基于模糊PID控制的靶板横摇调节系统研究
2018-03-29 05:12吕琼莹刘朋孟宪宇孙传文薛珊
长春理工大学学报(自然科学版) 2018年1期
吕琼莹,刘朋,孟宪宇,孙传文,薛珊
(长春理工大学 机电工程学院,长春 130022)
遥控靶车是为弹射武器试验而研制的带靶板、模仿装甲车行驶运动的远程操控靶车,主要用于承载战斗射击纱布靶或木板靶,通过靶车移动平台为部队射击训练提供移动目标,为部队实战化作战训练提供了强有力的技术支持[1]。因此靶板命中率成为衡量军队作战实力的重要标准。
但由于靶板具有重心高、质量大、转动惯量大等特点,在靶车高速行驶过程中,在路面激励的影响下,靶车会发生横摇和纵摇,由于靶车车体较长,靶车的纵摇对靶车整体稳定性影响较小,但靶板的横向力经常接近极限状态,使靶车的平衡状态遭到破坏,严重时会发生靶车侧翻等危险情况。这样不但会引发意外事故,更严重影响了士兵的射击水平,降低了军队训练的效率,限制了军队野外作战能力的提高。因此,如何控制靶板横摇成为了国内外学者的研究热点。
本文在分析靶车行驶过程中的非线性干扰问题的基础上,设计了基于模糊控制和PID控制相结合的靶板横摇调节系统,实现了靶板在非线性路面激励下能够始终垂直于地面。
1 靶板横摇调节系统设计
根据靶车实际工作环境,对靶车进行结构设计,由电机带动靶板实现倾角调节,其整体结构的示意图如图1所示。

图1 靶车整体结构示意图
靶车横摇调节系统设计如图2所示,其工作原理为:靶车在野外行驶过程中,由安装在靶车车架上的倾角传感器将车辆的倾角信息反馈给控制器,通过与上位机设置的倾角信号进行对比,将偏差信号送入控制器,控制器通过对信号进行计算和处理[2],输出相应的控制策略,经过PWM功率放大器转化为电压信号,驱动直流力矩电机转动,并带动齿轮的运动,从而带动靶板偏转,实现靶板的自适应调节[3]。从而使靶板始终垂直于地面。
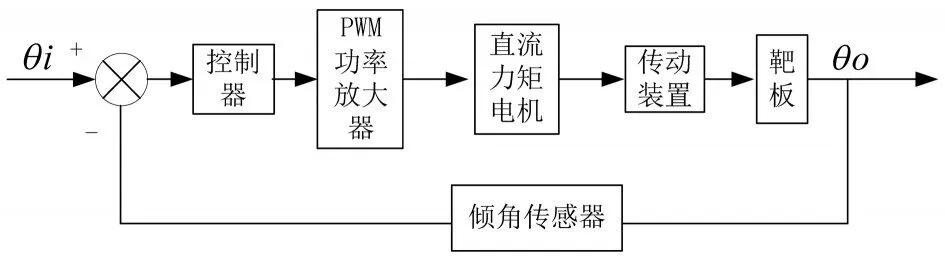
图2 横摇调节控制框图
2 靶板的模糊PID控制器设计
2.1 模糊PID控制器的原理
传统PID控制方法具有许多优点,但一般线性系统。而车体的震动是一个非线性干扰,不能运用传统的PID控制算法。
模糊控制算法最大的特点是不受被控对象的精确数学模型的限制,可以实现对非线性系统进行实时控制。所以对于非线性系统而言具有很大的优势[4]。因此,本文综合传统PID控制和模糊控制的优点,提出了靶板横摇调节模糊自整定PID方法,通过对PID参数进行实时调整,提高了系统的调节精度和动态特性,其控制原理如图3所示。
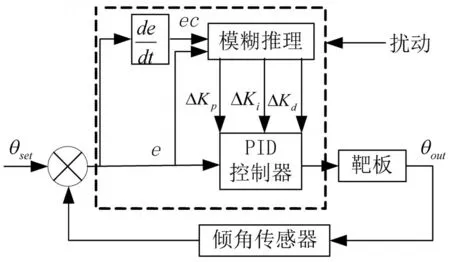
图3 模糊控制原理图
2.2 模糊子集定义
模糊PID控制系统以误差e和误差率ec做为输入信号,以PID参数的三个调节量ΔKp、ΔKi和ΔKd做为输出信号,通过已建立的模糊控制规则对系统输出作出判断,实现对PID调整参数ΔKp、ΔKi和ΔKd进行在线调整,从而满足系统在非线性干扰条件下对PID控制参数的调整要求。因此,本控制系统中PID控制器的输出A参数可表示为:
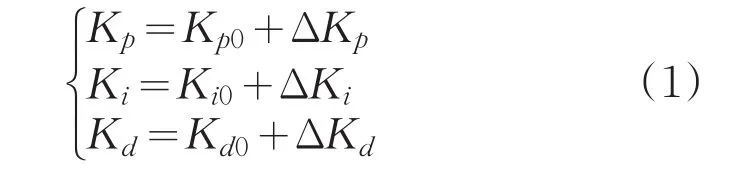
式中,Kp0、Ki0、Kd0分别表示控制PID的初始值。
模糊控制规则的细化程度决定了模糊规则的个数,同时也决定了系统的响应速度和控制精度。本文中模糊控制器的输入e、ec和输出ΔKp、ΔKi、ΔKd在模糊集上的论域为{-3,-2,-1,0,1,2,3,},模糊子集定义为{NB(负大),NM(负中),NS(负小),ZO(零),PS(正小),PM(正中),PB(正大)}。根据前期对PID参数的整定及控制经验,确定e和ec的精确论域分别为[-1,1],[-5,5],因此得到量化因子分别为:Ke=3/1=3,Kec=3/5=0.6;调整参数 ΔKp、ΔKi、ΔKd的精确论域分别为[-24,24],[-3,3],[-0.03,0.03],得到比例因子分别为:Kp=24/3=8,Ki=3/3=1,Kd=0.03/3=0.01。
在为相关变量选择隶属度函数时,当变量误差范围较小时,采用分辨率高的三角函数;当变量误差范围较大时,采用分辨率低的高斯函数[5],相应的隶属度函数如图4、图5所示。
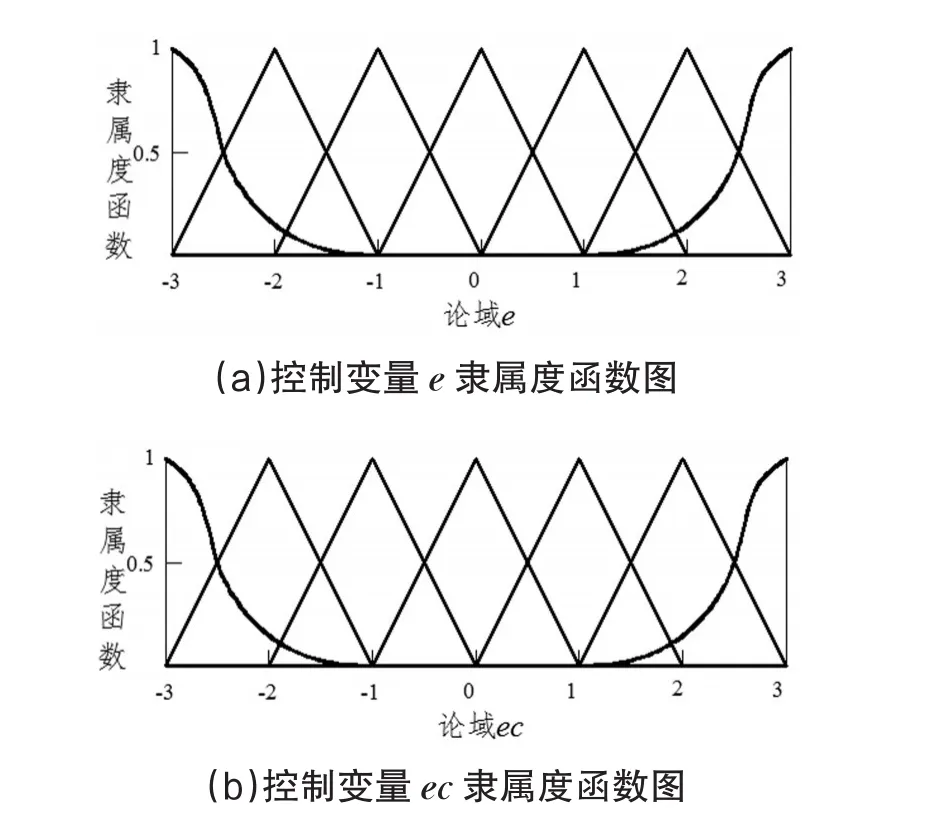
图4 偏差e与偏差变化率ec隶属度函数图

图5 控制变量ΔKp、ΔKi、ΔKd隶属度函数图
2.3 模糊规则确定和去模糊化
模糊PID的模糊控制规则就是针对不同的偏差e及其变化率ec作为输入信号建立相应的Kp、Ki、Kd规则:
(1)当|e|较大时,为了使系统响应速度提高,应取较大的Kp和较小的Kd,并使Ki=0以避免过大的超调;
(2)当|e|为中等大小时,为了避免系统超调量过大,应该取较小的Kp,适当的Ki、Kd,以保证系统的响应速度;
(3)当|e|较小时,为避免系统振荡,需要根据|ec|值的大小选择Kd,当|ec|值较大时候,需要取较小的Kd值,通常情况下Kd值取中等大小即可[6]。
通过以上控制规则建立输入量e、ec和输出量ΔKp、ΔKi、ΔKd之间的模糊语句,并通过对系统不断调试,对模糊规则进一步修改,从而得到模糊规则表,如表1至表3所示。
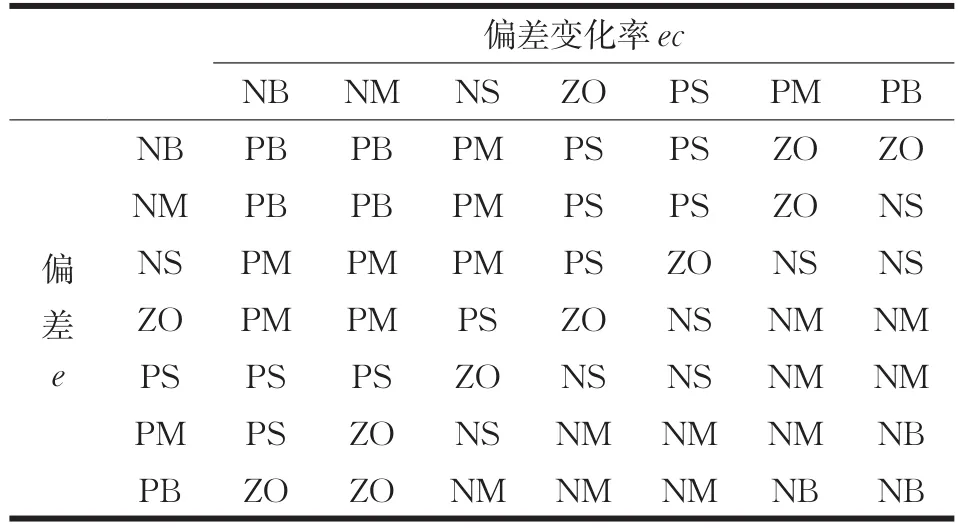
表1 ΔKp模糊控制规则表
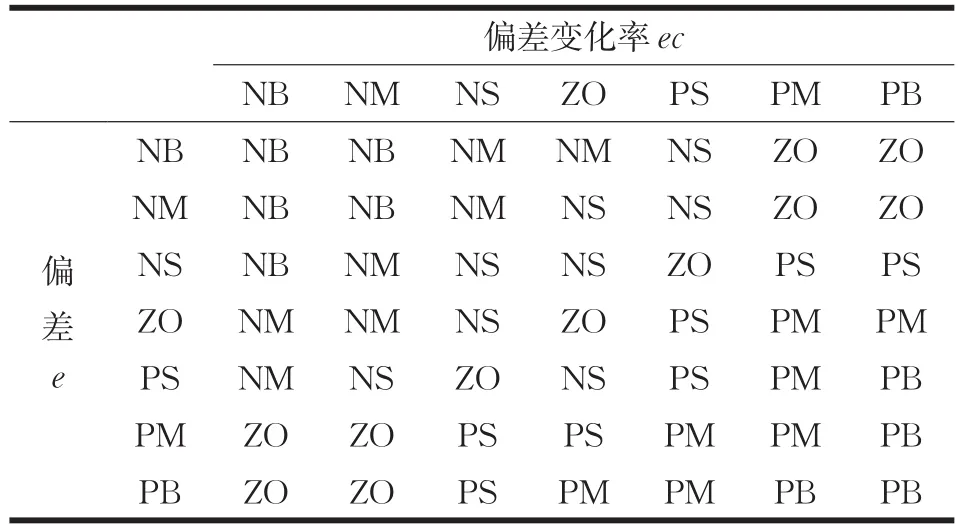
表2 ΔKi模糊控制规则表
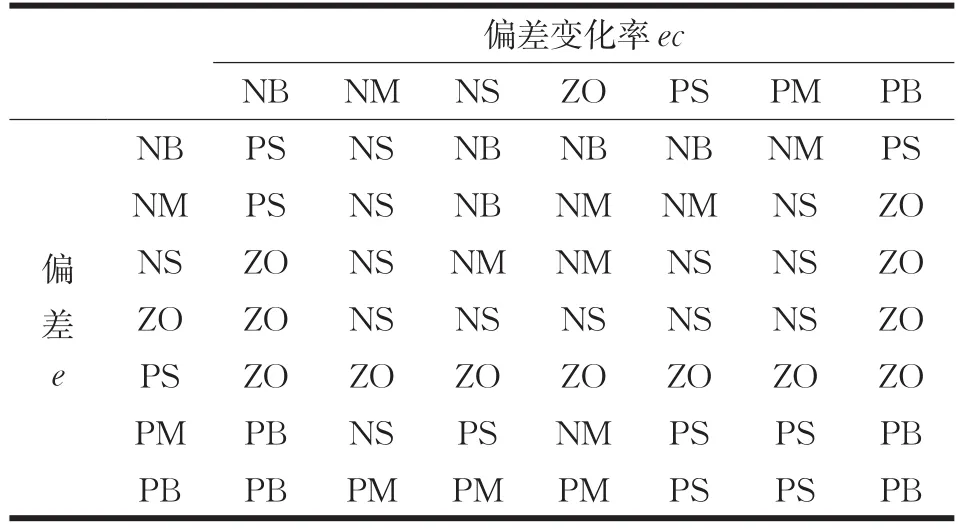
表3 ΔKd模糊控制规则表
模糊推理采用Mamdani的max-min合成法模糊规则形式为:

经过模糊推理后,模糊控制器输出的调整参数为模糊量,因此需要对其进行精确化求得精确量。调节系统采用的清晰化方法为加权平均法[7],取模糊控制输出量的隶属函数曲线与横坐标轴所围成面积的重心为代表点,所对应的值即为控制决策值,即在某一采样时刻,PID控制器参数的调整量可由模糊控制器输出值的重心来确定[8],即可求得输出ΔKp、ΔKi、ΔKd的精确值:

式中,ai(kj)为kj的隶属度。
3 仿真分析
使用MATLAB/Simulink模块建立靶板横摇调节系统的仿真模型如图6、图7所示。根据130LY51永磁直流力矩电动机相关参数以及模拟实验装置相关计算数据,设置参数如表4所示。
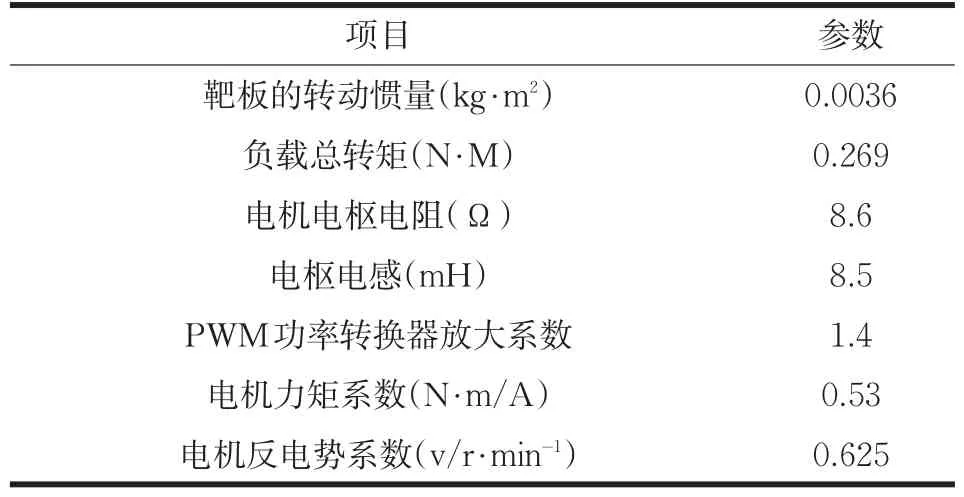
表4 模型各参数表
对模糊PID控制系统和经典PID控制系统进行仿真对比,设定仿真时间为0.4s,步长为0.00001s,输入信号为单位阶跃信号,在0.2s处加入阶跃干扰信号。仿真得到在脉冲信号和锯齿波信号不同干扰信号输入下,两种控制方法的仿真曲线如图8、图9所示。

图6 经典PID仿真模型图

图7 模糊PID仿真模型图
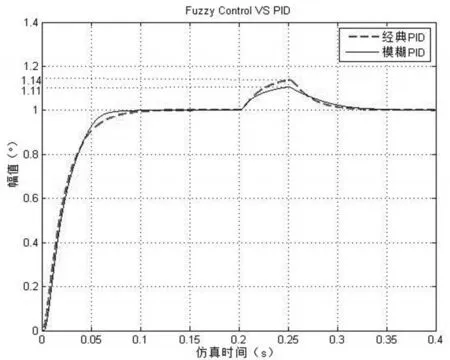
图8 模糊PID和经典PID系统在脉冲信号干扰下的阶跃响应曲线图
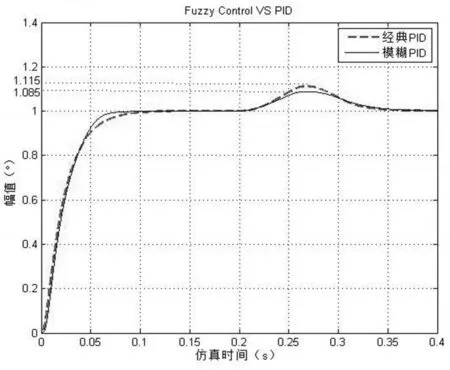
图9 模糊PID和经典PID系统在锯齿波信号干扰下的阶跃响应曲线图
从图8、图9可知,传统PID控制、模糊PID控制方法的初始响应曲线基本重合。这是由于系统在达到稳态前由于偏差较大,系统通过输出最大控制量来提高系统响应速度。但是,在系统将要达到稳态和在受到非线性干扰时,这两种控制系统的曲线变化则比较大。
在采用PID控制时,达到稳定时响应时间为0.12s。另外当系统受到非线性脉冲信号干扰时,靶板倾角的波动量为0.14°,在锯齿波信号干扰下,靶板倾角的波动量为0.115°。
在采用模糊PID控制时,达到稳定时响应时间为0.08s,相比经典PID控制减少约33.3%。在非线性脉冲信号干扰下,靶板倾角的波动量为0.11°,相比经典PID控制减小了约21.4%;在锯齿波信号干扰下,靶板倾角的波动量减小到0.085°,相比经典PID控制减小了约26%。
该仿真模型的单位阶跃信号与实际控制系统中设定的靶板与地面保持90°倾角信号具有很大的近似度。仿真结果表明本文提出的靶板的横摇调节系统可提高系统动态响应能力,并具有较强的抵抗非线性干扰的能力。
4 结论
(1)针对靶车设计了基于模糊PID控制的靶板调节系统,确定了模糊控制规则和隶属度关系,并进行去模糊化处理,使控制系统得到不断优化。
(2)在MATLAB/Simulink模块中建立控制系统系统模型并进行模拟仿真,得出了在非线性干扰下系统的阶跃响应对比图,结果表明,本文设计的模糊PID控制系统具有较好的鲁棒性和较强的抵抗非线性干扰的能力。
[1]刘溧,耿聪,陈慧岩,等.遥控驾驶靶车牵引车的速度控制[J].兵工学报,2004,25(3):318-321.
[2]吴卫国.选煤厂浓缩池自动加药控制系统的设计与实现[D].长春:吉林大学,2016.
[3]陶平,吴洪明,唐文,等.侧面叉车线控液压转向系统的设计与仿真[J].制造业自动化,2017,39(6):23-26.
[4]王春生,侯云海,刘凡.采用模糊控制的垂直型旋转式倒立摆系统[J].长春理工大学学报:自然科学版,2011,34(02):77-79.
[5]李少华.遥感平台卫星运输包装箱温度控制方法研究[D].哈尔滨:哈尔滨工业大学,2007.
[6]黄卫华.模糊控制系统及应用[M].北京:电子工业出版社,2012.
[7]Zakaria Baroud,Mohammed Benmiloud,Atallah Benalia,et al.Novel hybrid fuzzy-PID control scheme for air supply in PEM fuel-cell-based systems[J].InternationalJournalofHydrogen Energy,2017,42(15):1014-1017.
[8]高峰,王媛,李艳,等.固着磨料双面研磨压力模糊自整定PID控制方法研究[J].中国机械工程,2015,(2):162-166.
猜你喜欢
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
高压物理学报(2020年6期)2020-12-01
兵器装备工程学报(2020年10期)2020-11-05
兵器装备工程学报(2019年7期)2019-08-13
兵器装备工程学报(2019年6期)2019-07-05
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22