是其形状并不是完全对齐的,所以在计算相似度时需要先将两个序列中的某一个(或者两个)扭曲,以达到更好的对齐。假定Q={q1,q2,…,qi,…,qm},C={c1,c2,…,cj,…,cn}为两种行为的特征序列,利用公式(10)得到匹配度矩阵G。 (10) 式中,d(i,j)表示qi和cj的距离,一般情况下d(i,j)=|qi-cj|;G(i,j)表示序列{q1,q2,…,qi}与序列{c1,c2,…,cj}的匹配度。通过递推,计算得到G(m,n)即为两段序列的匹配度。计算过程的示意图如图6所示。 图6 DTW计算过程 如图6所示,两段特征序列的最终匹配度为2,虚线箭头为其计算过程。 (11) (12) 式中, (13) DTW算法需要结合KNN等算法使用,在在线阶段通过DTW算法来计算特征相似度,完成人体行为的识别。 为了验证本章行为提取算法的有效性,选择两种具有代表性的实验测试环境进行算法的验证和行为提取系统的性能分析。测试环境1选择在面积大小为40 m×30 m的广场,该环境为室外空旷环境,障碍物较少,多径分量也较少,实验中发射机与接收机之间相距10 m。测试环境2选择在面积大小为15 m×8 m的室内办公场所,该环境摆设物较多,环境相对比较复杂,实验中发射机与接收机之间相距8 m。图7分别展示了两种典型实验测试环境的结构图。 图7 两种典型的实验环境平面结构图 本文的实验主要是检测人的各种行为,故在测试时接收机与发射机的离地高度为1.2 m。接收设备与发射设备均为配有intel 5300网卡的ProBox23 MS-B083迷你主机,发射机与接收机均采用单天线结构。 本文采集了日常生活中常见的5种行为:走、跑、坐下、蹲下、倒下,在室外空旷和室内多径两个环境中分别建立行为数据库。以室外环境为例,该数据库中包含了上述5种测试行为,每种行为30组,共计150组行为,每组行为的采集时间长短不一致。测试数据邀请不同的志愿者测试这5种行为,每种动作采集100组,共计500组测试行为,接收数据频率为1 000 Hz,测试行为前后均有一段静止时间。 根据以上诊室采集的数据进行算法验证,对室外空旷环境中测试的{走、跑、坐下、蹲下、倒下}各个行为的识别率如图8所示。 综合所有行为,算得的整体识别准确率为89.8%。 对室内多径环境中测试的{走、跑、坐下、蹲下、倒下}各个行为的识别率如图9所示。 在室内多径环境内,综合所有行为算得的整体识别准确率为89.0%。 综合室外空旷环境和室内多径环境下行为识别准确率可知,本文提出的WLAN环境下基于CSI的人体行为识别方法能够有效识别人体行为,算法鲁棒性高。 图8 室外空旷环境行为识别准确率 图9 室内多径环境行为识别准确率 由于目前人体行为识别技术在智能家居、体感游戏、个性化应用、人体姿态监护等领域的需求越来越大。本文研究了一种WLAN环境下基于信号状态信息的人体行为识别方法。该方法首先对人体行为的CSI信号进行分析,然后利用滑窗提取CSI信号特征,利用核密度估计方法求出检测门限,最后利用动态时间规整算法进行人体行为识别。在真实实验场景下分别采集室外空旷、室内多径环境下走、跑、蹲、坐、倒五种行为的WLAN数据进行验证,实验结果表明本文提出的WLAN环境下基于CSI的人体行为识别方法能够有效识别人体行为,具有较高的算法鲁棒性。 参考文献: [1]Aggarwal J K, Ryoo M S. Human activity analysis: Areview[J]. Acm Computing Surveys, 2011, 43(3): 16. [2]Tahmina Zebin, Patricia J Scully, Krikor B Ozanyan. Human activity recognition with inertial sensors using a deep learning approach[C]. IEEE SENSORS. Orlando: IEEE, 2016. [3]Scott D W. Scott's rule[J]. Wiley Interdisciplinary reviews computational statistics, 2010, 2(4):497-502. [4]谷雨, 权良虎, 陈孟妮,等. 基于WLAN背景噪音的被动式人体行为识别研究[J]. 中国科学技术大学学报, 2015, (4): 308-313.5 基于DTW的人体行为识别算法


6 算法验证与分析
6.1 实验环境
6.2 实验数据采集与处理
6.3 实验结果分析

7 结束语
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
小哥白尼(趣味科学)(2022年1期)2022-04-26
汽车实用技术(2022年4期)2022-03-07
大科技·百科新说(2021年10期)2021-12-31
科技视界(2021年4期)2021-04-13
现代信息科技(2021年17期)2021-04-05
农业机械学报(2021年1期)2021-02-01
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
数字通信世界(2020年2期)2020-03-04
小猕猴学习画刊·下半月(2019年6期)2019-08-13
