
基于车载点云数据构建模型的方法研究
2018-04-04 08:58贾宝张涛李小娟禹旭
资源导刊(信息化测绘) 2018年3期
贾宝 张涛 李小娟 禹旭
(河南省测绘工程院,河南 郑州 450003)
三维建筑模型是“数字城市”的重要组成部分,也是三维GIS应用的重要方向,已在诸如城市规划、文化遗产保护及许多基于位置的服务等领域得到广泛应用。车载LiDAR技术为建筑三维重建提供了可靠的数据源保障,它可以直接获取高密度、高精度的三维空间信息,非常有利于建筑物侧面特征提取,从而为实现自动化的建筑三维模型构建奠定基础[1]。
本文基于车载LiDAR点云数据开展建筑三维模型自动重建方法研究,分析车载建模测量系统原理及彩色点云生成原理与过程,研究车载点云数据构建模型的关键技术,通过实例证明该技术用于三维模型的可行性,为建筑物立面信息采集提供了新的技术手段。
1 车载建模测量系统的工作原理
2 彩色点云生成
2.1 数据融合的基本原理
激光扫描仪所得的点云数据与面阵相机获得的影像数据相融合的目的是,通过通用坐标系下的激光点Q(x,y,z),求出其面阵CCD相机上的像点q(i,j),然后将q的RGB值赋给Q,从而把Q变为有颜色属性的彩色点云,实现激光点云数据与面阵CCD数据的融合[3]。
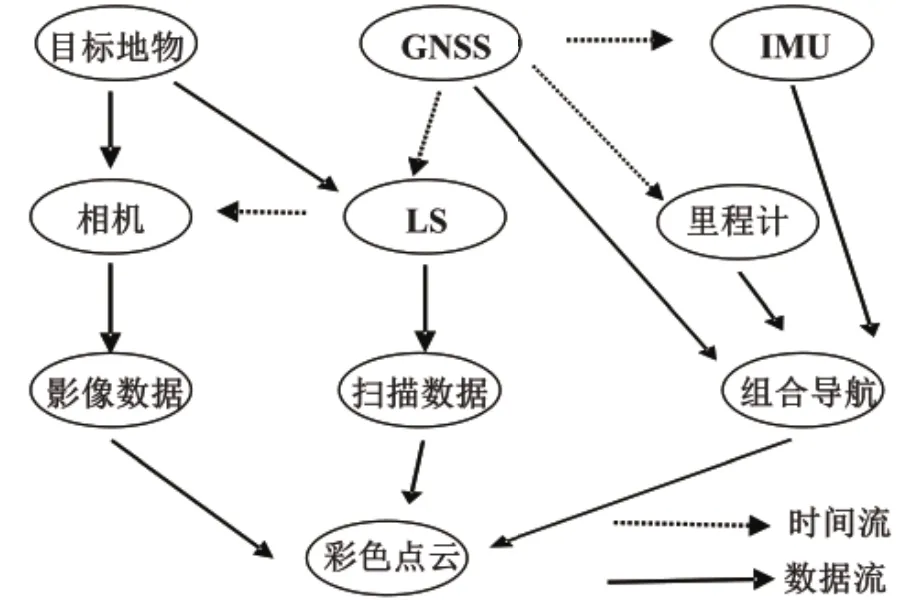
图1 移动测量系统工作流程
2.2 数据融合流 程
数据融合是通过解算组合导航数据与相机相对于IMU中心的外方位元素,相机曝光时通过控制系统发射脉冲,同时通过打标的形式将信号传递给GNSS,从而得到曝光时的GNSS时间,在各个系统时间同步的条件下,最终可得到获取每幅图像时面阵相机的焦点坐标以及图像的像素坐标。然后利用共线方程得到激光点在相对应图像上的像素坐标,最后将对应像素的RGB值赋给点云数据,从而得到彩色点云数据[4]。
3 基于车载点云数据构建模型的关键技术
3.1 模型建立的原理
激光数据处理得到彩色点云数据后,可以经过构建三角网来建立模型。不规则三角网是用一系列互不交叉、互不重叠且连接在一起的三角形来表示地物表面,其有栅格的空间铺盖特征又是矢量结构,可以很好地描述和维护空间关系。可通过不规则分布的数据点生成连续三角面拟合起伏的地物表面[5]。
3.2 模型建立的方法
构建不规则三角网的思路如下(构网示意如图2):

图2 三角网构建示意图
(1)首先进行数据简化,兼顾数据密度和地物局部细节特征,依据下述准则分别简化每条扫描线:①每条扫描线首尾点保留;②若扫描线上一点与前数据点间的距离或与后面相邻点间的距离大于一定的阈值,则保留该点;③对于保留下来的点,若距离最近的两个点其距离小于一定的阈值,则合并这两个点,并取其中间点作为新的点云数据;④重复以上操作,直到没有点可以合并为止。
(2)选择两条相邻的扫描线数据,分别定义为L(i),L(i+1),如果是建模开始则为 L(1),L(2),其中L(i)上有m个扫描点,编号为1,2,3……m,L(i+1)上有n个数据点,编号分别为1,2,3……n。
(3)选择并连接L(i)上相邻的两个数据点P(i,j)与P(i,j+1),得到一条线段。在相邻的扫描线L(i+1)上寻找一点 P(i+1,k)使得 P(i,j),P(i,j+1),P(i+1,k)所构成的三角形边长和最小,并记录下k的值。
此时,可用“最佳反应法”求Nash均衡解[11],即如果投资博弈模型满足Nash均衡的一阶条件(利润函数对自身投资的导数等于0)
(4)选择下一个扫描点P(i,j+1),P(i,j+2)。在L(i+1)上寻找一点,使得其所构成三角形的边长的和最小。在L(i+1)上从k点之后开始寻找,以避免构成的三角网重叠。
(5)检查L(i)上的首尾点是否分别和L(i+1)上的首尾点构成三角形,若是没有构成,则将P(i,1),P(i+1,1),P(i+1,2)构成三角形,在末端使P(i,m),P(i+1,n),P(i+1,n-1)构成三角形。
(6)扫描L(i)扫描线中点[设为P(i,q)]所参与构成的三角形的个数。若个数为2,则检查与之构成三角形在扫描线L(i+1)上的点,设其参与构成的两个三角形在L(i+1)的编号为t,k。如果t点与k点不相邻,即|t-k|>1,则将处于t点与k点之间的点都与点P(i,q)相连接构成三角形。
(7)扫描线L(i),L(i+1)三角网构建完成后,构建扫描线L(i+1),L(i+2)。重复以上步骤。
3.3 点云缺失补洞方法
用构建三角网的方法构建模型时,模型质量完全取决于点云质量。在实际作业中,存在点云数据缺失问题,对此可以采取以下方法来尽量避免。
数据采集过程中,地物的遮挡而造成的点云缺失,可以采用往返扫描或者转扫的方式来获得尽量全的点云数据。部分地区,由于树木等地物离建筑物距离较近,无法通过往返扫描来填补漏洞,此时可以通过点云补洞的方法来弥补点云数据的缺失。
点云补洞的过程中需要用到点云数据中的一些信息,包括点的三维坐标,RGB颜色信息,该点所对应激光扫描线的编号,获取该点时POS的中心点三维坐标,航向、俯仰、横滚角和反射点类别号。
从图3可以看出,只需要将激光束从遮挡物处继续向后延伸到房屋所在平面即可。其算法原理是对每一条扫描线进行计算,激光束的角度不变,距离增加,设定一个值来判断是否延伸到了建筑物。具体步骤是:
(1)读取每条扫描线数据,根据激光扫描头转向的不同,载具一边的扫描数据是从天空到地面进行读取,另外一边与之相反。可根据已分类的点云数据找出建筑物与树木。
(2)若读取的点是建筑物,记录其与POS中心点的水平距离;若是树木,根据统计的平距变化值来计算,使其延伸至建筑物的平距值,得出极坐标值,利用极坐标和POS中心坐标算出其POS坐标系下的值。
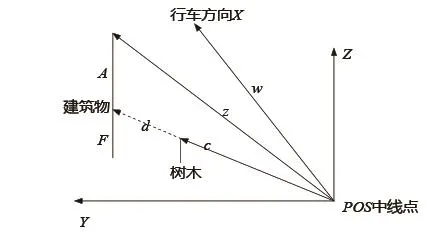
图3 点云数据补洞
3.4 纹理映射
三角网生成后需要进行纹理映射,即将相应的图像贴到所构建三角形表面。
设三角形abc为构建的一个三角形,则在点云数据中,3个顶点a,b,c的空间三维坐标都可以得到。快速建模所用点云数据为经过激光点云数据与相机像片数据融合而获得的彩色点云数据,故还可以知道三角形三个顶点在相对应的像片中的像素坐标。得到三角形顶点a,b,c所对应的像素分别为A,B,C。
在像片中,以像素点A,B,C构成一个三角形,则三角形内的图片即为所构建的三角形的纹理。(如图4)
重复以上步骤,将三角形全部贴上对应的纹理,即可得到基于点云数据的快速模型。
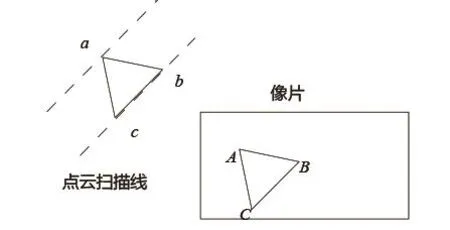
图4 三角网的纹理映射
4 实验分析
4.1 数据获取与处理
本文以长春市经济开发区某区域为例,数据采集当日天气良好,扫描路线上遮挡较少,GNSS信号良好。按照规划线路获取该区域的激光数据、GNSS数据、IMU数据、里程计数据和影像数据,然后对该区域外业采集的所有数据进行数据预处理、点云数据融合、坐标系转换、模型建立等,最终得到具有位置和姿态信息的黑白点云数据。黑白点云数据与同时获取的影像数据融合,得到彩色点云数据,能够实现所测场景的真彩色三维可视化,提高数据采集的速度。
4.2 模型的建立
全自动模型主要应用于模型的快速建立,原理为基于点云数据构建三角网来建立,模型缺乏相应细节,在点云缺失处会出现空洞。可在少量人工干涉下进行建筑物点云补洞,来获得较完整的建筑物点云数据,从而进行模型建立。图5所示为测区一栋建筑物黑白点云,通过激光扫描线构建三角网得到其三维模型,在人工辅助下获取建筑物的精细模型。(如图6)
4.3 与其他建模方法对比分析
现有建模方法主要有依据二维GIS数据建模、航空摄影测量方法建模、机载LiDAR数据建模以及车载激光扫描建模等。针对这几种方法,从技术和经济方面进行比较分析。(如表1)

图5 建筑物黑白点云数据

图6 点云处理过的建筑物模型
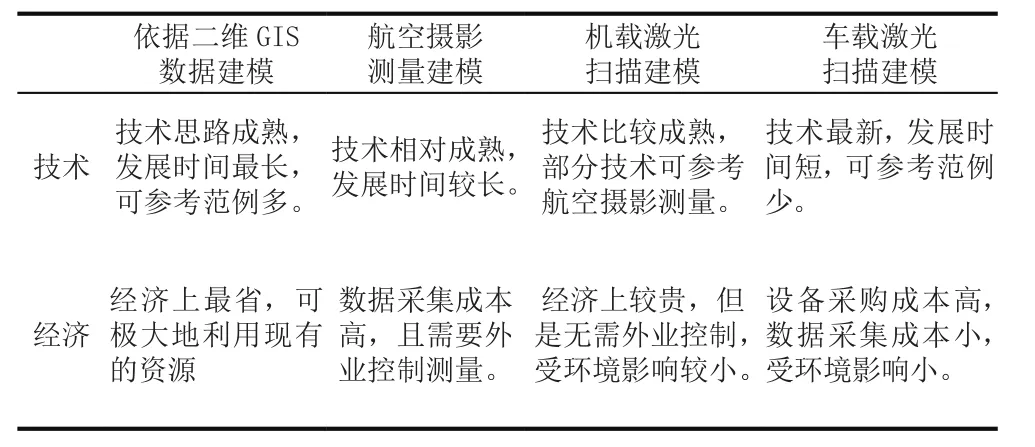
表1 建模方法对比分析
通过对比可知,车载激光扫描技术测量距离长、范围广,数据采集速度快,需要工作人员少,每次大规模作业只要2~3人即可完成,效率高,误差低(厘米级别),相对成本低。
5 结论
实践表明,利用车载LiDAR技术建模,能快速获取城市的三维空间信息和多角度影像信息,能真实反映城市的三维空间布局,克服了传统建模效率低、模型纹理不够丰富真实等缺点;同时,构建的模型要素全面、细节丰富,又具有可量测分析功能。车载激光扫描是近年来兴起的一种三维建模方法,适用于带状地形的数据采集及建筑物立面信息采集,有广阔的发展空间。
[1]向云飞,余代俊,张兵,等.基于LiDAR数据和倾斜摄影的城市三维模型构建[J].测绘工程,2016,25(12):65-69.
[2]沈严,李磊,阮友田.车载激光测绘技术[J].红外与激光工程,2009,38(3):437-440.
[3]李学友.IMU/DGPS辅助航空摄影测量综述[J].测绘科学,2005,30(5):110-113.
[4]王留召.车载激光扫描移动测量系统关键技术研究[D].北京:首都师范大学,2011.
[5]苏蕾.基于车载激光扫描数据的建筑物建模研究[D].焦作:河南理工大学,2012.
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
铁道建筑技术(2021年4期)2021-07-21
黑龙江水利科技(2020年8期)2021-01-21
铁道通信信号(2020年8期)2020-02-06
软件导刊(2020年11期)2020-01-05
小学生学习指导(低年级)(2019年9期)2019-09-25
汽车维修与保养(2019年3期)2019-06-19
智能计算机与应用(2017年2期)2017-05-04
小天使·二年级语数英综合(2015年12期)2015-12-04
汽车零部件(2014年5期)2014-11-11
