串联倒摆的空气弹簧隔振器中倒摆的稳定性分析
2018-03-28 07:20:42徐登峰管高峰穆海华
振动与冲击 2018年6期
朱 煜, 喻 强, 徐登峰, 管高峰, 穆海华
(1. 电子科技大学 机械电子工程学院,成都 611731;2. 清华大学 机械工程系,北京 100084)
倒立的摆动装置(倒摆)因其结构简单、成本低廉等特点被广泛应用于自动控制工程、机械工程等领域的各种设备中。Blitzer等[1-2]在1965年分别利用牛顿力学法和拉格朗日方程法建立了倒摆的运动方程,并分析了正弦激励作用时倒摆的运动特性。Kalmus[3]在1970年分析了脉冲激励作用时倒摆的运动特性。Pinoli等[4-5]分别在1993年和1994年开始提出倒摆可用于水平隔振装置中。但倒摆作为一种负刚度隔振系统单独使用时极不稳定,必须联合其它装置一起使用。Losurdo等[6-9]相继提出倒摆可联合金属弹簧、铍青铜片、高强度挠性关节、复合摆等一起使用,用于各种精密隔振系统中。
近年来,倒摆联合空气弹簧使用逐渐成为研究热点[10-15]。空气弹簧具有较低的垂直刚度和较大的水平刚度,倒摆具有较低的水平刚度和较大的垂直刚度,将倒摆与空气弹簧串联使用时,倒摆的水平刚度远小于空气弹簧的水平刚度而垂直刚度远大于空气弹簧的垂直刚度,串联使用后的隔振器等效水平刚度近似为倒摆的水平刚度,等效垂直刚度近似为空气弹簧的垂直刚度。因此,倒摆串联空气弹簧使用不仅解决了倒摆单独使用时极不稳定的问题,还解决了空气弹簧垂直和水平方向的隔振性能无法兼顾的问题,使隔振器垂直和水平方向同时实现了低刚度(低固有频率)。
虽然串联倒摆的空气弹簧隔振器具有上述的诸多优点,但在使用过程中依然会出现倒摆稳定性问题。该稳定性问题主要是指倒摆偏离初始平衡位置后无法回复到原来的位置或回复时间过长。文献[16-18]中提到单摆在偏离初始平衡位置一个较小的角度后会受到一个指向平衡位置,大小与位移成正比的回复力的作用,从而使单摆能够回复到原来的位置。倒摆作为一个倒立的单摆,串联空气弹簧后在水平外力作用下,会产生水平位移和偏转(活塞偏转),同时也会受到空气弹簧给予的回复力和回复力矩(回复力产生的矩)作用。回复力和回复力矩的大小和方向决定着倒摆能否回复到原来的位置。所以,以回复力和回复力矩的大小和方向来衡量倒摆的稳定性。
为此,本文从串联倒摆的空气弹簧隔振器各个结构参数出发,分析其对倒摆稳定性的影响,利用牛顿力学法建立倒摆稳定性的力学模型,推导出回复力和回复力矩的数学模型,再结合具体实例对该数学模型进行仿真分析,寻找影响倒摆稳定性的主要结构参数,最后根据仿真分析结果指导空气弹簧隔振器的结构优化设计。
1 理论分析
如图1所示,串联倒摆的空气弹簧隔振器主要由负载、摆杆、上活塞、橡胶膜片、下活塞、压环、腔室和空气弹簧等组成。外力作用下,摆杆会移动到图中竖直双点划线所示位置,上下活塞也会绕着下活塞与摆杆的接触点偏转至图中双点划线矩形所示位置,橡胶膜片由图中黑色粗实线变成双点划线所示位置。如点划线圆所示,左侧橡胶膜片与活塞的接触面积变大,右侧橡胶膜片与活塞的接触面积变小,在空气弹簧内部气压的作用下活塞(摆杆和负载)因受到回复力和回复力矩作用而回复到原来的初始平衡位置。
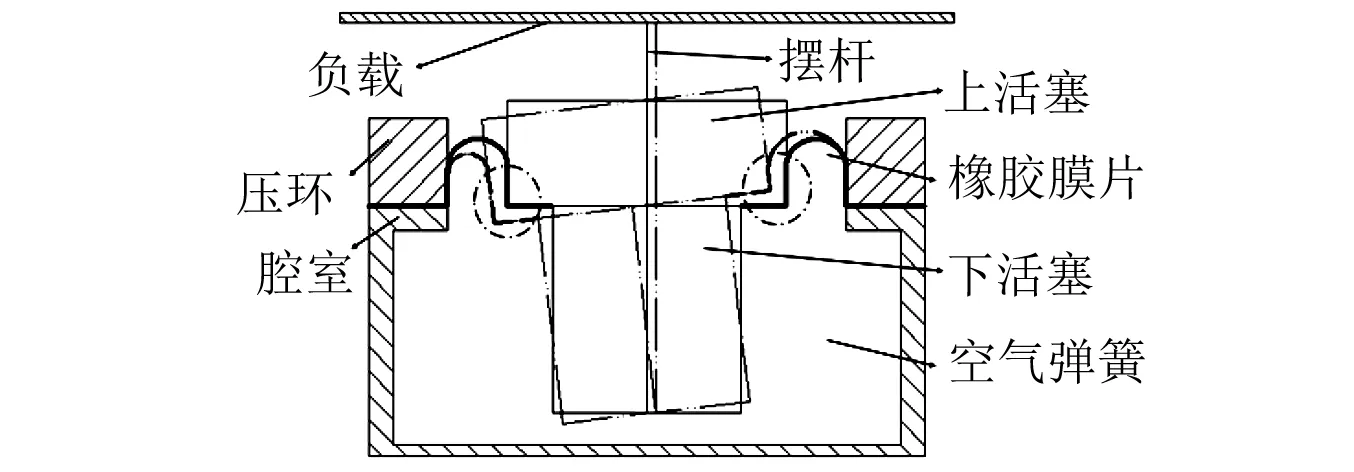
图1 串联倒摆的空气弹簧隔振器示意图Fig.1 The air spring vibration isolator in series with the inverted pendulum
如图2所示,活塞的重心为O2,活塞与摆杆的接触点为O1,F11和F12分别为活塞受到垂直于上活塞外表面的压力,F21和F22分别为活塞受到沿着上活塞外表面向上的拉力,Fp为空气弹簧内部气体对活塞的有效支撑力,mg为活塞的重力,Mg为负载等对活塞的压力。各力的合力就是活塞受到的回复力F,各力在O1点产生的合力矩就是活塞受到的回复力矩T。橡胶膜片与活塞接触面积的变化以及空气弹簧内部气压的存在是回复力和回复力矩产生的主要原因,先分析橡胶膜片与活塞接触面积的变化和空气弹簧内部气体压力的大小,再逐个分析图2中各力的大小和方向以及在O1产生力矩的大小和方向,便可得到总的回复力F和回复力矩T。
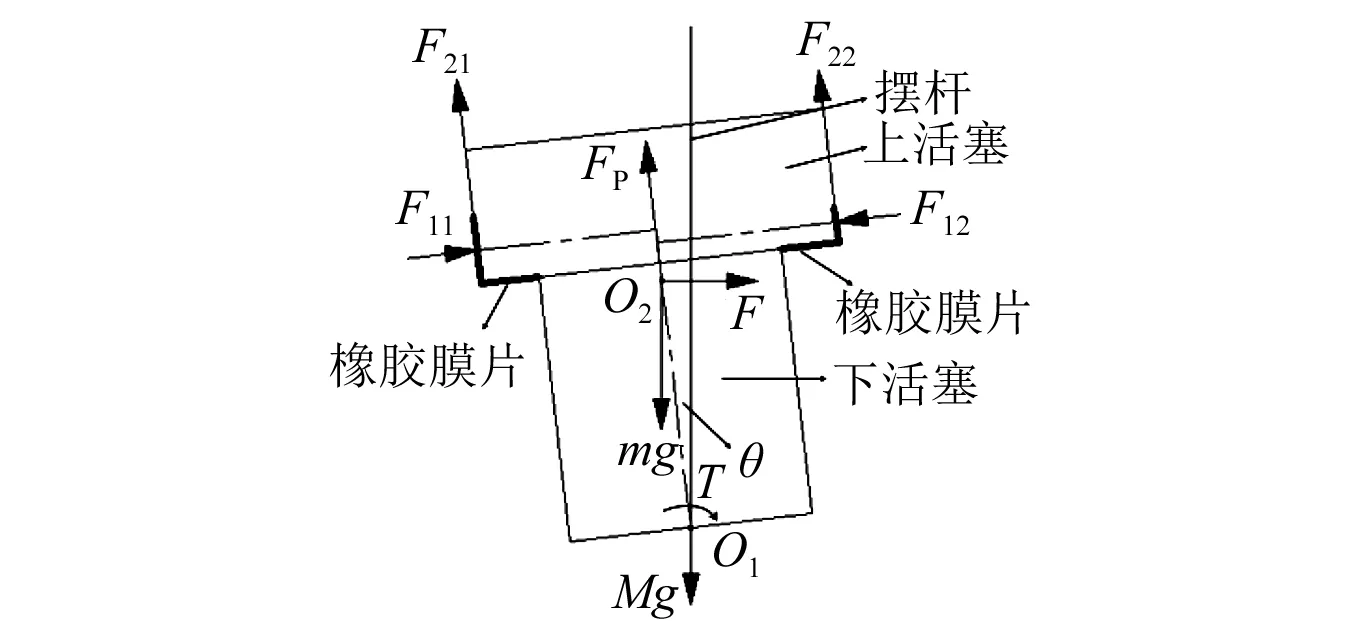
图2 活塞的受力分析Fig.2 The force analysis of the piston
1.1 橡胶膜片与活塞接触面积的变化
将橡胶膜片与活塞的接触面沿着活塞周向划分成无数个小段,每个小段的高度即为该段对应的橡胶膜片与活塞接触的长度。活塞发生如图1所示的偏转后,橡胶膜片与活塞最左侧边线的接触长度最长,与活塞最右侧边线的接触长度最短。橡胶膜片与活塞接触面每个小段的高度近似认为是从最右侧最短接触长度线性增加到最左侧最长接触长度,则求解橡胶膜片与活塞接触面积的变化就相当于求解橡胶膜片与活塞的最长接触长度和最短接触长度。
如图3所示,活塞由实线DMNH偏转至双点划线D1M1N1H1,O为MN的中点,O1为M1N1的中点。设负载(摆杆)的水平位移为x,上活塞半径为R,摆杆有效摆长为h,活塞偏转角度为θ。则D和D1之间的水平距离Δx1和竖直距离Δy1以及H和H1之间的水平距离Δx2和竖直距离Δy2分别为
Δx1=hsinθ+Rcosθ-R-x
(1)
(2)
Δx2=hsinθ-Rcosθ+R-x
(3)
(4)
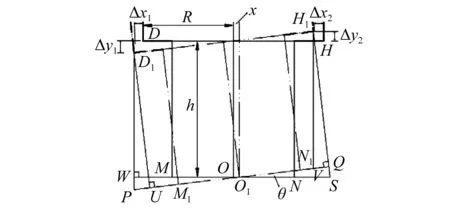
图3 活塞偏转示意图Fig.3 The deflection of the piston
如图4(a)所示,左侧橡胶膜片由ABCD变为A1B1C1D1,橡胶膜片与上活塞的接触长度由CD变为C1D1,设圆弧BC的半径为r(包含橡胶膜片厚度),圆弧B1C1的半径为R1。橡胶膜片中帘布的存在使其无法被拉伸或压缩而改变长度,则为

(5)
式(5)中∑为定值,则可得到R1为
(6)
则橡胶膜片与活塞的最长接触长度L为
(7)
如图4(b)所示,右侧橡胶膜片由EFGH变为E1F1G1H1,橡胶膜片与活塞的接触长度由GH变为G1H1,设圆弧F1G1的半径为R2。同理,可得R2为
(8)
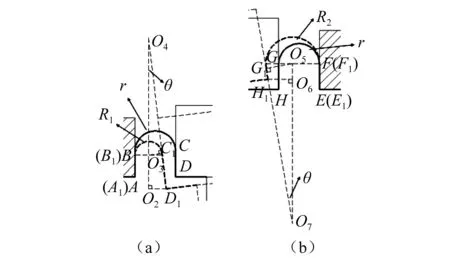
图4 橡胶膜片变形示意图Fig.4 The deformation of the elastomer diaphragm
则橡胶膜片与活塞的最短接触长度l为
(9)
1.2 空气弹簧内部压强的计算

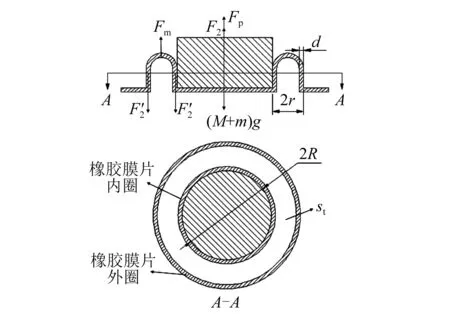
图5 橡胶膜片与负载受力示意图Fig.5 The force of the elastomer diaphragm and the load
由橡胶膜片的受力分析可知
(10)
空气弹簧内部气体对负载的有效支撑力Fp为
Fp=π(P1-P0)(R+d)2
(11)
由负载的受力分析可知
(M+m)g=F2+Fp
(12)
则空气弹簧内部气体压力P1为
(13)
1.3 F11和F12产生的回复力和回复力矩
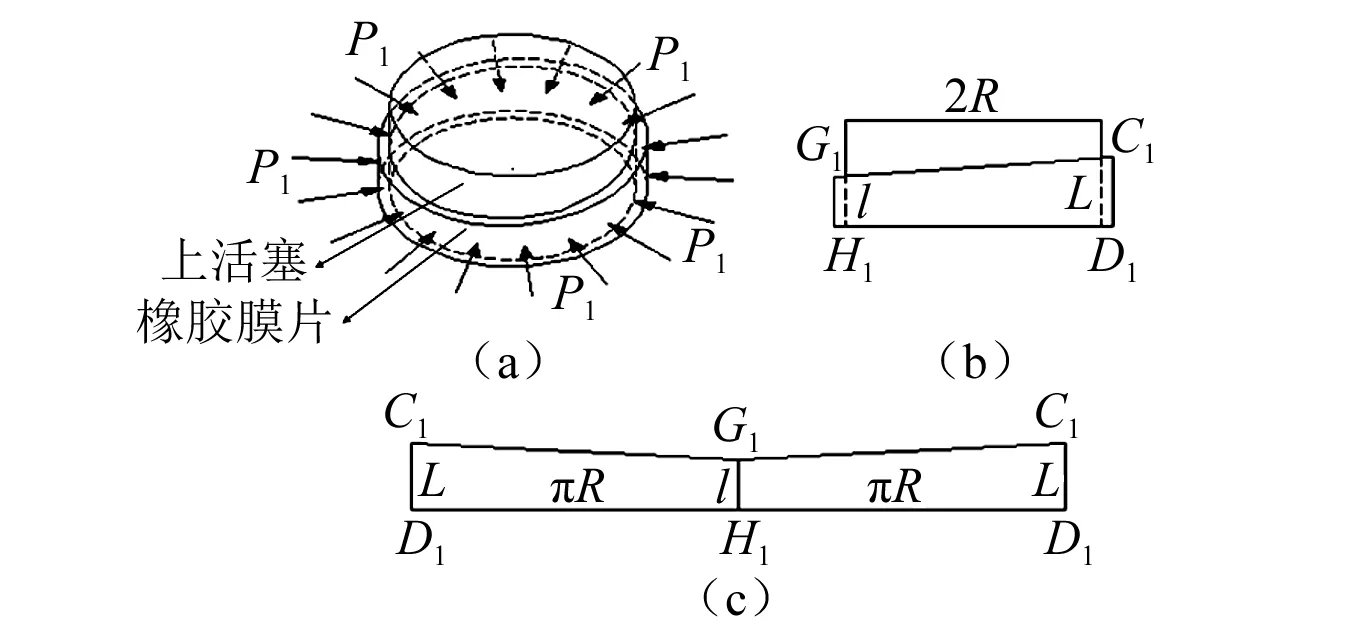
图6 橡胶膜片与上活塞接触示意图Fig.6 The contact between elastomer diaphragm and upper piston
偏转后的橡胶膜片与上活塞轴测图如图6(a)所示,主视图如图6(b)所示,橡胶膜片与上活塞的最长接触长度C1D1为L,最短接触长度G1H1为l。将圆环状的橡胶膜片展开成如图6(c)所示的平面状,橡胶膜片与上活塞的接触长度近似从G1H1处的l不断线性增加到C1D1处的L,H1D1之间的长度为πR。
如图7(a)所示,取一小段橡胶膜片MN,其与H1的夹角为α,对应的圆心角为dα。如图7(b)所示,橡胶膜片MN受到垂直于其外表面的力dF,将该力正交分解成平行于H1D1的分力dF1和垂直于H1D1的分力dF3。将图7(c)半圆弧H1ND1展开成图7(d)的线段H1ND1,则线段MN的长度为
(14)
则作用在橡胶膜片MN的外表面的力dF为
(15)
如图7所示,所有dF3的合力为零,dF1大小为
dF1=cosαdF
(16)
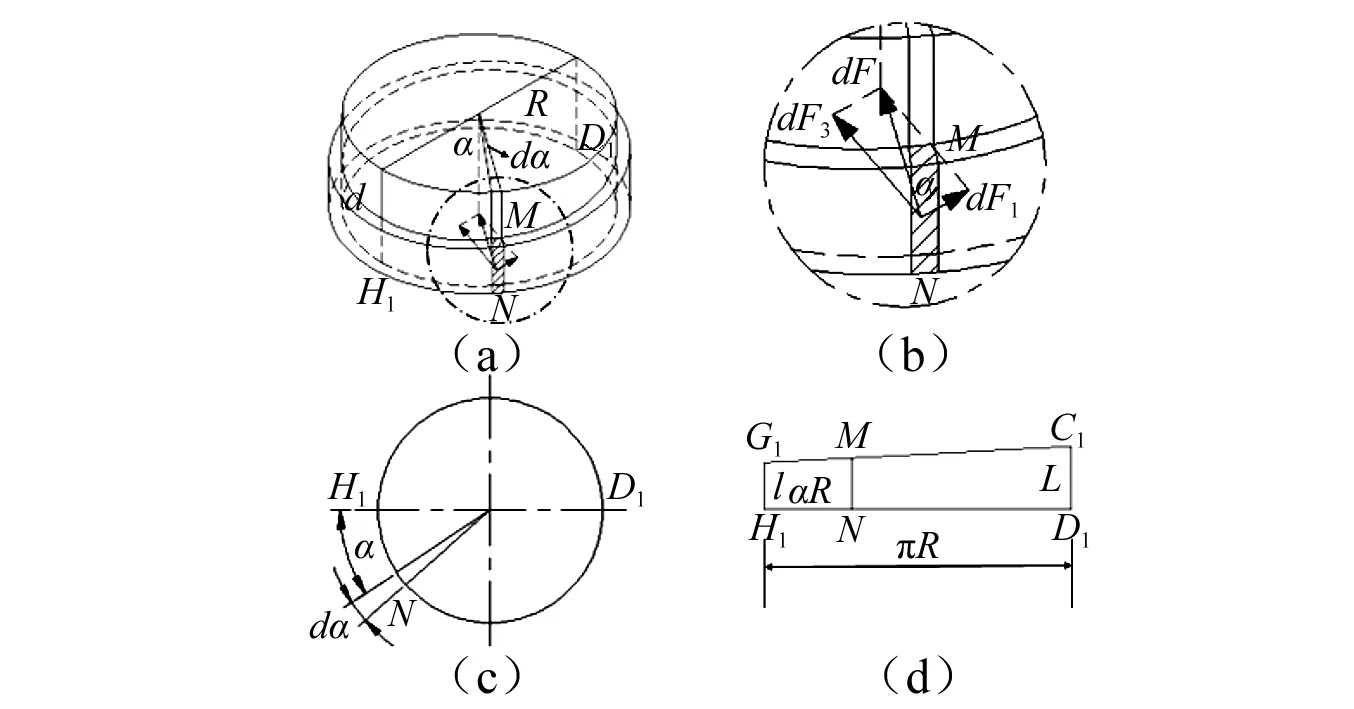
图7 小段橡胶膜片“MN”Fig.7 A small part of the elastomer diaphragm “MN”
如图8所示,记左侧橡胶膜片所受到的所有分力dF1的合力为F11,其对点O1产生的有效力矩为T11;右侧橡胶膜片所受到的所有分力dF1的合力为F12,其对点O1产生的有效力矩为T12,则F11、F12、T11和T12大小分别为(方向如图8所示)
(17)
(18)
(19)
则合力F1和合力矩T1大小为(方向如图8所示)
(20)
(21)
图8 偏转力矩T1示意图Fig.8 The deflection torque T1
1.4 F21和F22产生的回复力和回复力矩
如图9(a)所示,近似认为活塞偏转后最左侧橡胶膜片鼓起部分为直径2R1的圆弧,最右侧橡胶膜片鼓起部分为直径2R2的圆弧。图9(b)为橡胶膜片与活塞的轴测图,图9(c)为橡胶膜片与活塞的截面图,取一小段橡胶膜片AB,其有效的投影面为CD,与水平轴线的夹角为β,对应的圆心角为dβ。橡胶膜片鼓起部分的有效投影面的长度近似认为是从2R1线性增加到2R2,则CD的长度为
(22)
则该段橡胶膜片对上活塞的拉力dF2为
(23)
图9 小段橡胶膜片“AB”Fig.9 A small part of the elastomer diaphragm “AB”
如图10(a)所示,记左侧橡胶膜片对上活塞的所有拉力dF2的合力为F21,其对点O1产生的有效力矩为T21;右侧橡胶膜片对上活塞的所有拉力dF2的合力为F22,其对点O1产生的有效力矩为T22,则F21、F22、T21和T22大小分别为(方向如图10(a)所示)
(24)
(25)
(26)
则合力F2和合力矩T2大小为(方向如图10所示)

(27)
T2=T21-T22=
(28)
1.5 活塞重力产生的回复力矩
设活塞的重心高度为h1,则重力mg对点O1产生的力矩T3大小为(方向如图10(b)所示)
T3=mgh1sinθ
(29)
图10 偏转力矩T2、T3和T示意图Fig.10 The deflection torque T2,T3 and T
1.6 总回复力和回复力矩
综上所述,总回复力F和总回复力矩T的大小为(方向如图10(b)所示)

(30)

(31)
2 实例分析
某串联倒摆的空气弹簧隔振器实例如图11所示,其各项参数值如表1所示。
图11 空气弹簧隔振器实例Fig.11 The actual air spring vibration isolator
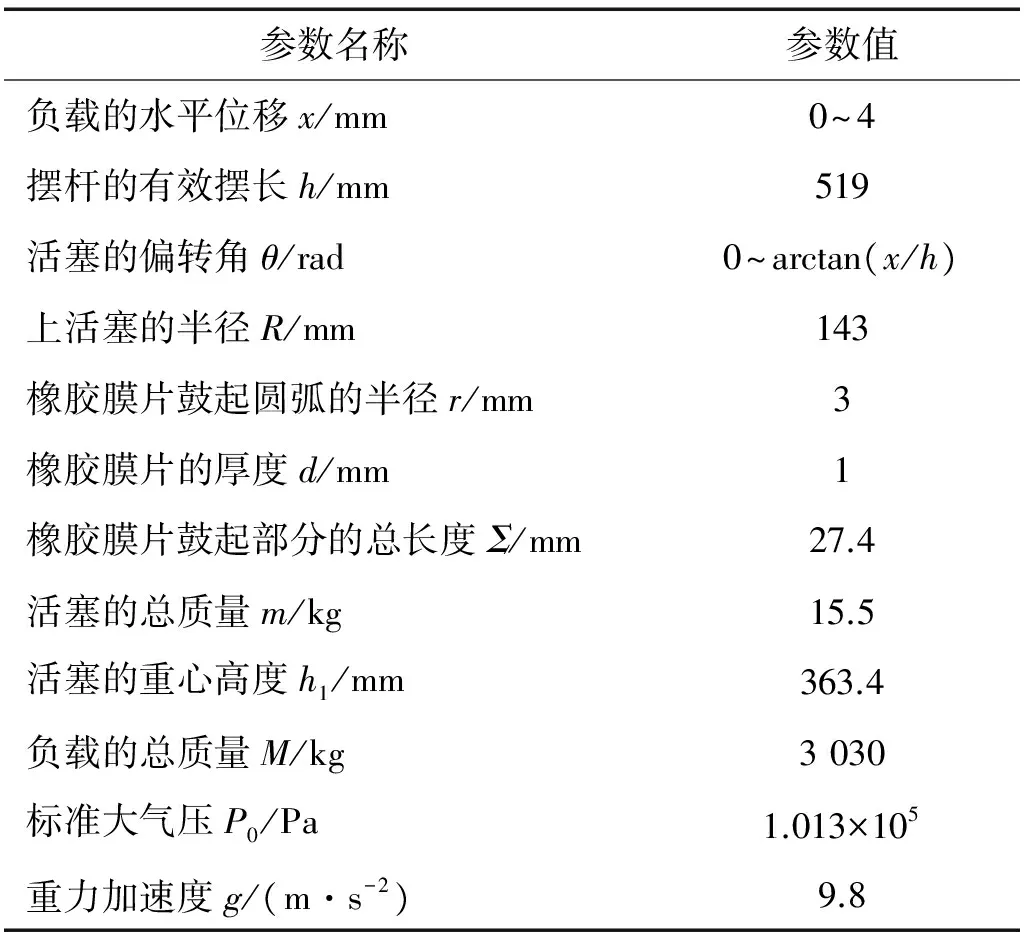
参数名称参数值负载的水平位移x/mm0~4摆杆的有效摆长h/mm519活塞的偏转角θ/rad0~arctan(x/h)上活塞的半径R/mm143橡胶膜片鼓起圆弧的半径r/mm3橡胶膜片的厚度d/mm1橡胶膜片鼓起部分的总长度Σ/mm27.4活塞的总质量m/kg15.5活塞的重心高度h1/mm363.4负载的总质量M/kg3030标准大气压P0/Pa1.013×105重力加速度g/(m·s-2)9.8
将上述参数代入式(30)中,回复力F与水平位移x和偏转角θ的关系如图12(a)所示,回复力F均为负值,其绝对值表示回复力F的大小,负号表示回复力F的方向总是与负载水平位移x的方向相反。随着水平位移x的增大,回复力F的大小不断增大,随着活塞偏转角度θ的增大,回复力F的大小不断减小。
将上述参数代入式(31)中,回复力矩T与水平位移x和偏转角θ的关系如图12(b)所示,回复力矩T绝对值表示回复力矩T的大小。随着水平位移x的增大,回复力矩T的大小不断增大,随着活塞偏转角度θ的增大,回复力矩T的大小先不断减小后不断增加。
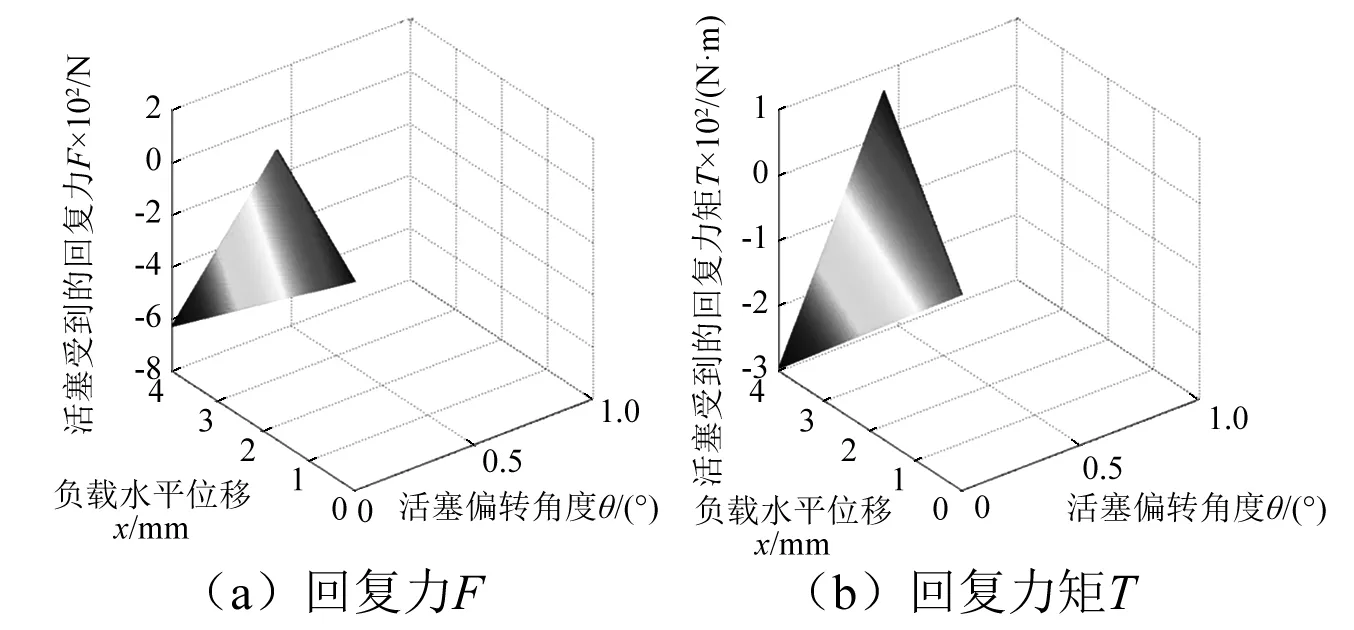
图12 回复力F和回复力矩T与水平位移x和偏转角θ的关系Fig.12 The relationship between the restoring force F, the restoring torque T and the displacement x, the angle θ
3 仿真分析
倒摆稳定性主要取决于回复力F和回复力矩T的大小和方向,负载质量、活塞质量和重心高度等一定时,它们主要与摆杆摆长h、上活塞半径R、橡胶膜片鼓起圆弧半径r和橡胶膜片厚度d有关。下面分别分析这些参数变化对回复力F和回复力矩T大小和方向的影响。
3.1 摆杆摆长h对回复力F和回复力矩T的影响
如图13所示,分别取不同的摆杆摆长h′,观察回复力F和回复力矩T的变化。随着摆杆摆长h的减小,回复力F的大小有所增加,加速活塞偏转的力矩T大小有所降低。
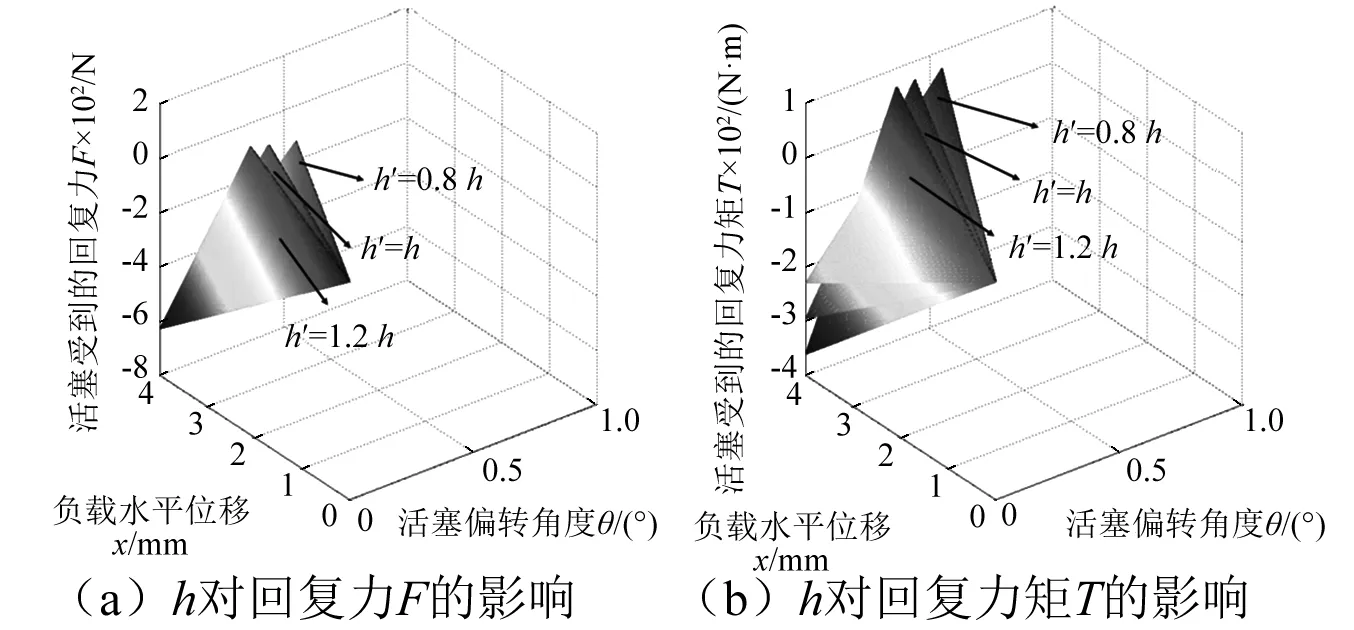
图13 摆杆摆长h的变化对回复力F和回复力矩T的影响Fig.13 The influence of the length h on the restoring force F and the restoring torque T
3.2 上活塞半径R对回复力F和回复力矩T的影响
如图14所示,分别取不同的上活塞半径R′,观察回复力F和回复力矩T的变化。随着上活塞半径R的减小,回复力F的大小有所增加,但加速活塞偏转的力矩T大小也有所增加。
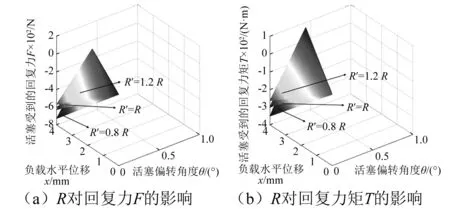
图14 上活塞半径R的变化对回复力F和回复力矩T的影响Fig.14 The influence of the radius R on the restoring force F and the restoring torque T
3.3 圆弧半径r对回复力F和回复力矩T的影响
如图15所示,分别取不同的橡胶膜片鼓起圆弧半径r′,观察回复力F和回复力矩T的变化。圆弧半径r的变化对回复力F和回复力矩T的影响忽略不计。
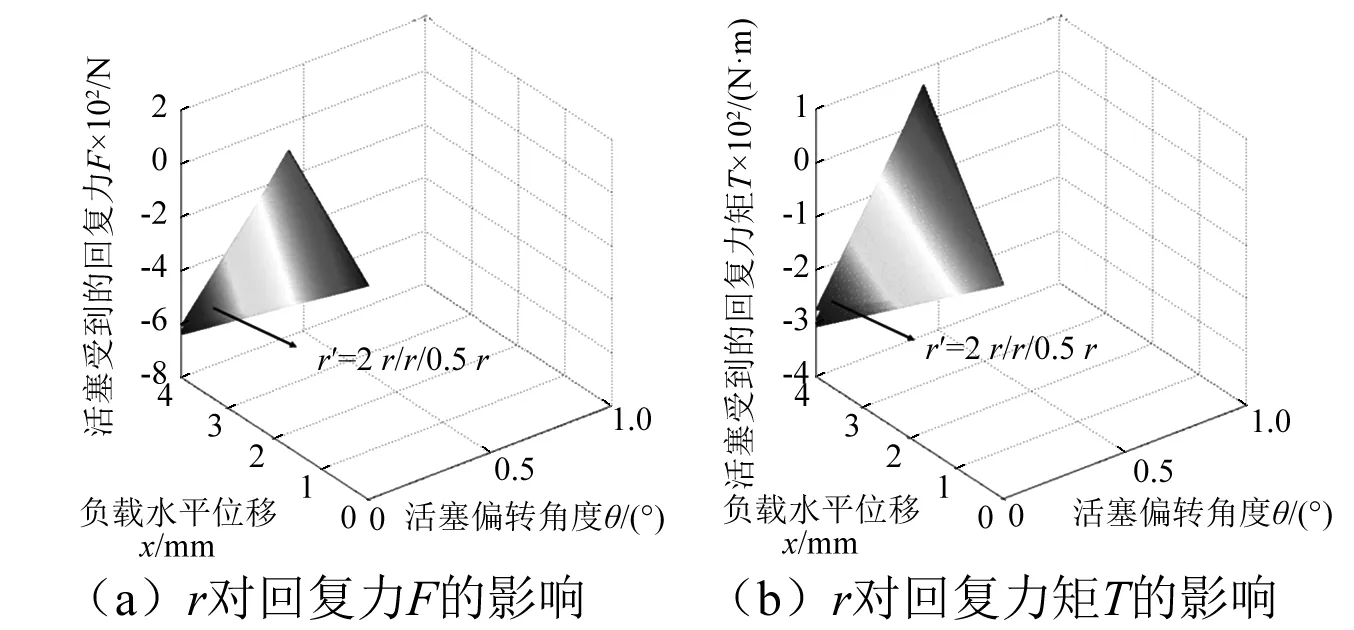
图15 圆弧半径r的变化对回复力F和回复力矩T的影响Fig.15 The influence of the arc radius r on the restoring force F and the restoring torque T
3.4 橡胶膜片厚度d对回复力F和回复力矩T的影响
如图16所示,分别取不同的橡胶膜片厚度d′,观察回复力F和回复力矩T的变化。橡胶膜片厚度d的变化对回复力F和回复力矩T的影响忽略不计。
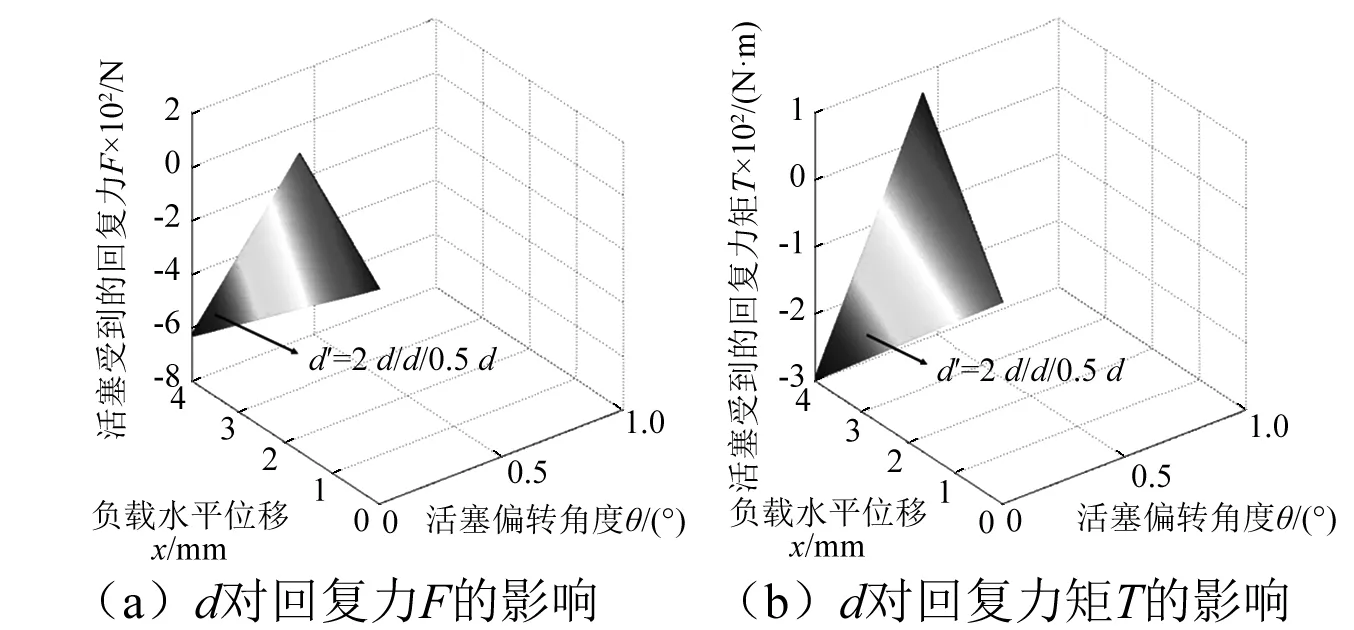
图16 橡胶膜片厚度d的变化对回复力F和回复力矩T的影响Fig.16 The influence of the thickness d of the elastomer diaphragmon the restoring force F and the restoring torque T
4 结构优化设计
综上所述,为了增加倒摆的稳定性,可以从以下方面进行结构优化设计:
(1)适当减小倒摆摆长h。串联倒摆的空气弹簧隔振器为了获得更好的水平方向隔振性能只有采用较长的摆杆杆长h,这样会降低倒摆的稳定性。因此,为了增加倒摆的稳定性,在隔振器的具体设计时必须适当减小摆杆摆长h。一方面可以增加回复力的大小,使负载、活塞和摆杆等的水平位移能更快地减小;另一方面也可以降低加速活塞偏转的力矩大小,使每个水平位移对应的活塞偏转角度有所降低。
(2)适当减小上活塞半径R。在空气弹簧内部气体压力有限的前提下,串联倒摆的空气弹簧隔振器为了追求更大的承载能力只有采用较大上活塞的半径R,这样也会降低倒摆的稳定性。因此,为了增加倒摆的稳定性,在隔振器的具体设计时必须牺牲承载能力而适当减小活塞半径R。这样可以增加回复力的大小,使负载、活塞和摆杆等的水平位移能更快地减小,虽然也会增加加速活塞偏转的力矩大小,但增加了回复力的大小更为重要。
(3)降低负载的重心高度。负载一定的情况下,负载在活塞转动支点处的转动惯量与其重心高度的平方成正比,降低负载的重心高度可减小负载转动惯量的大小,从而使负载、活塞和倒摆在初始平衡位置处更加稳定。
5 结 论
本文全面分析了空气弹簧隔振器各个结构参数对倒摆稳定性的影响,得到了回复力和回复力矩的数学模型,通过对该模型进行实例和仿真分析发现回复力和回复力矩主要与倒摆摆长h和上活塞半径R有关。一方面,可适当减小倒摆摆长和上活塞半径来增加回复力的大小,增强倒摆的稳定性;另一方面,可适当降低负载的重心高度来降低负载在活塞转动支点处的转动惯量大小,使倒摆在平衡位置处更加稳定。
[ 1 ] BLITZER L. Inverted pendulum[J]. American Journal of Physics, 1965(33): 1076-1078.
[ 2 ] PHELPS F M Ш, HUNTER J H Jr. An analytical solution of the inverted pendulum[J]. American Journal of Physics, 1965(33): 285-295.
[ 3 ] KALMUS H P. The inverted pendulum[J]. American Journal of Physics, 1970(38): 874-878.
[ 4 ] PINOLI M, BLAIR D G, JU L. Tests on a low-frequency inverted pendulum system[J]. Measurement Science and Technology, 1993,4(9): 995-999.
[ 5 ] SAULSON P R, STEBBINS R T, DUMONT F D, et al. The inverted pendulum as a probe of anelasticity[J]. Review of Scientific Instruments, 1994, 65(1): 182-191.
[ 6 ] LOSURDO G, BERNARDINI M, BRACCINI S, et al. An inverted pendulum preisolator stage for the VIRGO susoension system[J]. Review of Scientific Instruments, 1999, 70(5): 2507-2515.
[ 7 ] YAGMUR L, GULMEZ T, HACIZADE F, et al. A new inverted pendulum to determine anelastic behavior of metals: design and characterization[J]. Review of Scientific Instruments, 2005, 76(9): 093903.
[ 8 ] TAKAMORI A, RAFFAI P, MARKA S, et al. Inverted pendulum as low-frequency pre-isolation for advanced gravitational wave detectors[J]. Nuclear Instruments and Methods in Physics Research A, 2007, 582(2): 683-692.
[ 9 ] 夏超,谭久彬. 基于复合摆倒摆串联的光学仪器气浮隔振方法研究[J]. 光电子激光,2011,22(10): 1551-1556.
XIA Chao, TAN Jiubin. An air flotation vibration isolation method based on compond pendulum inverted pendulum-series for optical instruments[J]. Journal of Optoelectronics Laser, 2011, 22(10): 1551-1556.
[10] WATSON D C, PHILLIPS A H. Vibration isolator with low lateral stiffness: US6953109B2 [P]. United States Patent, 2005.
[11] BUTLER H, AUER F, VAN M, et al. Support device and lightographic apparatus : US7170582B2 [P]. United States Patent, 2007.
[12] 朱继梅,俞宁长,邹岳华. 倒摆式气动隔振器:CN1487216A [P]. 2004.
[13] 谭久彬,夏朝,王雷,等. 基于球头连杆的气浮式正倒摆串联机构的空气弹簧隔振器:CN102072275 [P]. 2011.
[14] 杨润,姜伟,朱襟成. 精密减振-定位复合系统建模与分析[J]. 机械与电子,2013(6): 57-61.
YANG Run, JIANG Wei, ZHU Jincheng. Modeling and analysis of precision positioning and vibration isolation system[J]. Machinery & Electronics, 2013(6): 57-61.
[15] ARNDT E, OESTRICH W. Vibration isolator with pneumatic spring: US2016/0084339A1 [P]. United States Patent, 2016.
[16] 季文美,方同,陈松淇. 机械振动[M]. 北京:科学出版社,1985.
[17] 王亚民. 大学物理[M]. 西安:西北工业大学出版社,2011.
[18] 蒲华燕. 超精密隔振系统建模与控制方法研究[D]. 武汉:华中科技大学,2012.
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05 06:39:56
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
故事作文·低年级(2023年12期)2023-03-24 14:16:52
煤气与热力(2021年10期)2021-12-02 05:11:48
装备制造技术(2021年5期)2021-08-14 01:44:44
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
现代机械(2018年5期)2018-11-13 10:06:16
航天制造技术(2018年3期)2018-07-07 02:03:18
光学精密工程(2016年5期)2016-11-07 09:06:02