
基于单视角点云镜像的猪只体尺测量方法
2018-04-02 05:56:07华明睿朱德海
农业机械学报 2018年3期
王 可 郭 浩 马 钦 苏 伟 华明睿 朱德海
(1.中国农业大学信息与电气工程学院, 北京 100083;2.中国农业大学农业部农业信息获取技术重点实验室, 北京 100083)
0 引言
作为家畜表型的重要组成部分,家畜的体尺是评价其生长的重要参数,也是选种育种方面的重要指标[1-2]。在背标厚、眼肌面积等表型参数检测已经相对成熟的情况下[3-4],体尺参数准确获取已经成为制约表型分析发展的瓶颈,因此如何快速、准确地测量家畜的体尺具有重要研究意义。
传统的家畜体尺测量方式主要由人工操作,但该方法具有工作量大,测量结果不客观,对家畜应激大等缺点。近年来,许多学者投入到基于计算机视觉技术的家畜体尺测量研究中,在奶牛体尺测量方面,郭浩等[5-6]利用Xtion深度相机采集了奶牛的点云图像,并交互式测量奶牛的体尺,验证了Xtion深度相机在奶牛体尺测量上应用的可行性。SALAU等[7]和SONG等[8]利用基于飞行时间法(Time of flight, TOF)原理的深度摄像机系统采集奶牛背部的深度数据,利用图像处理技术研究了提取奶牛体尺的可行性。KAWASUE等[9]和MARINELLO等[10]利用3个Kinect摄像头建立离线标定系统,获取全轮廓奶牛点云信息,对奶牛体高、胸围等体尺指标进行了测量。为了评估奶牛体况,SALAU等[11]设计了一种基于Kinect深度相机的体尺测量平台,对自动提取体尺的可行性进行了研究;在猪体尺测量方面,刘同海等[12]利用CCD相机采集猪体背部及该区域背景的图像,利用图像处理技术,对猪体尺测点的提取进行了研究。李卓等[13]设计了一套基于双目视觉原理的猪体尺检测系统,获取猪体的深度图像,对猪体长、体高等体尺指标进行了测量。刘同海等[14]利用激光三维扫描仪,获取了猪体点云数据和三维曲面模型,提取了猪体的体长、体宽、臀宽、体高、臀高、胸围、体表面积、体积等体尺参数。
目前采用的体尺测量方法都需要搭建固定设施,然后将家畜诱导到视场内获取图像或者点云数据,进而测量体尺,无法满足便携式测量的需要;另外,上述方法在家畜的一侧被遮挡时,体宽、臀宽、胸围,腹围等主要体尺无法获取。为此,本文在实验室前期利用双摄像头采集猪体三维信息工作的基础上[15-17],降低设备成本,在一侧存在遮挡的情况下,采用单深度摄像头,利用另一侧猪体点云信息,通过对称面镜像,也可以得到完整猪体点云,用于提取猪只主要体尺,另外,该系统也满足便携式测量的需要。为验证系统的可行性和精度,选取Xtion PRO 作为点云数据采集设备,并以猪只作为测量对象,采用人工测量的体尺与交互式体尺测量结果进行对比试验。
1 材料与方法
本系统分为2部分,分别为场景点云采集系统和体尺测量系统。场景点云采集系统由计算机、铝制支撑杆和1个深度相机组成。试验选取华硕制造的深度相机,其型号为Xtion PRO LIVE,量程为0.8~3.5 m,采集距离2 m条件下,其X、Y方向精度为3.4 mm、Z方向精度为12 mm,深度图像分辨率为640像素×480像素。Xtion PRO LIVE是一种基于结构光技术的传感器,其光学相关设备主要由3部分构成:1个红外线发射器,1个红外摄像头,1个RGB摄像头。该传感器通过红外相关设备,获取深度信息[18],其深度图像获取方法的核心是光编码技术[19-20]。Xtion固定在铝杆上,便于操作人员调整其角度和方向。便携式计算机利用USB线与Xtion相连,为其供电,并实时记录和处理获取的场景点云,该笔记本配有GTX580M显卡、16 GB内存和Intel i7处理器。场景点云采集系统如图1所示。
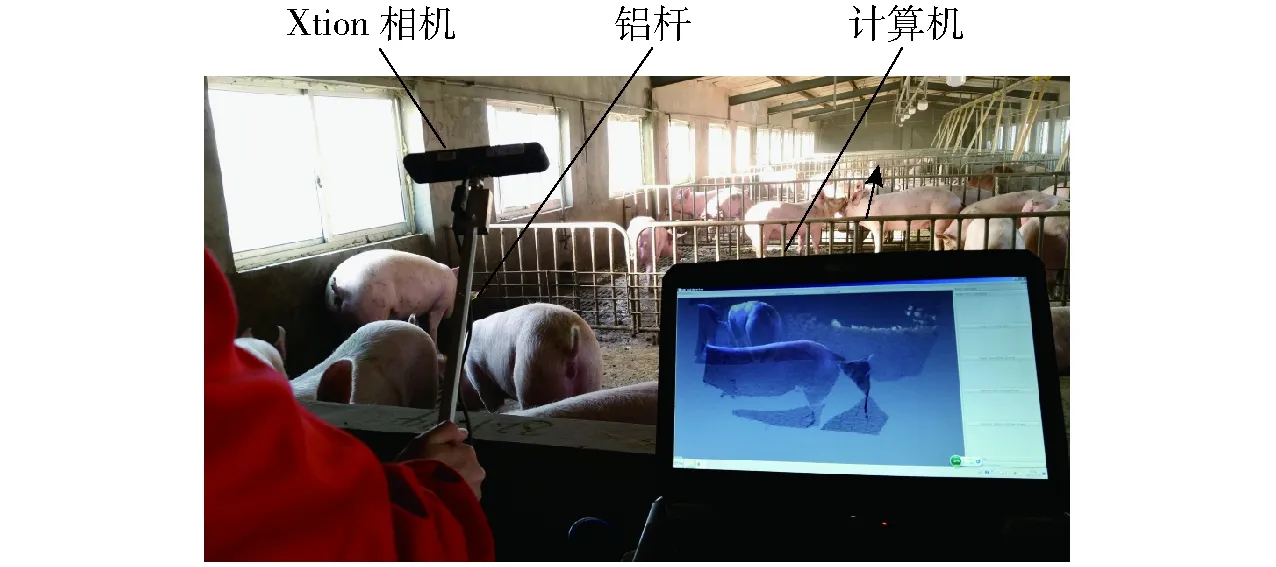
图1 点云采集系统Fig.1 Picture of point clouds acquisition system
利用采集系统获取场景点云序列后,手动选取背部相对笔直的猪体作为输入,依次进行猪体点云自动化分割,旋转归一化,对称面检测,完整猪体点云获取和交互式体尺测量。
1.1 猪体点云采集
为了保证后续算法能够顺利进行,在猪体静止站立条件下,采集人员位于猪体侧面,手持连接Xtion的铝杆,深度相机与猪体背部呈45°角左右采集包含目标猪体的场景点云序列,采集的猪体数据应保证猪体头部和尾部完整,并包含猪体尽量多的背部数据。采集帧速为5~7 f/s,依场景的大小而不同,采集距离应控制在0.8~2 m之间。可以针对单只猪体进行信息采集,也可以在场景内存在多只猪体的情况下,对单只猪体进行信息采集,进而计算体尺信息,但需要保证被测量猪体与其他猪体或者设施不存在接触,否则会影响后续的分割算法,进而影响体尺计算。
猪体为非刚性物体,但其腹部存在大量脂肪,大部分情况下,身体扭动范围较小,此处将背部相对垂直的猪体近似为刚体,检测其近似对称面,进而镜像获取完整猪体,所以在系统采集的点云序列中,手动筛选包含头部和尾部完整、背部弯曲程度较小的猪体的场景点云,进行后续的对称面检测和体尺测量等操作。如图2所示,以一组采集的点云序列为例说明筛选标准,应选取包含背部弯曲较小的猪体的场景点云(图2d)进行后续体尺测量处理。图3a显示了采集的点云序列,图3b为最终选择的场景点云S,本文猪体点云处理流程选取较复杂的场景作为输入,即该点云场景中不仅包含目标猪体,还包括其他猪体。
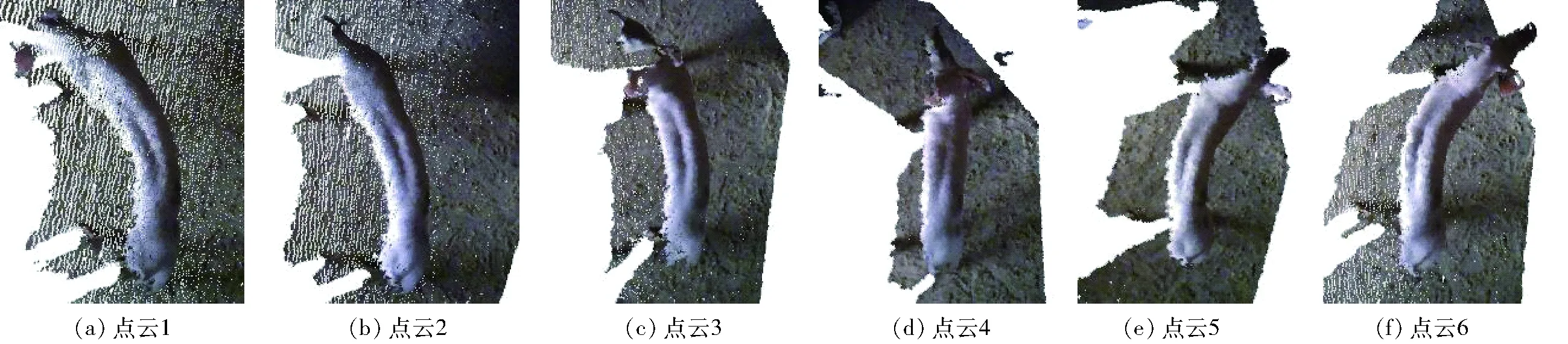
图2 采集的点云序列Fig.2 Acquisitions of point cloud sequence
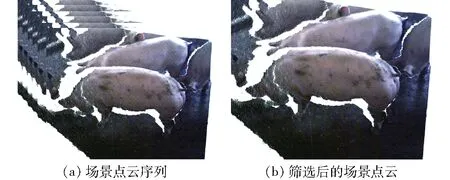
图3 输入点云序列及筛选结果Fig.3 Input point cloud sequence and selection results
1.2 目标猪体点云分割
场景点云S中通常包含目标猪体、地面,还可能包含猪场设施和其他猪体,本文利用随机采样一致性(Random sample consensus, RANSAC)在S中检测地面点云[21],该平面检测方法定义待提取的平面模型为Ax+By+Cz+D=0,然后迭代选择S的随机子集Li,做如下测试:
(1)利用子集Li估计对应的模型参数Ai、Bi、Ci、Di。
(2)计算S-Li中每一个点到估测平面的距离di,将距离di小于λ的点集ni添加到子集Li中,构成新的子集Lni。
(3)利用子集Lni估计新的模型参数Aj、Bj、Cj、Dj。
(4)计算Lni占S的比例ri。
其中Li包含的点数为3,最大迭代次数为N,λ为到平面模型的距离阈值。
直到找到最高比例ri,并记录对应的平面模型和该平面模型对应的内点,此处平面模型内点的定义为在S中与平面模型的距离di小于λ的点的集合,该内点集合Lni即为地面点Pl,同时利用平面模型参数,计算地面点所在平面的法向量np,并存储平面任意点Vpl。
场景点云S删除地面点Pl后,结果如图4a所示,场景余下设施和猪体一般不在空间上相连接,本文使用欧氏距离对场景内余下点云S-Pl进行聚类,为减弱猪场栏杆和设施对后续猪体分割的影响,此处将点云数目大于max或者点云数目小于min的聚类删除,得到的聚类结果记为C={C1,C2,…,CM}。其中,max为聚类可以包含的最大点数,min为聚类至少需要包含的点数。
分割后的聚类结果中包括目标猪体、其他猪体和设施。定义每个聚类Ct到坐标原点的聚类距离为
(1)
式中n——聚类Ct包含点的数量
xi、yi、zi——聚类各点坐标
由于在获取猪体信息时,在所有聚类中,目标猪体聚类到坐标原点的聚类距离dt最小,所以对聚类集合C中每个聚类的dt进行遍历比较,目标猪体Cp是最小dt对应的聚类分割结果,本文获取的点云数据坐标原点位于Xtion红外摄像头中心处,目标猪体的分割结果如图4b所示。

图4 猪体分割过程Fig.4 Pig segmentation process
1.3 姿态归一化
传统体尺测量方法中,体长是耳根中点到尾根点在支撑猪体平面Pg上的距离,体高一般是肩胛骨顶点距离平面Pg的距离,其他的主要线性体尺也均为平面Pg上的距离或者到平面Pg的距离。如图5所示,原有坐标系原点如1.2节所述,位于Xtion红外摄像头中心处,而分割后支撑猪体平面不与原有坐标系下xOy、xOz、yOz任何一个坐标平面平行,直接在原有坐标系下测量体尺,增加了体尺测量的计算量,所以本文将Cp匹配到标准测量坐标系下,再进行后续体尺计算。
参照文献[16],如图5所示,本文的标准测量坐标系定义如下:
(1)标准测量坐标系的原点O定义在猪体点云的重心。
(2)x轴方向沿猪体前后方向,头部朝向为正方向。
(3)y轴方向垂直地面,猪体支撑平面向上为正方向。
(4)z轴方向沿猪体左右方向,x轴、y轴和z轴正方向满足右手定则。

图5 标准测量坐标系Fig.5 Standard measurement coordinate system
参照文献[17]的姿态归一化流程,基于主成分分析(Principal component analysis, PCA)和1.2节的点云分割步骤求得地面法向量np,匹配Cp到本文定义的标准测量坐标系,匹配过程如下:
(1)针对Cp,构建基于地面法向量矫正的PCA坐标系。利用pm为坐标原点,单位向量vl、vh和vw分别为局部坐标系x′、y′、z′ 轴的方向向量,构建基于地面法向量矫正的PCA坐标系C1,其中pm为Cp的重心,vh与猪体分割步骤中提取的地面法向量np相一致,从地面提取的地面法向量存在方向二义性,在本节的后续部分将对其消除。vw的计算公式为
vw=vl1×vh
(2)
其中vl1为对Cp进行PCA主成分分析[21-22]得到的最长轴方向。
vl的计算公式为
vl=vh×vw
(3)
构建的基于地面法向量矫正的PCA坐标系如图6a所示。
(2)旋转平移猪体点云Cp,使其基于地面法向量矫正的PCA坐标系与全局坐标系重合。在C下和C1下分别选取Vl、Vh、Vw和P1、P2、P3作为对应点对进行变换矩阵T的估计,其中P1=(1,0,0),P2=(0,1,0),P3=(0,0,1),Vl=pm+vl,Vh=pm+vh,Vw=pm+vw。
本文采用奇异值分解(Singular value decomposition, SVD)方法计算变换矩阵T,然后利用
Ct=TCp
(4)
实现空间变换,同时利用T对1.2节得到的地面任意点Vpl进行空间变换,得到空间变换后的地面任意点Vpl1。匹配到全局坐标系C后的Ct如图6b所示。
(3)空间变换后,Ct的x、y、z轴与本文定义的标准测量坐标系的x、y、z轴重合,但并不能保证它们方向也完全一致。因此,需要检测它们的坐标轴方向是否一致,如果不一致,需要对Ct进行空间变换,使其符合本文定义的标准测量坐标系要求。
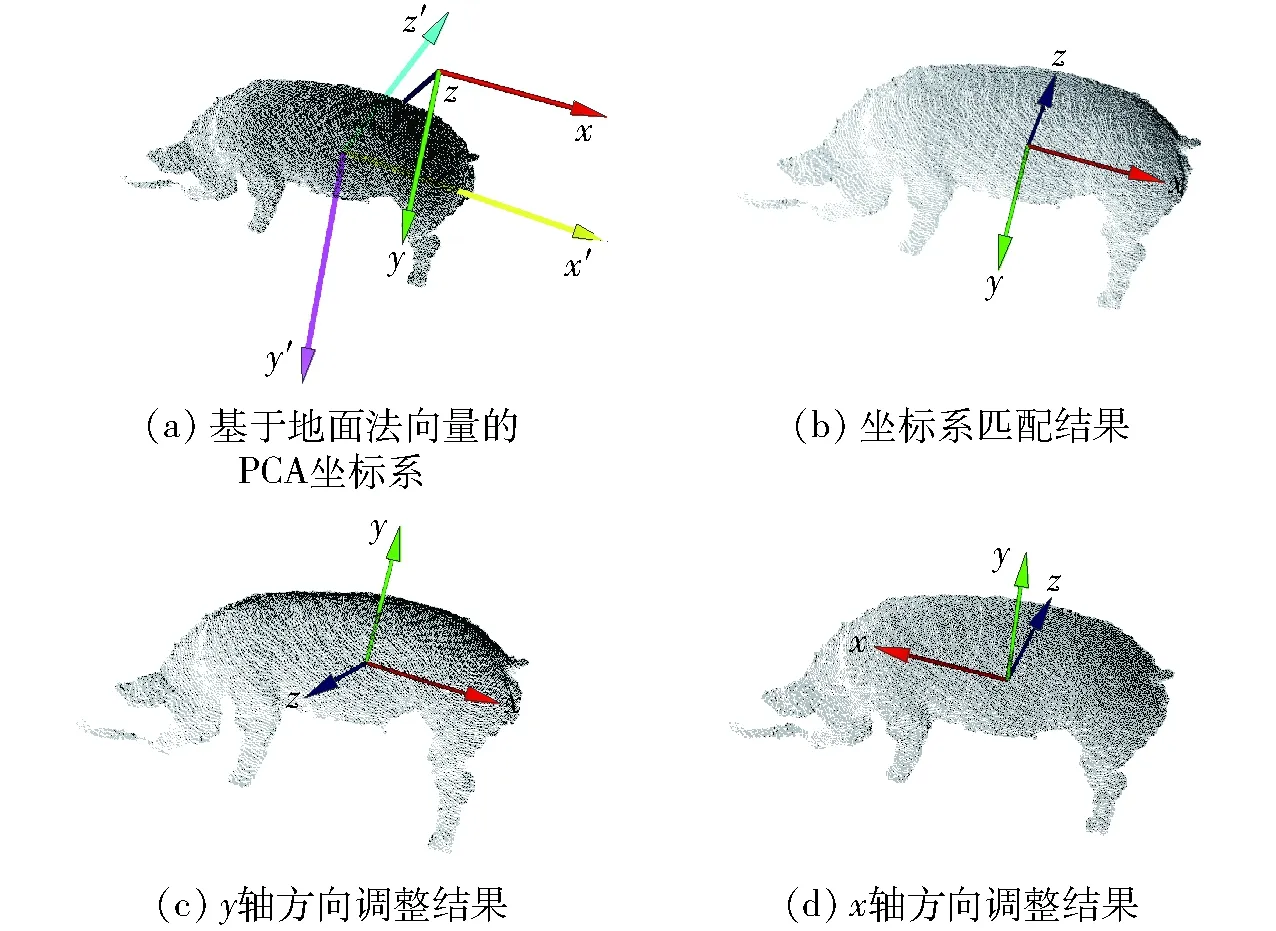
图6 姿态归一化过程Fig.6 Pose normalization process
首先检测Ct的y轴与标准测量坐标系要求的y轴方向是否一致。垂直于y轴,作平面Pg1(y=g1+hg),如图7a所示,其中g1为变换后地面任意点Vpl1的y轴坐标值,参数hg可设置为小于猪只身高大于零的任意值,根据本试验选取猪只品种和日龄,参数hg设定为0.15。当平面Pg1与Ct的交集为非空集合时,Ct的y轴方向与标准测量坐标系要求的y轴方向一致,不需要进行调整,当平面Pg1与Ct的交集为零时,y轴方向不一致,需要对Ct沿xOz平面进行平面镜像,使y轴方向与标准测量坐标系一致,调整后的猪体点云记为Ct1,y轴方向调整后结果如图6c所示。
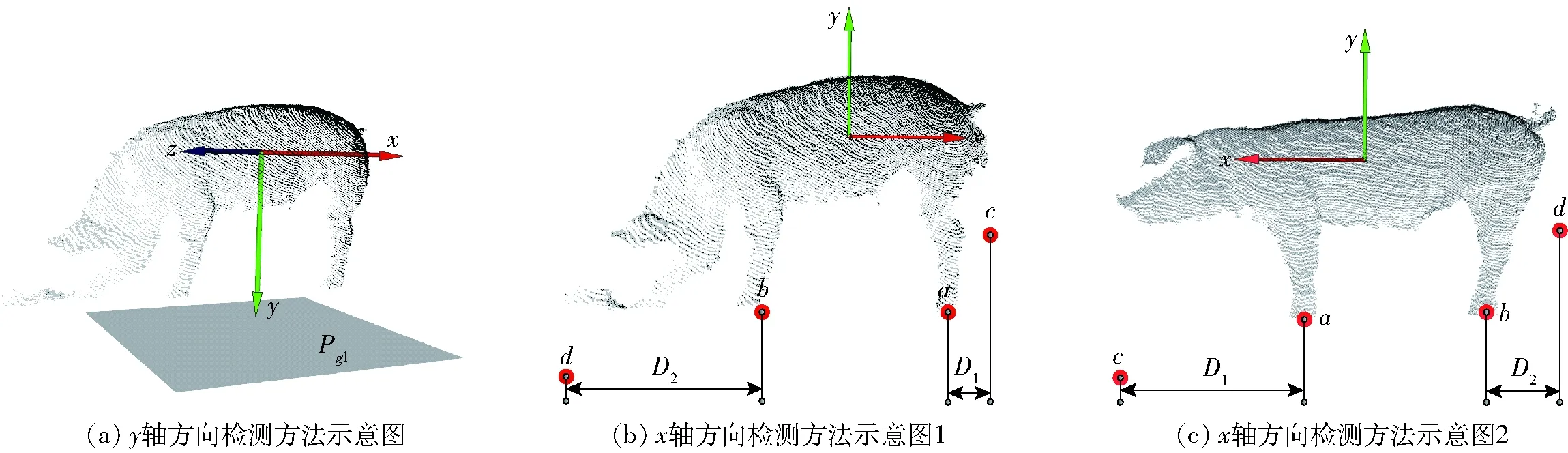
图7 坐标轴方向检测方法示意图Fig.7 Diagrams of detection method of coordinate orientation
然后检测Ct1的x轴与标准测量坐标系要求的x轴方向是否一致。如1.1节所述,获取的单视角猪体点云包括尾部数据和耳部数据,在这种数据的前提下,如图7b所示,猪体的前腿重心到猪头部顶端的x轴方向距离大于后腿重心到猪尾部顶端的x轴方向距离,本文利用这种观察,检测x轴方向是否一致。首先计算猪体两腿重心a和b,在x轴正方向的x坐标记为xf1,在x轴负方向的记为xf2,然后计算猪体在x轴方向的极大值点c和极小值点d,分别记为xmax和xmin,然后计算D1=|xf1-xmax|,D2=|xf2-xmin|,最后比较D1和D2的大小。如果D1大于D2,不需要进行调整,如图7c所示;如果D1小于D2,需要对Ct沿yOz平面进行平面镜像,如图7b所示,调整后的猪体点云记为Ct2,x轴方向调整后结果如图6d所示。
经过对x坐标轴和y坐标轴方向检测后,Ct2的x、y、z轴与标准测量坐标系x、y、z轴重合,并且方向一致,实现了猪体点云的姿态归一化。
1.4 对称平面检测

图8 猪体镜像过程Fig.8 Pig body mirror reflection process
对称性作为一种几何属性,在三维几何模型的语义分析领域发挥重要的作用[18-20]。目前,基于对称面的模型重建主要应用在逆向工程中[22-23],即对于残缺的点云数据,利用较好的一侧点云信息,通过对称面镜像,得到完整的点云模型。而目前的三维对称面检测方法[24-26]都是基于物体内部数据的对称性进行检测,而碍于猪场的实际情况,本系统获取的单视角猪体点云本身含有的对称数据较少甚至没有,所以,难以应用上述方法检测对称面, 因此,归一到标准坐标系后,本文利用地面法向量结合猪体形态特征检测猪体对称平面。图5为猪体模型完整扫描数据,通过观察可以发现猪体在背部弯曲较小的情况下,猪体本身对称平面Ps的2个方向向量分别与地面法向量和猪体前后方向相一致,并且该对称平面经过尾根点。
1.4.1对称平面法向量检测
归一到标准坐标系后,如图6d所示,支撑猪体Ct2的地面法向量npt(指向猪体部分)的方向向量与y轴正方向一致,所以npt=(0,1,0);猪体前后方向dt(即从尾部指向头部的方向)与x轴正方向一致,所以dt=(1,0,0);然后令对称平面上的2个方向向量相乘得到对称平面的法向量mt,mt的计算公式为
mt=npt×dt
(5)
经计算,mt=(0,0,1)。
1.4.2尾根点检测
姿态归一化后,猪尾部方向与x轴负方向一致,所以x轴负方向的极值点即为猪体的尾尖点。利用文献[17]描述的方法定位尾根点,即利用尾根点与尾尖点的欧氏距离(rroot)关系对尾根点定位,本文参照文献[17],将rroot设置为0.04,尾根点检测结果如图8a所示。
最后利用检测到的尾根点M0坐标(x0,y0,z0)和已经求取的平面法向量n确定平面方程。最终得到的家畜对称平面π的方程为z=z0,对称平面检测结果如图8b所示。
1.5 镜像处理
为了获取完整猪体信息,进而进行后续的体尺测量,需要对采集到的猪体点云进行镜像处理。首先,考虑到在实际拍摄时难以保证只获得猪只单侧点云,也可能获得大部分的猪背部点云数据,直接镜像会造成背部数据的重叠,影响臀宽的测量,因此仅针对对称面一侧的猪体数据进行镜像:获取猪体在对称平面一侧的数据Ph1={(x,y,z)|z>z0},然后对Ph1中的每一个点构造齐次坐标,利用
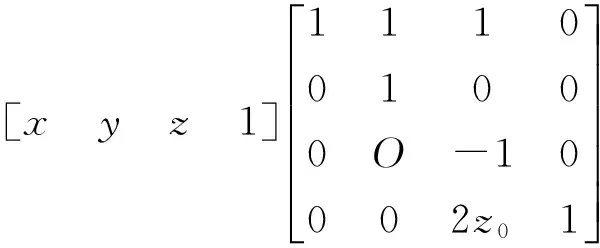
(6)
得到猪体的对称数据Ph2={(x′,y′,z′)|x′,y′,z′∈Ph2},最后令Ph=Ph1+Ph2,Ph即为完整猪体点云,如图8c所示。
1.6 体尺测量方法
将镜像得到的点云数据导入到实验室开发的体尺测量软件中,利用该软件的体尺测量功能输出猪的体长、臀宽、臀高、胸围和腹围等体尺。该软件应用VC++ 2010开发环境编写,利用QT进行界面开发。
该软件通过交互式选点方式选取体尺测点:体尺测量的起点和终点。本文交互式测量需选取的体尺测点包括颈部中点、尾根中点、体高点、臀高点、胸围测点(胸围处任一测量点)和腹围测点(腹围处任一测量点)。利用该软件测量线性体尺的示意图如图9a所示。利用B样条曲线拟合的方法计算胸围和腹围,利用该软件测量胸围和腹围的示意图如图9b所示。测量软件具体计算流程如下:首先,该软件记录交互式获取的胸围测点(腹围测点)的x方向坐标,记为xc,然后,直通滤波获取猪体点云Ph在区域[xc,xc+0.005]的点云,记为Ps, 如图10a所示,继而利用文献[27]的方法将点云Ps拟合为非均匀有理B样条曲线,如图10b所示,最后利用生成曲线对应的控制多边形长度近似曲线周长,其中拟合方法的具体参数设置如下:曲线阶数设置为3,迭代次数设置为40,控制点个数设置为100。
线性体尺长度、宽度、高度测量公式为
(7)
式中xneck、zneck——颈部中点的x坐标值和z坐标值
xtail、ztail——尾根中点的x坐标值和z坐标值
zwidth——体宽或者臀宽的z坐标值
z0——归一到全局坐标系后尾根点的z坐标值
yheight——体高点或者臀高点的y坐标值
Hground——地面的高程值,即地面或者猪体最低点的y轴方向坐标值
因为猪体的对称面为垂直于xOz坐标平面且过尾根点M0(x0,y0,z0)的平面,所以利用2(zwidth-z0)计算猪的体尺宽度。
2 结果与分析
2.1 分割算法试验结果
在威海大北农种猪科技有限公司育种场,共采集10组包含单视角猪体的场景点云数据用于验证该测量方法的准确性和可应用性,猪品种包括长白和大白两种,猪日龄为141~149 d。利用1.2节所述方法分割猪场场景中的猪体,分割结果如图11所示。从图11中可以看出,目标猪体即使有其他猪体或者猪场的相关设施等复杂背景,也实现了目标猪体的分割,但本文方法在实际应用中,也存在一定的限制性,即当目标猪体与设施或者其他猪体接触的情况下,无法将目标猪体分割,所以采集数据时,应确保目标猪体不和其他猪体或者设施接触。本文分割相关参数值具体设置如下: min为100,max为50 000,λ=0.026,N=10 000。

图9 体尺测量软件示意图Fig.9 Body measurement software diagrams

图10 曲线拟合示意图Fig.10 Curve-fitting diagrams

图11 目标猪体分割结果Fig.11 Segmentation results of target pig
2.2 对称面检测和镜像结果分析
图12为3个单视角样本不同角度下的对称面检测结果和完整猪体点云获取结果。如图12所示,当筛选出背部不存在较大弯曲的猪体点云数据时,本文方法可以利用单侧猪体点云,检测其近似对称面,并根据检测到的对称面,通过镜像获取完整猪体点云,获取的完整猪体接近猪体的原始形态。

图12 对称面检测和完整猪体获取样本结果Fig.12 Sample results of symmetry plane detection and whole pig acquisition
2.3 体尺测量精度分析
为了定量分析本文方法对猪只体尺参数的测量精度,利用自主研发的体尺测量软件进行家畜体尺测量。对10组猪的体长、臀宽、臀高、胸围和腹围进行了测量,其中体长、臀宽和臀高与人工测量的结果进行了对比,测量结果和误差如表1所示。人工测量工具为卷尺,精度为1 mm,为了避免测量猪体因身体扭曲而造成的人工测量不准确,应尽量在猪饮水或采食时进行人工测量,每个体尺指标测量3次并取中值[13]。
从表1中可以看出,体长测量的平均相对误差为5.00%,其检测值与实测值的最大、最小误差分别为11.46%和0.03%,臀宽测量的平均相对误差为7.40%,其检测值与实测值的最大、最小误差分别为13.72%和1.06%,臀高测量的平均相对误差为5.74%,其检测值与实测值的最大、最小误差分别为11.87%和1.71%。此结果的误差主要由3部分组成,一部分为深度摄像头获取的数据本身的误差,一部分为在进行镜像操作时猪体形态的变化带来的误差,另一部分为用户选取测点的不精确带来的误差。研究发现,体长的测量结果都小于人工的测量结果,这是因为猪体背部方向不可能严格笔直,存在一定弯曲,拉近了尾根点和耳根点的距离,造成了测量的体长小于人工测量结果。整体来看,该方法的体尺检测结果较好。
注:REL为体长检测值与实测值的相对误差;REw为臀宽检测值与实测值的相对误差; REh为臀高检测值与实测值的相对误差。
3 结束语
提出并实现了基于单视角点云镜像的猪体尺测量方法,选取Xtion PRO 深度相机作为点云数据采集设备,并以猪场猪体作为试验对象,利用人工体尺测量结果与该方法体尺测量结果进行了对比。结果表明,在猪体背部弯曲不严重的情况下,本文方法可以检测单视角猪体的近似对称面,并利用检测到的对称面,对单视角猪体点云镜像获取完整猪体。本文体尺测量方法具有较高的精度,体长测量的平均相对误差为5.00%,臀宽测量的平均相对误差为7.40%,臀高测量的平均相对误差为5.74%,该方法的体尺检测结果较好,可以用于家畜育种和生产领域。
1CHENG Y, LIU S, SU D, et al. Distribution and linkage disequilibrium analysis of polymorphisms of GH1 gene in different populations of pigs associated with body size[J]. Journal of Genetics, 2016, 95(1): 79-87.
2曹果清,景利芳,石建忠,等. 猪体重和体尺性状与繁殖性能间的相关[J]. 山西农业大学学报:自然科学版, 2003, 23(2): 136-138.
CAO Guoqing, JING Lifang, SHI Jianzhong, et al. Study on correlation analysis between body weight and size and reproductive performance in swine[J]. Journal of Shanxi Agricultural University: Science & Technology, 2003, 23(2): 136-138. (in Chinese)
3WILD J J. The use of ultrasonic pulses for the measurement of biologic tissues and the detection of tissue density changes[J]. Surgery, 1950, 27(2): 183-188.
4SMITH M T, OLTJEN J W, DOLEZAL H G, et al. Evaluation of ultrasound for prediction of carcass fat thickness and longissimus muscle area in feedlot steers[J]. Journal of Animal Science, 1992, 70(1): 29-37.
5郭浩,张胜利,马钦,等. 基于点云采集设备的奶牛体尺指标测量[J]. 农业工程学报, 2014, 30(5): 116-122.
GUO Hao, ZHANG Shengli, MA Qin, et al. Cow body measurement based on Xtion[J]. Transactions of the CSAE, 2014, 30(5): 116-122. (in Chinese)
6郭浩,王鹏,马钦,等. 基于深度图像的奶牛体型评定指标获取技术[J/OL]. 农业机械学报,2013, 44(增刊1): 273-276. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=2013s149&journal_id=jcsam. DOI:10.6041/j.issn.1000-1298.2013.S1.049.
GUO Hao, WANG Peng, MA Qin, et al. Acquisition of appraisal traits for dairy cow based on depth image [J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(Supp.1): 273-276.(in Chinese)
7SALAU J, HAAS J H, JUNGE W, et al. Feasibility of automated body trait determination using the SR4K time-of-flight camera in cow barns [J]. Springer Plus, 2014, 3(1): 225.
8SONG X, SCHUTTEA J, VAN DER Tol P, et al. Body measurements of dairy calf using a 3-D camera in an automatic feeding system[C]∥Proc. AgEng 2014: International Conference of Agricultural Engineering C, 2014:1-8.
9KAWASUE K, IKEDA T, TOKUNAGA T, et al. Three-dimensional shape measurement system for black cattle using KINECT sensor[J]. International Journal of Circuits, Systems and Signal Processing, 2013, 7: 222-230.
10MARINELLO F, PEZZUOLO A, CILLIS D, et al. Application of Kinect-Sensor for three-dimensional body measurements of cows[C]∥Proceedings of 7th European Conference on Precision Livestock Farming, ECPLF,2015: 15-18.
11SALAU J, HAAS J H, JUNGE W, et al. Automated calculation of udder depth and rear leg angle in Holstein-Friesian cows using a multi-Kinect cow scanning system[J]. Biosystems Engineering, 2017, 160: 154-169.
12刘同海,滕光辉,付为森,等. 基于机器视觉的猪体体尺测点提取算法与应用[J]. 农业工程学报,2013,29(2): 161-168.
LIU Tonghai, TENG Guanghui, FU Weisen, et al. Extraction algorithms and applications of pig body size measurement points based on computer vision [J]. Transactions of the CSAE, 2013, 29(2): 161-168. (in Chinese)
13李卓,杜晓冬,毛涛涛,等. 基于深度图像的猪体尺检测系统[J/OL]. 农业机械学报,2016, 47(3): 311-318. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20160344&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2016.03.044.
LI Zhuo, DU Xiaodong, MAO Taotao, et al. Pig dimension detection system based on depth image[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(3): 311-318.(in Chinese)
14刘同海,滕光辉,张盛南,等. 基于点云数据的猪体曲面三维重建与应用[J/OL]. 农业机械学报,2014, 45(6): 291-295. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140644&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.06.044.
LIU Tonghai, TENG Guanghui, ZHANG Shengnan, et al. Reconstruction and application of 3D pig body model based on point cloud data[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(6): 291-295.(in Chinese)
15郭浩,马钦,张胜利,等. 基于三维重建的动物体尺获取原型系统[J/OL]. 农业机械学报,2014, 45(5): 227-232. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20140535&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2014.05.035.
GUO Hao, MA Qin, ZHANG Shengli, et al. Prototype system of shape measurements of animal based on 3D reconstruction[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(5): 227-232. (in Chinese)
16GUO H, MA X, MA Q, et al. LSSA_CAU: an interactive 3d point clouds analysis software for body measurement of livestock with similar forms of cows or pigs [J]. Computers and Electronics in Agriculture, 2017, 138: 60-68.
17王可,郭浩,刘威林,等. 基于点云旋转归一化的猪体体尺测点提取方法[J]. 农业工程学报,2017, 33(增刊1): 253-259.
WANG Ke, GUO Hao, LIU Weilin, et al. Extraction methods of pig body size measurement points based on rotation normalization of the point cloud [J]. Transactions of the CSAE, 2017, 33(Supp.1):253-259. (in Chinese)
18MAURICE X, GRAEBLING P, DOIGNON C. Real-time structured light coding for adaptive patterns [J]. Journal of Real-Time Image Processing, 2013, 8(2): 169-178.
19CARLES G, MUYO G, BOSCH S, et al. Use of a spatial light modulator as an adaptable phase mask for wavefront coding [J]. Journal of Modern Optics, 2010, 57(10): 893-900.
20SHPUNT A, ZALEVSKY Z. Depth-varying light fields for three dimensional sensing: US 8050461[P]. 2011-11-01.
21VON H W, MICHAELSEN E, THONNESSEN U. Cluster analysis and priority sorting in huge point clouds for building reconstruction[C]∥18th International Conference on Pattern Recognition, ICPR 2006, 2006, 1: 23-26.
22柯映林,朱伟东. 基于局部特征匹配的对称面提取算法[J]. 计算机辅助设计与图形学学报,2005, 17(6): 1191-1195.
KE Yinglin, ZHU Weidong. Study on symmetry plane extraction from point cloud based on local geometric symmetry[J]. Journal of Computer-Aided Design & Computer Graphics, 2005, 17(6): 1191-1195.(in Chinese)
23金涛,许跃敏,童水光. 一种用于逆向工程的对称平面重建方法[J]. 浙江大学学报:工学版, 2002, 36(6): 104-108.
JIN Tao, XU Yuemin, TONG Shuiguang. A simple and efficient method for reconstructing symmetry plane in reverse engineering[J]. Journal of Zhejiang University:Engineering Science, 2002, 36(6): 104-108.(in Chinese)
24MITRA N J, GUIBAS L J, PAULY M. Partial and approximate symmetry detection for 3D geometry[J]. ACM Transactions on Graphics, 2006, 25(3): 560-568.
25金涛,陈建良,童水光. 三维模型对称平面重建的特征匹配方法[J]. 计算机辅助设计与图形学学报, 2003, 15(5): 616-620.
JIN Tao, CHEN Jianliang, TONG Shuiguang. Reconstructing symmetry plane by feature matching [J]. Journal of Computer-Aided Design & Computer Graphics, 2003, 15(5): 616-620.(in Chinese)
26SFIKAS K, THEOHARIS T, PRATIKAKIS I. Pose normalization of 3D models via reflective symmetry on panoramic views[J]. The Visual Computer, 2014, 30(11): 1261-1274.
27MÖRWALD T. Object modelling for cognitive robotics[D]. Wien Vienna: University of Technology, 2013.
猜你喜欢
农业工程学报(2022年13期)2022-10-09 13:27:20
今日农业(2022年11期)2022-07-02 11:45:44
东北农业大学学报(2021年9期)2021-11-11 12:22:12
今日农业(2020年15期)2020-12-15 10:16:11
农民致富之友(2020年22期)2020-09-02 06:28:24
中学生数理化·七年级数学人教版(2018年4期)2018-06-28 03:26:28
数学大世界(2018年1期)2018-04-12 05:39:03
今日农业(2017年2期)2017-12-08 08:54:25
中等数学(2017年2期)2017-06-01 12:21:50
乡村科技(2014年11期)2014-03-04 02:48:26
