
虚实合成试验中弹目相对运动模拟技术研究∗
2018-03-31 06:04李晓斌卢道伟
舰船电子工程 2018年3期
李晓斌 卢道伟
1 引言
目前,反舰导弹的试验与鉴定主要基于四种模式,即内场仿真试验(包括半实物仿真试验和全数字仿真试验)、飞行试验、对海静态试验和动态带飞试验[1]。其中,内场仿真试验易实现,成本低,可重复,边界条件覆盖性好,但需要对导弹、目标及干扰精确建模才能真实地反映实际工作情况,而现有模型的置信度有待提高;导弹飞行试验可以真实反映实际工作过程,但成本高,不能大量重复进行,覆盖工作条件有限;对海静态试验和动态带飞试验成本介于仿真试验和飞行试验两者之间,目标、干扰均为实物,战场环境与飞行试验环境一致,但对海静态试验中导引头固定放置,不能实现导弹和目标之间的相对运动;动态带飞试验涉及动用试验兵力,成本较高,同时也无法实现对导弹从导引头到控制系统全流程进行抗干扰验证。
综合考虑上述四种试验模式各自的优缺点,本文创新提出了反舰导弹抗干扰虚实合成试验的模式,重点针对在该试验模式下模拟导弹和目标、干扰之间运动关系的技术手段进行深入研究,包括导弹在运动过程中,目标和干扰相对导弹的距离、角度、角速度、张角、多普勒频移及目标RCS起伏等。
2 反舰导弹抗干扰虚实合成试验
反舰导弹抗干扰虚实合成试验是采用通用接口技术,将导弹导引头实装、模拟器、半实物仿真系统、数字仿真系统、真实和模拟的目标及环境(包括自然环境和干扰环境)组合到一起,通过统一的公共仿真平台进行调度管理,使内场及外场各种试验资源协同工作,从而对反舰导弹的各项战技性能进行考核的试验模式。具体实施方案如图1所示。
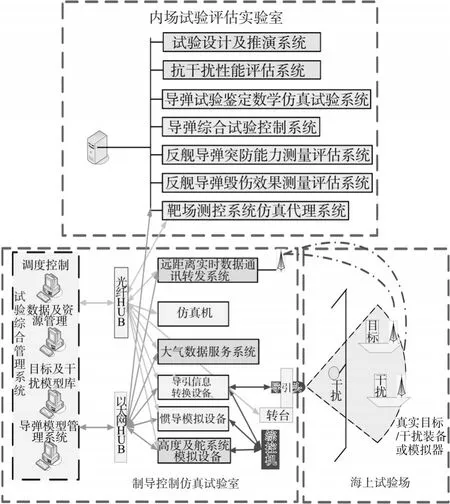
图1 反舰导弹抗干扰虚实合成试验方案
图1 中,反舰导弹抗干扰虚实合成试验系统由内场合外场共三个场地的试验系统联合实现,内场试验系统包括试验评估试验室和制导控制仿真试验室,外场试验系统为海上试验场。三个试验场地通过以太网、光纤网及实时无线通讯网有机连接。其中,以太网络用于试验前的试验想定、配置文件及试验后的结果数据的非实时传输;光纤网络用于试验过程中各仿真节点之间的实时数据交互;实时无线通讯网络用于内、外场目标及干扰数据实时交互。
制导控制仿真试验室内固定放置一套三轴转台,转台面朝海上试验场,转台上安装导引头实装,利用仿真机、导引信息转换设备、惯导模拟设备、大气数据服务系统等各类仿真模拟设备实现弹道飞行解算及导引头、综合控制机外围工作环境及大气环境的模拟。海上试验场利用真实的舰船、干扰装备或目标模拟器、干扰模拟器实现真实海背景下目标和干扰环境的模拟。内场试验评估实验室负责完成试验方案设计、试验推演及试验过程中实时监控,并完成导弹性能的鉴定与评估。
为实现反舰导弹虚实合成试验系统闭合回路,以下内容研究反舰导弹飞行过程中导弹和目标的相对运动关系,模拟包括距离、角度、角速度、张角、多普勒频移及目标RCS起伏。
3 距离变化的模拟
由于导引头架设于三轴转台上,位置信息不变,而真实舰船目标不能产生高速运动,因此要实现距离上弹目相对运动,可由目标或干扰模拟器在反舰导弹弹道模型的驱动下对导引头信号进行储频、延迟、转发,进而进行坐标转换,形成距离不断变化的接近真实反舰导弹与目标/干扰之间的相对运动。
导引头与模拟目标之间的距离可通过导引头雷达发射和接收信号之间的延迟时间来计算,计算公式为

式中c为光速,tR为目标模拟器每次接收到导引头照射信号后,发射回波信号的延迟时间。可通过有规律地改变目标模拟器每次发射回波信号的延迟时间来实现距离上的变化,从而达到实现弹目距离上相对运动的目的[2~4]。
4 角度变化的模拟
角度上的弹目相对运动加载通过两个途径来实现,一种途径是通过目标/干扰运动模拟器加载目标/干扰模拟器的方式来实现,另一种途径是采用三轴转台的转动来模拟角度变化的方式来实现。角速度的模拟则采用角度微分计算的方法获取。上述两种途径在实际试验中可以综合使用,也可以单独使用,需要根据试验情况灵活掌握。
4.1 目标/干扰运动模拟器模拟角度变化技术
目标/干扰运动模拟器用来复现并模拟目标/干扰的运动过程,其功能是完成弹目之间的相对运动特性。可按规定的精度实现位置预定、正弦规律运动,可按外部接口输入的信号复现目标的运动,实时向外部接口输出、记录和显示二维位置移动数据、具备调平功能和可拆卸、拼装式叉车搬运和吊车搬运的条件。
目标运动模拟器的原理图如图2所示,目标运动模拟器在真实海背景下放置于导引头正前方,目标/干扰模拟器通过自身的收发共用天线接收导引头的发射信号,并对接收信号进行储频、延迟,然后通过收发共用天线将目标回波信号转发回导引头。目标扫描架的X轴导轨与Z轴导轨呈十字型放置,支撑柱固定于地面,X-Z轴导轨长度可根据实际需要进行定制,X轴导轨固定于支撑柱上,Z轴导轨置于X轴导轨的轨道上并通过伺服控制系统实现水平方向(方位)上以一定速度的移动;目标模拟器的收发共用天线置于Z轴导轨的轨道上并通过伺服控制系统实现垂直方向上(俯仰)以一定速度的移动,从而模拟实现导弹和目标在角度上的相对运动。
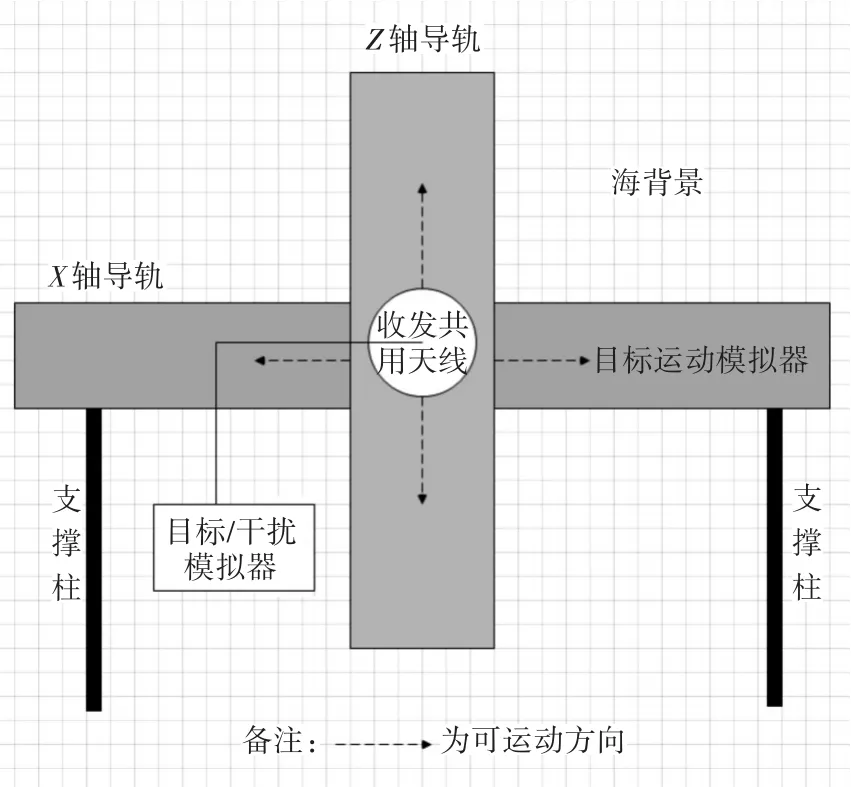
图2 目标/干扰角度运动模拟器
4.2 三轴转台模拟角度变化技术
三轴转台模拟角度变化的原理是由内场“试验评估实验室”进行弹道解算并将解算得到的弹道数据通过光纤网实时发送到外场对海试验平台的仿真计算机,仿真计算机实时解算弹目视线角,并叠加弹体姿态和弹目视线角实时变化量,驱动转台进行方位、俯仰和横滚三自由度运动,从而实现目标角度变化的模拟。
5 张角变化的模拟
导弹逼近目标和干扰过程张角模拟,实现较为困难。在远距离时,目标和干扰相对于导引头的张角变化不大,而当模拟近距离时,目标和干扰相对于导引头的张角变化急剧加大,事实上不论是用真实的军舰还是小船都难以模拟近距离时弹速条件下相对角度的变化。针对该问题拟采取两种方法:1)若采用实装目标/干扰装置或目标/干扰模拟器方案可以通过设置适当场景的方法实现抗干扰性能的验证。如将场景设置在边界条件上,使得装载干扰装置的小船可以在需要时迅速移出导引头天线波束范围,实现不同角度分辨单元的干扰场景;2)如图3所示,采用实装目标/干扰模拟器方案,可将干扰天线放置在距离导引头一定距离的龙门架上,通过控制干扰天线在龙门架的十字架上运动,实现近距离时弹速条件下目标、干扰相对角度的快速变化的模拟。
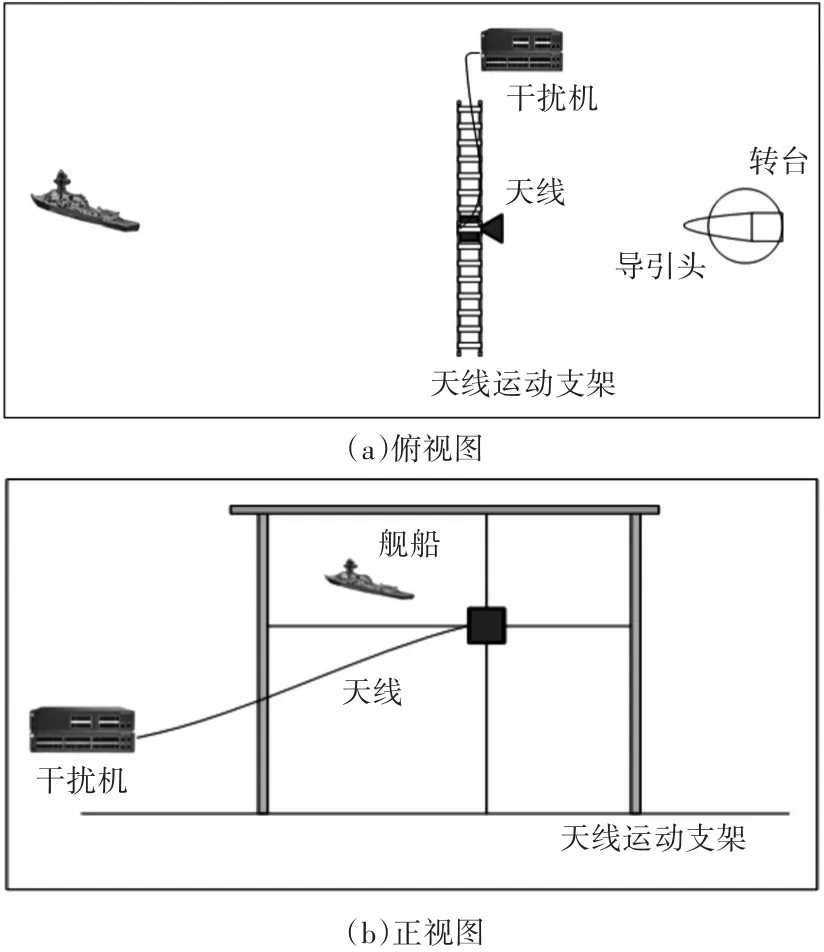
图3 弹速条件下目标、干扰相对角度快速变化的模拟方案
6 回波目标多普勒频移的模拟
对目标信号的多普勒频率及其变化的模拟主要是采用多普勒效应原理,进行模拟时,不仅要保证频率的灵活变化还要保证变其变化过程中相位连续性。在实际工程中,常常用直接数字式频率综合器(DDS)来产生目标回波信号的多普勒频率,它所产生的回波信号的多普勒频率的稳定度好、相位噪声小而且精度很高,能够完全满足多普勒频率模拟的需要。
7 标的RCS起伏特性模拟
根据雷达方程,理想情况下,雷达导引头收到的目标信号功率可用下式计算:

式中,PT为雷达导引头发射功率;GT为雷达导引头发射天线增益;Gr为雷达导引头接收天线增益;σ为目标散射截面积;R为雷达导引头与目标间的斜距;L 为功率损耗因子[5~6]。
而雷达导引头接收到的模拟目标的功率为

式中,PT′为目标模拟器发射功率;GT′为目标模拟器发射天线增益;r为雷达导引头与目标模拟器天线间的距离;Gr′为雷达导引头接收天线增益;λ为雷达导引头工作波长。
为使得干扰逼真模拟目标,应尽量使得Pr=Pr′,可得:


式(5)中,σ不是一个常数,而是随机起伏的,这是因为目标散射面积将随着雷达视角变化而起伏变化,所以,在雷达与目标的相对运动中,视角的变化必然引起雷达散射截面积的起伏。为说明目标信号起伏,必须确定起伏的概率密度函数及其相关函数。但是,由于大多数实际目标都是很复杂的,相对运动中视线角随机变化所产生的散射截面积起伏的概率密度分布式很难分析的,很难用准确的数学公式来描述,只能用一个比较接近而又合理的数学模型来描述。实际经验证明,该分布往往接近于2k自由度的 χ2分布:

σˉ为σ在目标起伏全过程的平均值。
Swerling分析过这种一般形式的起伏特性:
1)当k=1时,散射截面积起伏是负指数分布:

实际是个2自由度(k=1)的 χ2分布。这种分布比较适合雷达目标由大量散射元组成,其中没有单独一个(或只有几个)散射元起主导作用。这种分布的电压振幅为瑞利分布,所以,这种目标通常叫“瑞利目标”。它是SwerlingⅠ(慢起伏)和Swer⁃lingⅡ(快起伏)的两类分布。
2)当 k=2时,式(6)为

它是一种4自由度(k=2)的 χ2分布。是SwerlingⅢ(慢起伏)和SwerlingⅣ(快起伏)的两类分布。
可以用前两种情况表示的目标,是由数量很多,弹雷达截面积大体上相同的散射体所组成。尺寸远大于波长的目标,属于这两种情况。
后两种情况适用于目标由一个大反射体和许多小的反射体组成,或者由一个大反射体组成而方向变化很小的场合。
对于非频率捷变雷达导引头,通常用慢起伏模型,对于频率捷变雷达,通常用快起伏模型。
8 载频信息的实现
目标模拟器产生的回波信号必须与导引头发射信号保持良好的相干性,这就要求系统首先能够从发射信号中准确地提取载波信号,并将此载波信号作为回波信号的载波,为此,系统采用锁相环路设计。
1)锁相接收机前端配置有AGC(自动增益控制)模块,该模块能有效防止功率漂移对频率标定的影响,用于抑制接收信号电平的波动,为后级电路提供一个比较稳定的电平,从而保证了系统内信号的稳定性。
2)锁相环(PLL)可以实现对中频信号频率的自动跟踪,并将其作为参考信号控制环路内部振荡信号的频率和相位,此设计可以使系统内信号频率和导引头发射频率保持一致。
3)主控电路通过控制电压改变压控振荡器(VCO)中电容的电容量,进而改变振荡回路谐振频率。压控振荡器一般具有极高的谐波抑制比和极低的信号杂散,产生的回波信号具有纯净的频谱特性,信号谐波与杂散一般小于-80dB。
4)频率标定部分是锁相环路设计的重点。它接收中频信号,测量该信号载波频率,根据测量结果确定反馈调整量,通过串口调节频率合成信号源输出频率。频率标定部分标定的频率精度,将影响锁相接收机最终能否锁定。
9 结语
本文在总结内场仿真试验、飞行试验、导引头对海静态试验和挂飞试验优缺点的基础上,为了降低试验消耗,加强边界条件考核,创新提出了反舰导弹抗干扰虚实合成试验的模式。为实现反舰导弹抗干扰虚实合成试验系统闭合回路,本文重点研究了模拟实现弹目相对运动的方法,从而模拟反舰导弹飞行过程中导弹和目标的相对运动关系,包括距离、角度、角速度、导弹逼近目标和干扰过程中张角的变化、多普勒频移、目标RCS起伏及载频信息的实现,为后续的工程实现进行了理论探索。
[1]曲宝忠.等.海军战术导弹试验与鉴定[M].北京:国防工业出版社,2010.
[2]曲宏宇.靶场虚实合成多目标作战试验环境构建方法[J].装备学院学报,2015(4):125-128.
[3]李一.反舰导弹突防虚实合成试验方法[J].火力与指挥控制.2012,37(10):185-188.
[4]王国玉.无边界靶场[M].北京:国防工业出版社,2007.
[5]丁鹭飞.等.雷达原理[M].北京:电子工业出版社,2009.
[6]高烽.雷达导引头概论[M].北京:国防工业出版社,2001.
猜你喜欢
汽车实用技术(2022年5期)2022-04-02
小哥白尼(趣味科学)(2021年6期)2021-11-02
故事作文·高年级(2021年4期)2021-05-06
小哥白尼(神奇星球)(2021年11期)2021-03-08
数字海洋与水下攻防(2020年5期)2021-01-04
舰船电子工程(2019年10期)2019-11-13
兵器装备工程学报(2019年10期)2019-11-08
空天防御(2019年3期)2019-08-23
火力与指挥控制(2019年6期)2019-07-20
兵器知识(2017年10期)2017-10-19
