
大幅宽喷杆式喷雾机结构形式分析
2018-03-28 00:49:55李永奎张丽君
农机化研究 2018年3期
宋 云,李永奎,张丽君,李 芳
(沈阳农业大学 工程学院, 沈阳 110161)
0 引言
随着土地经营模式的改变,劳动强度大、工作效率低的手动式喷雾器逐步被机动喷雾机替代,植保机械开始向自动化方向发展。目前,宽幅度农业机械需求量越来越大,特别是不需要大功率的宽幅度喷杆式喷雾机发展更为迅猛[1]。常用的喷杆式喷雾机都在12m以上,甚至可达42m[2-3]。喷杆式喷雾机具有效率高、作业质量好、污染少及节省劳动力等特点,不仅可以应用于作物的病虫害防治,还可广泛应用于农作物播种前期的土壤土质处理等方面,是一种理想化的大田作业机械[4-6]。
本文综述大幅宽喷杆式喷雾机的结构形式,分析不同结构形式喷雾机的性能特点,试图从机械结构设计角度寻找一种操作结构简单、总体质量小、控制方便的大幅宽喷杆式喷雾机的基本机构,为高度、仰角可调节,并可以折叠的喷杆式喷雾机的设计提供必要的参考。
1 喷雾机喷杆折叠方式及结构
1.1 喷杆折叠方式
一般情况下,当喷杆式喷雾机半边喷幅小于2~3m时,喷杆可以不需要折叠;但由于喷幅较窄,只适用于小面积耕地作业,不能满足农作物大面积作业的需求。当整机的喷杆幅度超过6~7m时,必须采取折叠方式,其优点是不工作时能够方便喷雾机运输,防止喷杆末端被障碍物刮碰,避免喷杆折损[7]。
喷杆式喷雾机的喷杆通常可分为不可折叠、水平折叠、立式折叠、两侧折叠及伸缩5种形式。喷杆水平和立式折叠方式是将折叠后的喷杆放置在机车尾部。水平折叠方式采用2个关节对喷杆进行折叠支撑,实物图如图1所示。立式折叠方式通常采用1个关节对喷杆进行折叠支撑,实物图如图2所示。两侧折叠方式是将折叠后的喷杆放置在机车两侧,采用4关节对喷杆进行折叠支撑,实物图如图3所示。喷杆伸缩折叠形式一般不需要采用关节铰接设计。喷杆折叠后能够减少喷杆横向所占的面积,方便道路运输和放入仓库保存。立式折叠方式一般会增加整机的高度,致使喷雾机道路运输的通过性相对较差,伸缩折叠会增加整机设计和操控的难度,水平折叠和两侧折叠的整机运输通过性相对较好,目前这类机型使用较多。
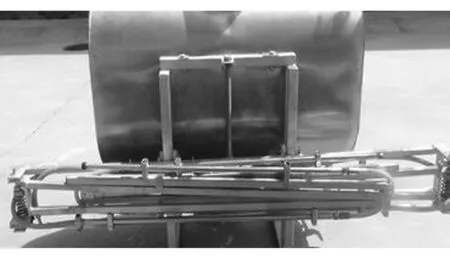
图1 喷杆水平折叠方式Fig.1 The level folding way of boom
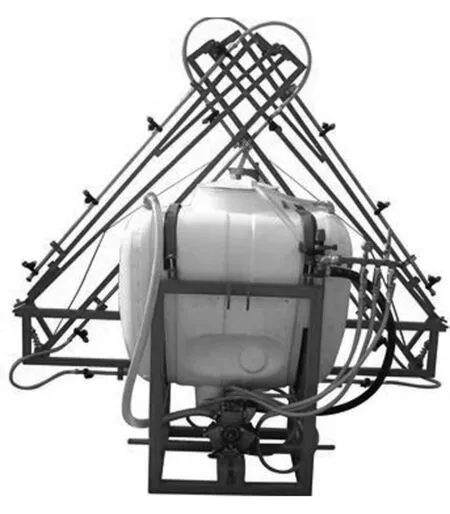
图2 喷杆立式折叠方式Fig.2 The vertical folding way of boom

图3 喷杆两侧折叠方式Fig.3 The bilateral folding way of boom
1.2 喷杆结构
目前,喷杆式喷雾机的喷杆主要使用普通型钢、铝型材、玻璃钢、普通塑料等材料。材料对喷杆的力学性能和使用寿命有显著影响。
喷杆材料采用普通型钢,其塑形和韧性好,钢结构更接近于匀质和各向同性,制造简便、价格便宜;缺点主要是容易失稳,质量较大且不耐腐蚀[8]。铝型材比常用金属的密度小,质量更轻且可塑性更强,生产性和化学性能较好,有很强的耐腐蚀性,没有污染和毒性;但弹性模量低、抗疲劳性差[9]。玻璃钢是一种纤维强化塑料,具有轻质高强,工艺性能优良,可设计性好、耐腐蚀等优点;缺点主要是容易老化,弹性模量低,及耐温性差[10]。普通塑料的质量较轻,加工特性好,强度大;但易老化、刚度小[11]。
喷杆式喷雾机的喷杆主要有单杆、桁架和斜拉悬吊等结构形式。喷杆作业时的弹性变形又与喷杆本身的结构有密切的关系[12-13]。喷杆结构的好坏是直接决定喷杆能否满足不同工况下的作业强度的要求[14]。
单杆结构通常可以是由一个杆件单独组成,也可以是多个杆件铰接或焊接组成。一般成平面直线布置,结构设计相对简单,喷杆质量较轻,操作控制比较方便。喷杆属于弱阻尼的弹性体,单杆结构的刚度较小,抗弯抗扭性能不易控制,容易产生振荡等现象,更容易导致喷杆弹性变形[15]。实物图如图4所示。

图4 单杆结构Fig.4 The truss structure
桁架结构通常由多个喷杆杆件彼此在两端用铰链连接而成的结构,分为平面桁架和空间桁架两种结构。平面桁架喷杆的轴线和所受外力都在同一平面上,实物图如图5所示。

图5 平面桁架结构Fig.5 The square truss structure
空间桁架各喷杆的轴线和所受外力不在同一平面上,实物图如图6所示。喷杆的桁架一般由杆件组成三角形结构或梯形结构[16],这样能充分利用材料自身的强度来承受轴向拉力或压力,以保护喷杆免于弹性变形;幅宽大时还能够减轻喷杆的自重和增加杆件的刚度,因此更适合于大幅宽喷杆式喷雾机。钢结构桁架结构是目前大幅度喷杆式喷雾机主要结构形式

图6 空间桁架结构Fig.6 The space truss structure
斜拉悬吊结构通常由喷杆、拉索和其他辅助结构等组成,实物图如图7所示。该结构可以使喷杆的弯矩减小,受力情况得到明显改善,同时能够降低喷杆的设计强度,减轻自身结构质量,从而节省制作原材料;但喷杆关节处使用拉索、弹簧等柔性件连接,会增加喷杆振动情况,导致喷杆作业时不太稳定[17-18]。

图7 斜拉悬吊结构Fig.7 The cable-stayed suspension structure
2 喷杆式喷雾机控制及调整方式
为了能够满足对不同工况和不同农作物的作业需求,喷杆式喷雾机需要根据实际情况进行控制及调整。其控制及调整方式主要有喷杆折叠伸缩、高度调节及仰角控制等。
2.1 喷杆折叠和伸缩操作
对于喷杆幅宽较小的喷雾机,喷杆通常为单杆结构和简单桁架结构,可以采取不折叠的方式,这样结构相对简单,适合于农村小面积作业,劳动强度相对较低;但不能满足农场大面积作业要求。随着设计技术的不断发展,喷杆式喷雾机的喷杆能够进行折叠伸缩操作来增加喷杆幅度,从而满足田间大范围作业需求。
2.1.1 喷杆折叠操作
喷杆折叠铰接处的结构设计方案有很多,各有优缺点,但都属于机械式传动结构。本文根据喷杆折叠操作的驱动动力元件的不同,将折叠操作形式分成3大类。
1)手工折叠操作。喷杆一般设计为3或5段式,左右喷杆关于中间喷杆对称,喷杆需要人工折叠[19],可以采取水平、立式、两侧等折叠方式。折叠原理是在喷杆铰接处采用弹簧及其辅助折叠结构进行定位折叠。手工折叠操作成本相对较低且结构设计简单,但工作时需要人工在田间完成操作,适用于窄幅喷杆(喷杆完全展开长度不超过8m)及升降高度变化不大的工况[20]。
2)电动推杆折叠操作。电动推杆本身包含电动机和其他机械设备,工作时运用的是电动方式,输入电压通常是12/24V,一般使用拖拉机自带的直流电供电。通过操控驾驶室的开关来控制喷杆长度方向上所布置的电动推杆的推动和收缩,达到喷杆折叠的目的。采用电动推杆进行折叠操作能够降低整机自身质量,节省原材料,并且实现远距离的精准控制[21]。喷杆通常采用斜拉悬吊结构和立式折叠方式。
3) 液压油缸折叠操作。现阶段喷杆的折叠操作通常采用液压系统来进行控制,根据喷杆结构形式的不同,又可以分成以下几种情况。
(1)液压+手工操作:喷杆一般为单杆或者桁架结构,设计为5段式。其中,大臂的铰接处采用液压油缸进行折叠操作,小臂的折叠处采用人工操作,整机能够实现半智能化操作,适合于大幅度的喷杆式喷雾机。当作业范围不大时,喷雾可以分段控制,有时只需要控制喷杆大臂伸展,小臂不需要展开就能满足作业需求[22]。这种操作方式能够降低液压油缸的使用数量及销售成本,增加购买力。
(2)全液压自动操作:对于桁架结构的大幅宽喷杆,采用最多的折叠方式是两侧折叠。喷杆通常是多段式结构,中间喷杆固定,左右喷杆关于中间喷杆对称。在喷杆大臂和小臂铰接处均采用液压油缸进行喷杆折叠操作。其主要分成两次折叠动作,完成折叠操作通常需要使用4个液压油缸,每侧有两个液压油缸分别控制喷杆大臂和小臂的折叠,喷杆大臂先完成90°折叠动作,喷杆小臂跟随大臂完成180°折叠动作[23]。其自动化操作水平相对较高,能节省人力;但控制元件较多,系统复杂,造价高昂。
对于斜拉悬吊结构的大幅宽喷杆,采用最多的是立式折叠方式,一般不采用水平折叠方式,因其设计和操作会相对困难。喷杆通常使用多段式结构,液压油缸通过钢丝绳、绳轮和拉杆等控制两侧喷杆进行折叠与展开操作:当喷杆展开时,斜拉绳一端受到喷杆的拉力,使得原先绕于绳筒上的斜拉绳伸出;当喷杆回收时,斜拉绳会因平面卷形弹簧的弹力作用而绕回绳筒之上,从而实现斜拉钢丝绳的可伸可缩。喷杆的刚性能够进一步提升,但由于使用钢丝绳结构不能可靠地固定关节,喷杆容易颤动。另外,由于结构和空间的原因还可能导致两侧喷杆展开和折叠不同步,对作业有影响。绳轮和钢丝绳容易发生锈蚀,对喷雾机稳定性有显著影响[23-24]。
总之,采用机械式传动结构和液压油缸结合的方式进行喷杆折叠操作能够加强喷杆的平衡和其稳定性,可以全自动化地对喷杆进行折叠操作,机械化水平高,操作方便,安全可靠性高,适合于大、中型喷杆式喷雾机。
2.1.2 喷杆伸缩操作
目前,对喷杆伸缩操作方式的研究还比较少,伸缩操作通常是采用错位原理进行设计。南京林业大学的李振生等[25]提出了两种喷杆伸缩操作方式:一种是由液压系统控制,喷杆的伸缩机构采用多极伸缩气缸进行驱动,可以实现左侧杆与右侧杆同步缩进。虽然喷杆轴线错位设计使左右侧喷杆在对同一直线作物进行喷雾作业时有细微的时间差,但这并不影响作业效果。
除液压系统控制外,还可以使用链式进行伸缩操作。其喷杆的伸缩操作采取链轮机构的驱动控制完成,喷杆与链齿在特定点处通过铰接件相连,靠链的传动来起到导向作用,同时伸缩喷杆与支撑杆架通过钢丝绳索定点连接,这样杆架可以对伸缩喷杆起到支撑平衡的作用。喷杆伸缩操作可以根据实际农作物的作业尺寸要求对喷杆伸长量进行相应的控制改变,在运输时通过喷杆缩进可以节省杆架横向尺寸占有量,方便运输;但设计相对复杂,控制相对困难。
2.2 喷杆高度调节
普通小型喷杆式喷雾机的喷杆高度通常固定不变,不需要进行调节;但不能随着地势的高度和作物生长高度而自动改变喷杆离地高度,工作适应性较差,会影响农药喷雾量的均匀性和喷洒质量,降低喷洒效率[26]。但其机构设计简单,不需要使用自动操控系统,成本较低,适合于对特定株高、特定地势的农作物进行作业。为了能满足不同作物或相同作物不同生长时期的作业需求,实现更精确的喷雾高度,提高农药使用效率,减少农药损失,喷雾机需要能够调节离地高度[28]。喷杆喷雾机大多都采用液压系统进行高度调节,喷杆高度调节主要有以下几种设计结构。
1)平行四边形悬架升降调节结构。该调节机构主要组成部分是喷杆、平行四边形悬挂机构、液压油缸和控制系统等,如图8所示。通过驱动液压油缸的行程使升降杆高度发生变化,喷杆高度随之发生相应的变化。由于采用平行四边形结构,底座固定以后,当升降杆在液压油缸的驱动下进行升降时,悬挂机构另一端的喷杆连接件始终能够与地面保持垂直状态;当喷杆系统悬挂在喷杆连接件上时,能保证喷头喷洒方向始终垂直地面;当喷雾机在起伏不平的地面进行喷雾作业时,喷杆不会前后摆动,能够保证喷雾机良好的工作适应性[28-30]。该结构适用于大幅宽自走式喷杆喷雾机。
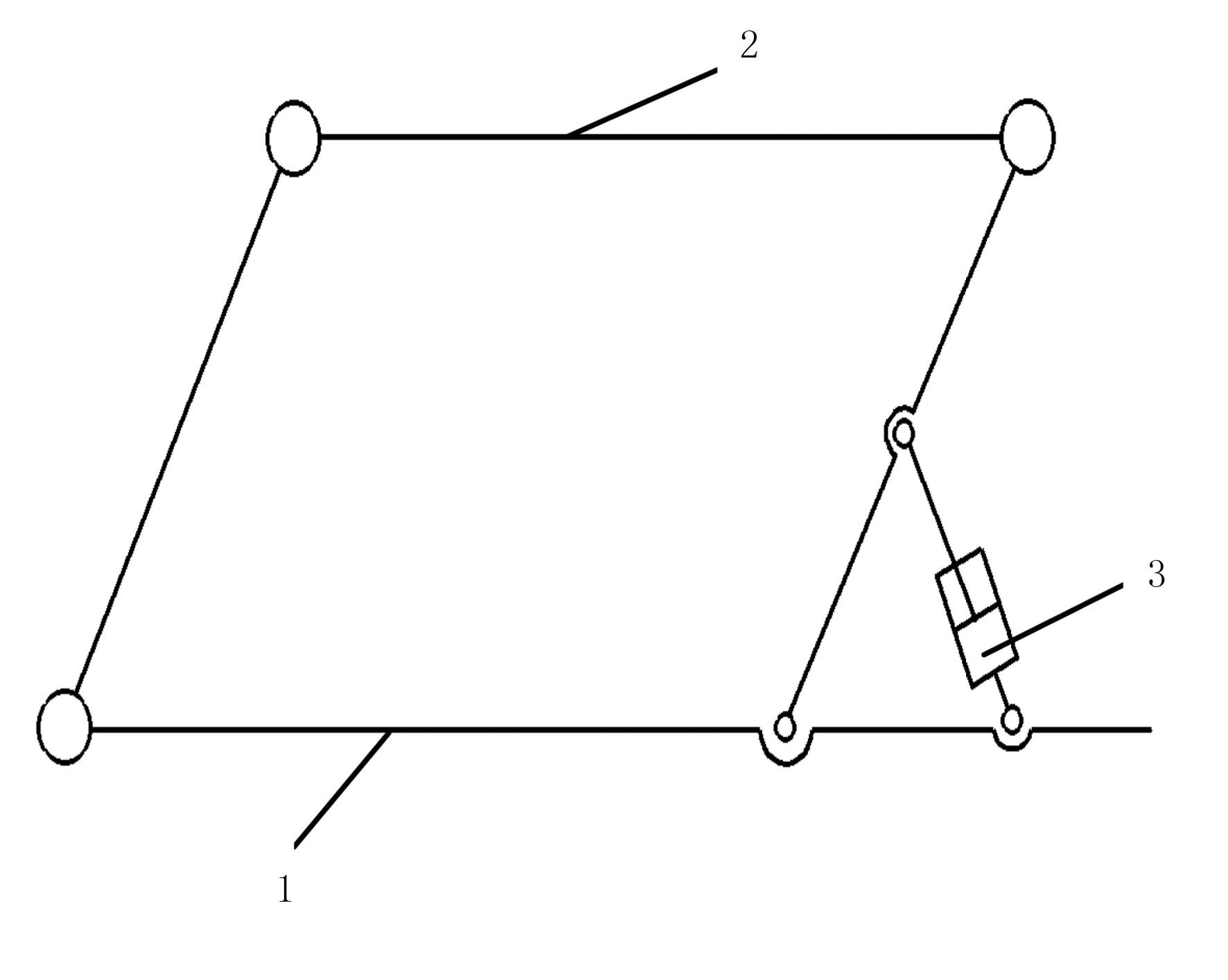
1.底座 2.升降杆 3.液压油缸 图8 平行四边形升降机构简图Fig.8 The draft of parallelogram concise machine
2)滑轨式升降调节结构。目前,悬挂式喷杆喷雾机大多都采用滑轨式升降调节结构,简单的滑轨式升降调节机构主要组成部分是活动件、固定悬架、液压油缸和控制系统等,如图9所示。当喷杆高度需要调节时,可以自动改变液压油缸的行程来控制活动件在滑轨里上下滑动,带动喷杆活动件跟随升降,以此达到控制喷杆高度的目的[31]。对于复杂的滑轨式喷雾机升降机构通常还需要使用钢绳、滑轮和其他机械结构来进行操作[32],能增强喷雾机的整机刚度,但喷雾机作业时的稳定性可能会降低。
3)组合式升降调节结构。喷雾机的喷杆悬挂机构主要是平行四边形升降架,通过液压系统驱动液压油缸改变行程来实现喷杆悬挂机构的升降。喷杆升降机构主体采用滑轨式设计,能够在喷杆悬挂升降系统的基础上进一步对喷杆进行升降;通过双重作用,能够使喷杆达到作业需求的准确高度,更能满足作业需求,但设计相对复杂[33]。
4)喷雾机高度调节结构还可以采用剪叉升降结构来进行调节,目前已经有农业机具正在采用这种结构来进行高度调节,剪叉结构示意图如图10所示。通过液压系统推动剪叉臂来精确地实现升降功能[34],液压油缸只需要很小的行程位移就能使喷杆高度发生很大的变化,变幅比例相对较大。另外,剪叉机构有很好的承重性和平稳性,且设计技术成熟,制造技术和质量能够达标。
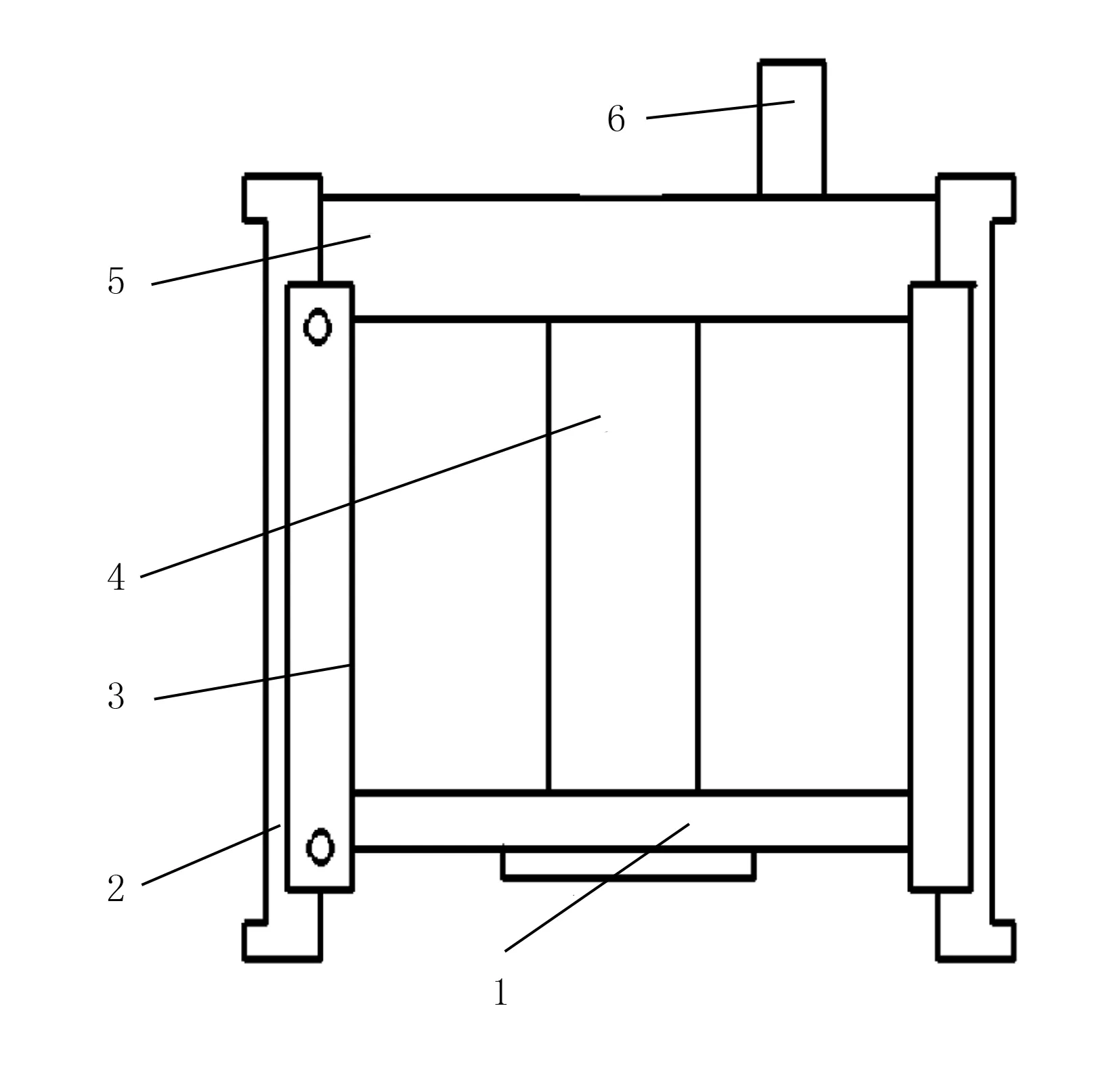
1.下横梁 2.导槽 3.连接板 4.连接梁 5.上横梁 6.液压锁支架 图9 滑轨式升降机构简图Fig.9 The draft of slide track concise machine
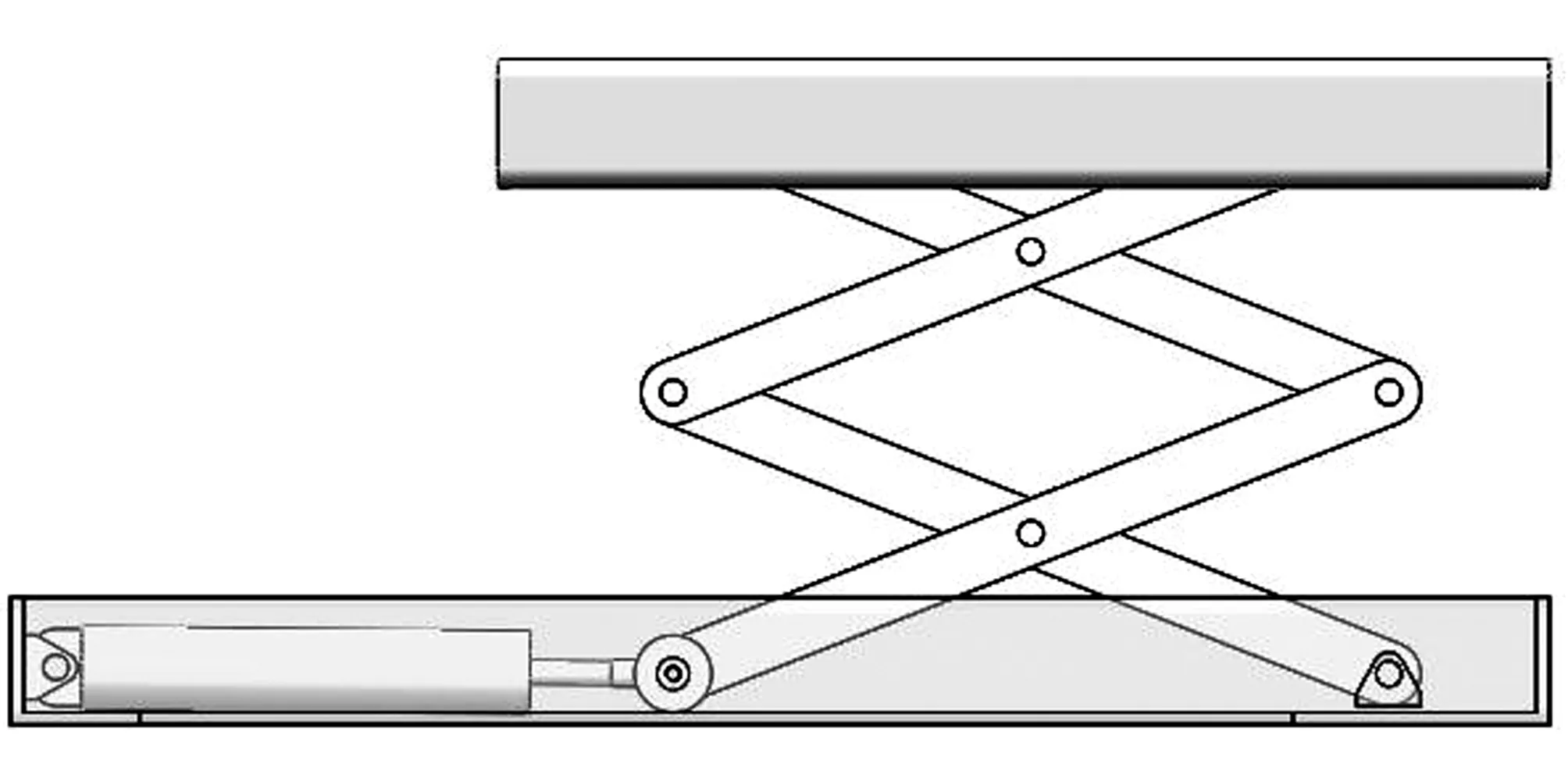
图10 剪叉式升降机构Fig.10 The scissors lifting mechanism
2.3 喷杆仰角控制
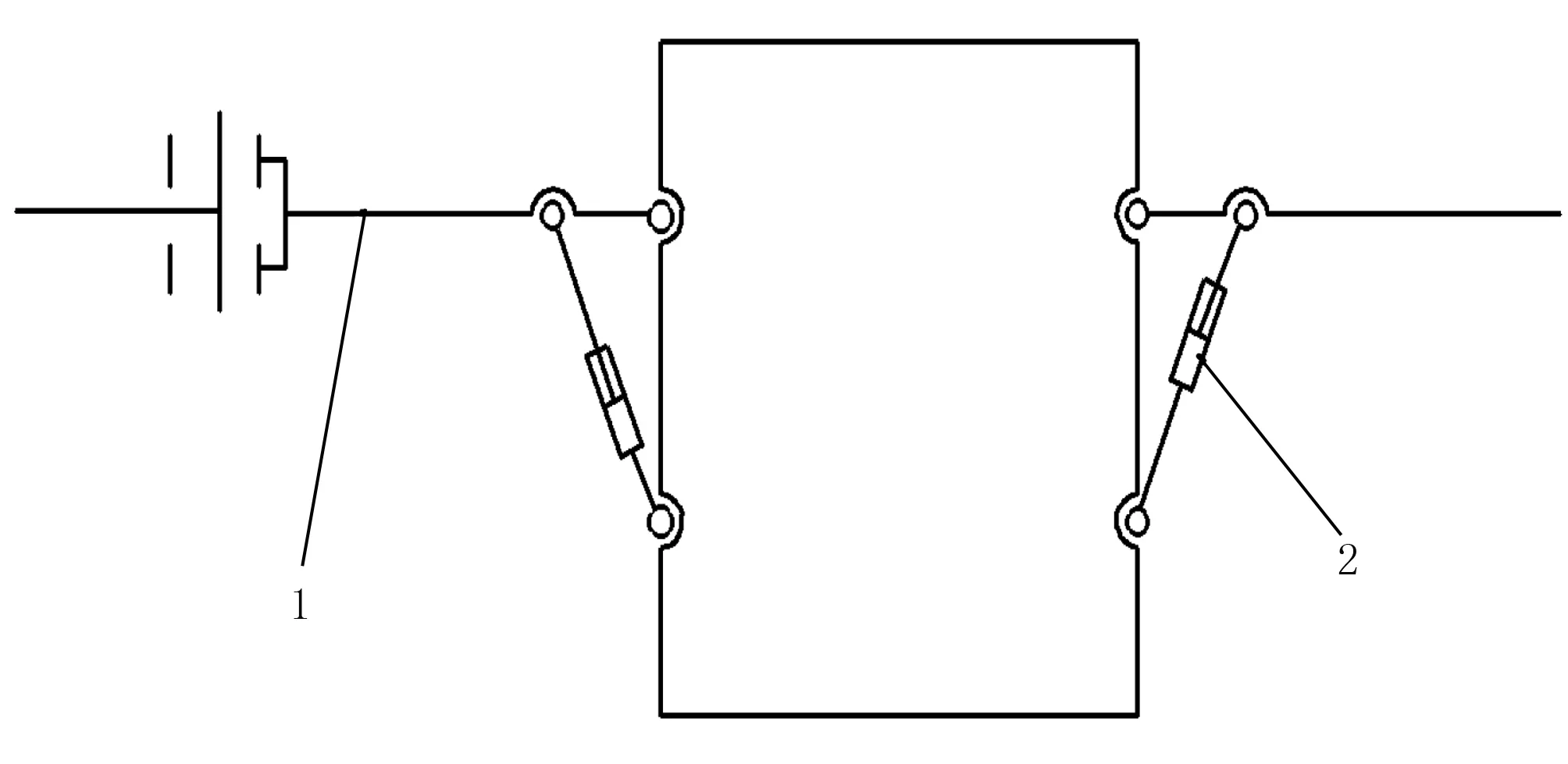
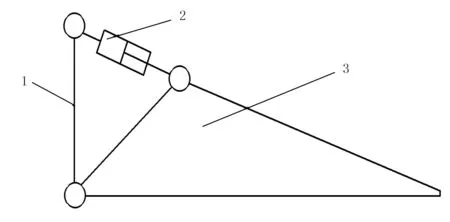
喷杆式喷雾机在田间作业时,耕地大多凹凸不平,工况复杂多变,由路面起伏产生的外部激励会导致喷杆发生不规则的倾斜和振动,有时会造成喷杆末端和喷头触地或刮碰农作物,对喷杆造成损害,缩短喷杆使用寿命;同时,影响喷雾沉积分布均匀性,降低喷洒效率和质量[35-36]。为了防止这种情况发生且不影响喷雾机正常作业,喷杆的仰角需要能够自动进行角度调整。目前,喷杆仰角的调节主要由液压系统控制,设计结构相对较少。液压油缸主要有两种布置形式:一种形式是液压油缸直接铰接在喷杆大臂上,结构简图如图11所示;另一种形式是液压油缸和喷杆大臂组成摆动机构,结构简图如图12所示[29]。两种调节结构都是通过改变液压油缸的行程来控制喷杆仰角发生变化。
1.喷杆大臂 2.液压油缸 图11 角度调节机构简图Fig.11 The angle regulating mechanism diagram
1.喷杆摆动杆 2.摆动液压油缸 3.喷杆大臂 图12 摆动油缸调节角度Fig.12 Swing cylinder adjustment angle
3 存在的问题
1)喷杆采用钢制桁架机构,整机结构笨重,浪费制作材料。
2)喷雾机的主体结构形式比较单一,喷杆仰角调节结构设计较少,大幅宽喷雾机控制元件过多,整机设计相对复杂,造价高昂。
3)设计及制造质量粗糙,达不到规定标准,喷雾机使用寿命短。作业时,喷雾效果不理想,影响农作物产量。
4 建议
1)采取结构优化、动力学分析技术,优化喷雾机结构设计,减轻整机质量;采用铝型材、塑料等轻型材料制作喷杆,降低总质量,节省材料。
2)采用多渠道设计丰富喷雾机结构的设计形式,增加喷雾机调整方式;采用简单操作机构及先进控制技术,减少整机油缸和控制元件数量。
3)采用机械现代设计方法与理论,在总体动力学层面上进行分析设计,确保喷雾机动态性能稳定;采用先进制造技术使整机制造质量更加精细;采取数字 监测与控制技术,实现整机自动化操作。
[1] 黄聪会,马洪亮,江光华,等.高地隙自走式植保机械喷杆系统结构优化与研究[J].农机化研究,2016,38(2):49-53.
[2] 贾卫东,张磊江,燕明德,等.喷杆喷雾机研究现状及发展趋势[J].中国农机化学报,2013(4):19-22.
[3] 魏新华,邵菁,缪丹丹,等.喷杆式喷雾机喷杆高度及平衡在线调控系统[J].农业机械学报,2015,46(8):66-71.
[4] 侯国义,殷岗.喷杆喷雾机使用技术[J].农村科技, 2010(10):69-70.
[5] 杨学军,严荷荣,徐赛章,等.植保机械的研究现状及发展趋势[J].农业机械学报,2002,33(6):129-131.
[6] 刘丰乐,张晓辉,马伟伟,等.国外大型植保机械及施药技术发展现状[J].农机化研究,2010,32(3):246-248.
[7] 陈长林,李显旺,张礼钢,等.悬挂式剑麻施药喷雾机设计及试验[J].农机化研究,2011,33(4):130-133.
[8] 丁阳.高等学校土木工程系列教材,钢结构设计原理[M].天津:天津大学出版社,2004.
[9] 刘静安,谢水生.铝合金材料的应用与技术开发[M].北京:冶金工业出版社,2004.
[10] 何宇声.玻璃钢的特性和应用[J].中国建材,1984(4):62-63.
[11] 许健南.塑性材料[M].北京:中国轻工业出版社,1999.
[12] Langenakens J J,Clijmans L,Ramon H,et al.The effects of vertical sprayer boom movements on the uniformity of spray distribution[J].Journal of Agricultural Engineering Research,1999,74(3):281-291.
[13] 邱白晶,何耀杰,盛云辉,等.喷雾机喷杆有限元模态分析与结构优化[J].农业机械学报,2014,45(8);112-116.
[14] 尹振华.喷杆的强度分析与结构改进[D].镇江:江苏大学,2014.
[15] 何耀杰,邱白晶,杨亚飞,等.基于有限元模型的喷雾机喷杆弹性变形分析与控制[J].农业工程学报,2014, 30(6):28-36.
[16] 陈达.柔性桁架式喷杆系统设计及动态仿真研究[D]. 北京:中国农业机械化科学研究院,2011.
[17] Ooms D,Ruter R,Lebeau F,et al.Impact Of The Horizontal Movements Of A Sprayer Boom On The Longitudinal Spray Distribution In Field Conditions[J]. Crop Protection,2003,22(6):813-820.
[18] Lardoux Y,Sinfort C,Enfält P,et al.Test Method for Boom Suspension Influence on Spray Distribution. I.Experimental Study of Pesticide Application under a Moving Boom[J].Biosystems Engineering, 2007, 96(1):29-39.
[19] 姚德秀.自走式高秆多用途喷杆喷雾机[J].农业开发与装备, 2015(8):49.
[20] 邹玮璐,刘继顺,左忠华,等.一种单油缸双折叠喷杆结构:中国,CN204482815U[P].[2015-12-31].
[21] 王强.农业喷杆控制系统的研究与设计[D].太原:太原理工大学,2016.
[22] 田学艳,坎杂,李玲.3W—1250型喷杆喷雾机的研制[J].农业机械,2005(5):116-117.
[23] 许超,陈永成,李瑞敏.液压升降折叠宽幅喷杆喷架的结构设计[J].农机化研究,2015,37(8):96-99.
[24] 吴伟斌,洪添胜,岳学军,等.基于斜拉绳式支撑的喷雾机喷杆机构:中国,CN1O183733OA[P].[2010-12-31].
[25] 李振生.基于虚拟样机技术的喷杆转换机构研究[D]. 南京:南京林业大学,2010.
[26] 王强,张文爱,王秀,等.一种高度可智能调节的农业喷杆控制系统设计[J].农机化研究,2016,38(9):156-160.
[27] 王立军,孙文峰,陈宝昌,等.喷杆式喷雾机的研究[J].农机化研究,2008(7):63-65.
[28] 随学仕.多功能喷雾机喷杆变换机构研究[D].南京:南京林业大学,2012.
[29] 王松林.喷杆高度自动调节系统设计与试验研究[D].杨凌:西北农林科技大学,2014.
[30] 王松林,赵春江,王秀.喷杆高度调节系统设计与试验[J].农机化研究,2014,36(8):161-164.
[31] 温浩军,康建明,王士国,等.3WF-12型超宽幅喷杆式喷机的研究与试验[J].安徽农业科学,2013(12):5635-5637.
[32] 王佳文,杨自栋.自动调平喷杆式喷药机设计与试验研究[J].农机化研究,2016,38(7):162-166.
[33] 冯静安,王卫兵,陈永成,等.自走式玉米高地隙喷雾机底盘系统设计研究[J].农机化研究,2014,36(7):117-120.
[34] 田素博,刘国均,邢大伟,等.温室多功能轨道作业车的研制[J]. 农机化研究,2017,39(1):116-121,126.
[35] Speelman L,Jansen J W.The effect of spray-boom movement on the liquid distribution of field crop sprayers[J].Journal of Agricultural Engineering Research,1974,19(2):117-129.
[36] Langenakens J J, Ramon H, De Baerdemaeker J. A model for measuring the effect of tire pressure and driving speed on horizontal sprayer boom movements and spray pattern[J]. Transactions of the Asae, 1995, 38(1):65-72.
猜你喜欢
农业开发与装备(2022年7期)2023-01-05 10:15:01
农业装备与车辆工程(2022年5期)2022-10-31 08:40:08
中国农机化学报(2022年8期)2022-08-12 02:29:10
农业机械学报(2022年2期)2022-03-14 07:57:20
装备制造技术(2019年12期)2019-12-25 03:05:50
中小企业管理与科技(2019年3期)2019-03-07 06:31:10
专用汽车(2018年10期)2018-11-02 05:32:32
农机使用与维修(2018年3期)2018-03-23 11:42:46
农业知识(2018年45期)2018-01-17 16:55:10
林业机械与木工设备(2017年3期)2017-03-08 07:55:35
