自动驾驶汽车安全自适应巡航控制
2018-03-29 07:15
汽车文摘 2018年3期
本文以舒适和安全的方式解决跟车时车辆加速度变化的问题。本文所提出的自适应巡航控制框架有两部分组成,一个是预测控制模型,一个是安全控制模型,控制框架图如图一所示。预测控制模型总是试图与前车保持一定的安全距离,可是由于前车的运行状态是不确定的,它可能会与预测模型所预测的前车行驶速度不同,因此预测模型并不能保证它所保持的安全距离是绝对安全的。我们使用经过实验验证的安全控制器来解决这个问题,通过预测控制模型和安全控制模型之间的切换确保行车安全。预测控制模型基于MPC,计算最佳输入,以保证安全距离。然而,大多数时候,保持安全距离和改善交通流量的目标是相互矛盾的要求。当前车出现紧急制动时,或者出现紧急情况时,自动巡航系统就会启动完全制动模式,以尽可能地减少碰撞发生的可能性。
本文还使用实车数据对本文所提出的控制框架进行验证,结果表明,在汽车保证安全与舒适性的同时,汽车在跟车时可以保持在与前车合适距离外,也可以保证保持一个合适的速度,控制的整体效果较好。所提出的方法保证了配备ACC的车辆的安全性和舒适性,可以完全接管驾驶任务。
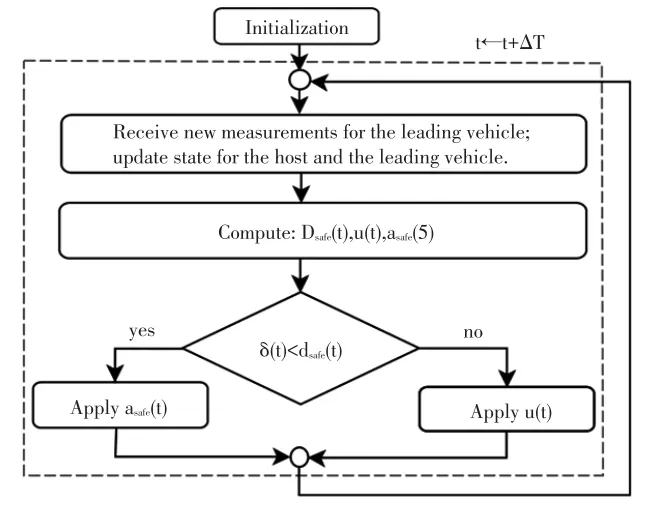
图一 自适应巡航控制的控制框架图
猜你喜欢
航天返回与遥感(2022年3期)2022-07-07
福建轻纺(2022年4期)2022-06-01
房地产导刊(2022年5期)2022-06-01
中国典型病例大全(2022年9期)2022-04-19
载人航天(2021年5期)2021-11-20
现代仪器与医疗(2021年2期)2021-07-21
建材发展导向(2021年7期)2021-07-16
环球市场(2020年5期)2020-09-10
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14