
一种云服务模式下测控一体化农田小型水闸的研发
2018-03-21 02:59包志炎张海波
中国农村水利水电 2018年2期
包志炎,梁 毅,张海波,王 萱
(1.浙江水利水电学院计算机应用技术研究所,杭州 310018;2.杭州大江东新城开发有限公司工程技术部,杭州 311225)
水闸是修建在河道和渠道上利用闸门控制流量和调节水位的低水头水工建筑物。在农田水利工程中,水闸在输水、配水和挡水等过程中发挥着重要作用,应用非常广泛。在互联网+时代,智能水闸已经成为国内外学者研究的热点[1-4]。当前国内市场上面向农村农田灌溉的水闸产品存在以下不足:根据以往操作经验通过手动方式控制闸门开度,未实现精准化控制,测流计量方式粗放[5];水闸整体功耗高,无法采用太阳能电源;未实现机械、动力、感知、智能等模块的一体化集成,造成野外安装、布线、调试工程量巨大;需要设立专门服务器,缺少专业的技术管理人员,运维成本高。本文将传统的机电一体化技术和新一代信息技术相结合,提出一种云服务模式下测控一体化、无线远程遥控的太阳能小型水闸,将有助于解决以上问题。
1 相关概念
1.1 云服务
云服务是指采用云计算技术的大规模服务器集群为用户提供的不必下载安装、上网即用、操作方便、功能丰富、价格低廉的互联网服务[6,7]。简单来说,云服务可以将用户所需的软件、硬件等支撑环境都放到网络上,用户在任何时间、地点,使用低配IT设备即可实现数据存取、计算和呈现等目的。在互联网+时代,云服务极大地改变了传统数据中心的运行模式,大大降低了用户运维成本。
1.2 一体化技术
一体化技术是综合运用机械动力、微电子、自动控制、计算机、信息、传感、接口等技术,根据系统功能目标优化组织,合理配置与布局各功能单元,在多功能、高可靠、低能耗基础上实现特定目标,并达到最优化的系统工程技术[7]。一体化系统一般由机械结构、动力、运动、感知、智能等组成要素有机结合而成,其主要发展方向为数字化、智能化、模块化、网络化、微型化、集成化和绿色化。
1.3 智能水闸
国内外学者对智能水闸作了深入研究[2,5,8],但未形成统一的定义,基本形成以下共识:智能水闸是指像个人电脑一样,具有独立的运作系统,能支持有线(无线)网络接入,可以实现实时监测、远程监控和智能运行的水闸。
2 总体设计方案
采用太阳能绿色电源,为动力系统和数据采集传送等模块提供电能。选用ARM Cortex-M3芯片,研发本地嵌入式控制系统。使用GPRS/3G/4G无线通讯模块,完成数据或指令的远程传送。在云服务器上建立数据中心,存储水闸基本数据、实时数据和控制数据,同时研发并部署水闸远程测控云平台,作为用户访问接口,主要实现水闸的实时监测、远程监控和智能运行等功能。水闸系统总体方案见图1。
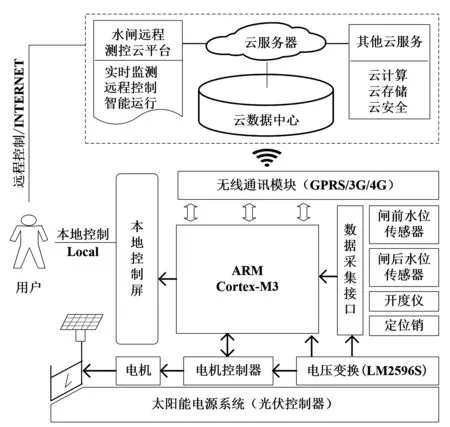
图1 系统架构Fig.1 System architecture diagram
3 关键技术及实现方法
3.1 水闸机械结构设计
为实现水闸一体化设计,将太阳能板、电机以及传动机构集成在水闸本体中,将无线通讯模块、嵌入式控制板、电机控制器、光伏控制器等封装在控制盒中。图2给出了水闸机械结构图。水闸主要由支架、底座、阀芯、定位销、电机、传动机构以及太阳能电源装置等组成。水闸工作时,电机通过齿轮驱使阀芯转动。当阀芯与底板垂直时,隔断水流;当阀芯连续转动时,实现水闸开度的连续增减。在底座两侧设有定位销,供闸门运行至预设开度时锁住阀芯。定位销由电磁铁组成,通电工作,断电复位。采用旋转式阀芯结构设计,使闸门驱动力与水流同向,利用水流冲力降低了闸门启闭时驱动能耗。

图2 水闸机械结构Fig.2 Mechanical structure of sluice
水闸运行时的开度值是决定过闸流量大小的重要因素。要实现对过闸流量的精准化控制首要的是要实现对开度进行精确控制。图3给出了旋转式水闸开度计算分析图。现讨论在不同闸前水位情况下,水闸阀芯向逆时针方向从0°~90°旋转过程中有效开度he的计算办法。经过分析可知,可以分为以下3种情况:
(1)
式中:R为水闸旋转半径;θ值可通过采集开度仪实时数据得到;H为上游水深。
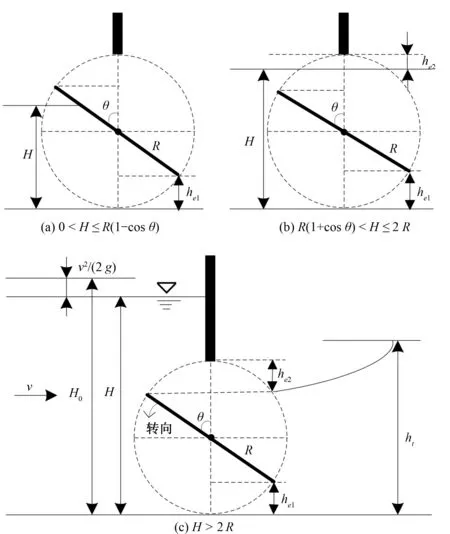
图3 水闸开度计算分析图Fig.3 Calculation chart of sluice opening
同理,可以得到水闸阀芯从90°~360°旋转过程中有效开度的计算办法。在阀芯连续旋转过程中,水闸开度也会跟着在0到2R之间连续变化。因此,只要精确控制旋转角度,即可对水闸的有效开度实行精准化控制。
在获得水闸有效开度的基础上,结合有关水力学公式,可以计算水闸在闸孔出流状态下的过闸流量[9]:
(2)
式中:B0为闸孔总净宽;σ为淹没系数;μ为 孔流流量系数;ε为 孔流垂直流速系数;φ为 孔流流速系数;λ为计算系数。
对于旋转式水闸,孔流流速系数φ可采用0.95~1.0,淹没系数 均可以通过查表得到[9]。
3.2 太阳能供电模块
在较偏僻的野外安装水闸时,从电网取电是比较困难的,而且布线成本高,采用太阳能供电可以有效解决该问题。因此为水闸配备光伏电源。实验水闸阀芯直径为80 cm,采用24 V、12 AH的铅酸蓄电池,2组10 W的太阳能板。通过LM2596S开关电压调节器将24 V转为5 V输出。光伏供电系统为水闸同时提供了24 V和5 V 2个等级的输出电压,见图4。选用智能型PWM充电方式,有效减小对蓄电池的冲击,延长蓄电池使用寿命。供电系统具有过充、过放、过载、短路、过温和反接保护功能,有效保证系统安全运行。
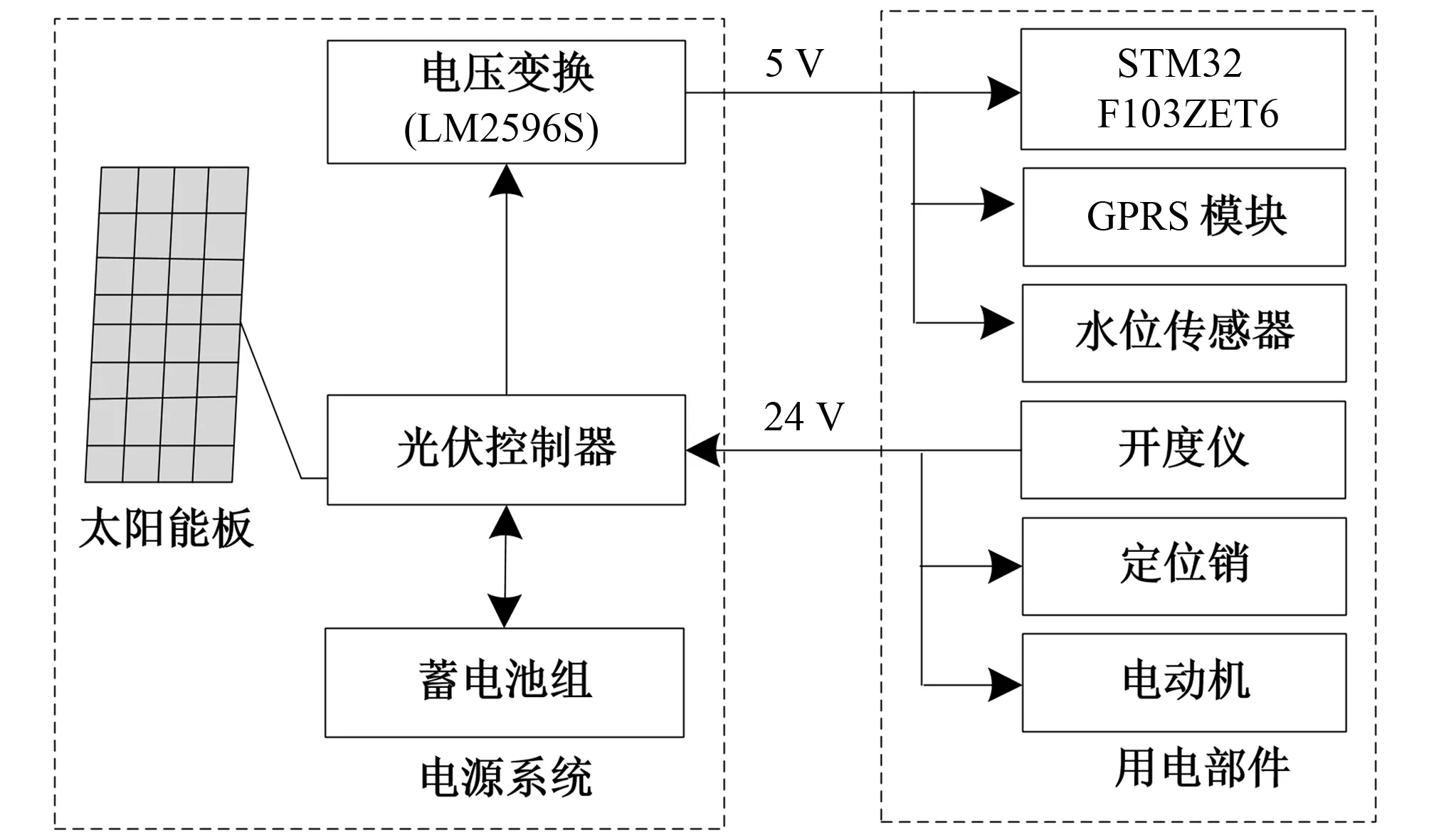
图4 光伏供电系统Fig.4 Photovoltaic power supply system
3.3 水闸远程测控
要完成水闸运行状态的实时监测,关键是要实时采集水闸终端各传感器和控制器的数据,并将他们发送至云端数据库,Web网站对数据进行可视化呈现。在水闸本地端,在μC/OS-II系统上研发嵌入式控制系统,通过中断的方式按一定频率向各传感器轮询实时数据;将采集到的水位、开度、运行状态等信息与上一次数据进行比较,仅将更新过的数据通过预定格式编码后,使用Socket方式发送至云端,见图5。
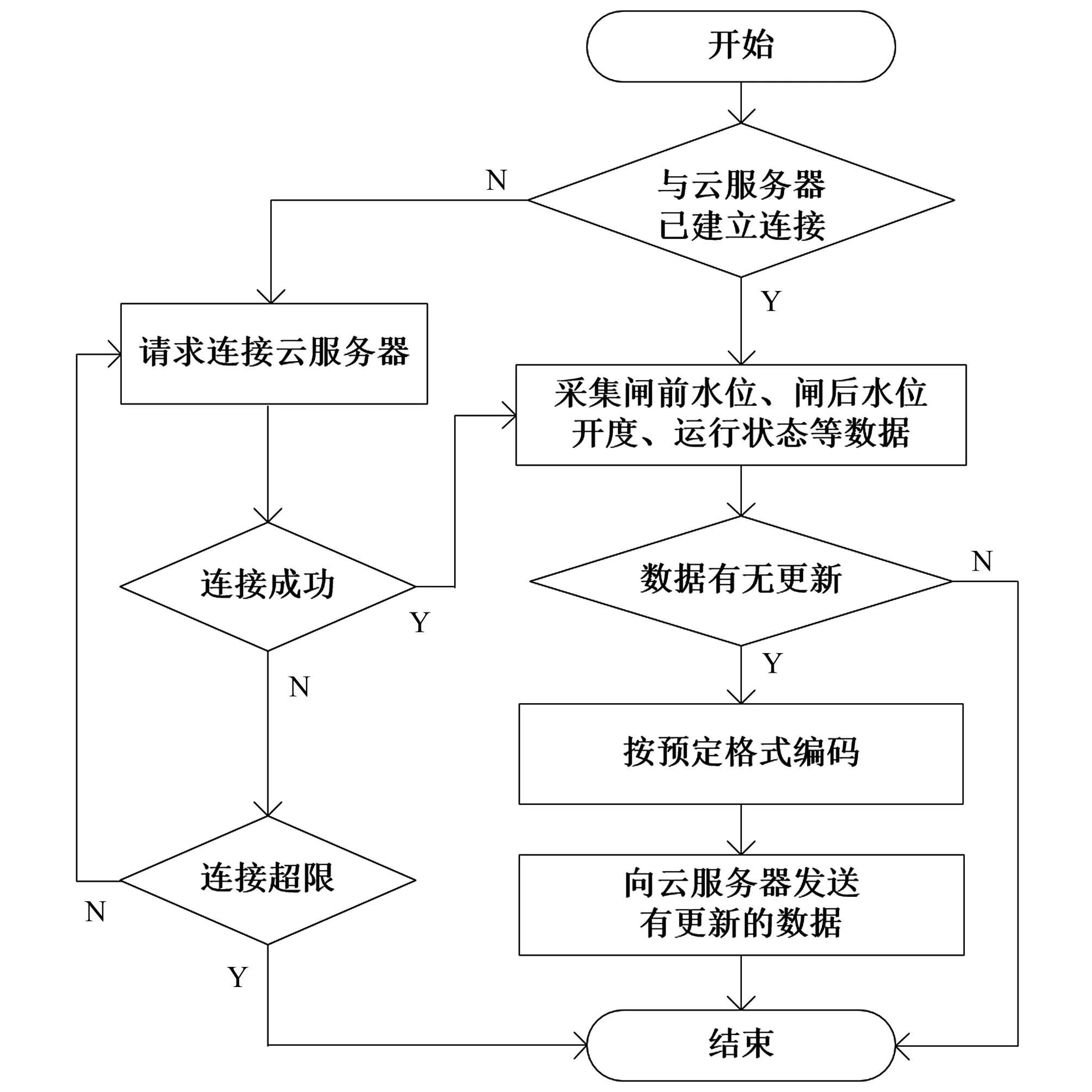
图5 水闸终端数据发送流程Fig.5 Data flow of sluice terminal
云端服务器接收到水闸端发送的数据后,解码后对数据格式是否正确进行校核;校核通过后,更新数据库和操作日志。下面给出云服务器接受水闸实时数据的部分实现代码:
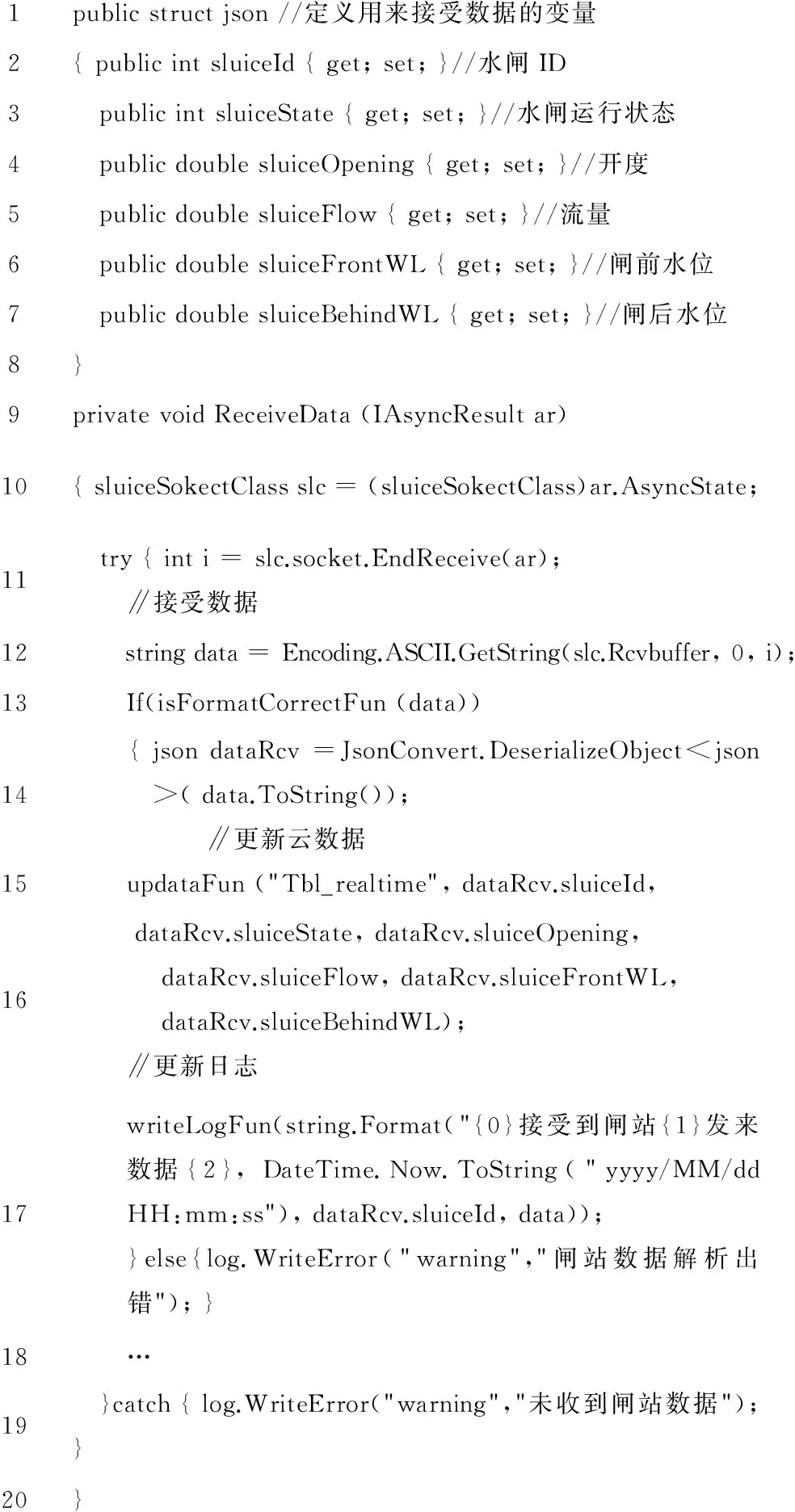
1publicstructjson//定义用来接受数据的变量2{publicintsluiceId{get;set;}//水闸ID3 publicintsluiceState{get;set;}//水闸运行状态4 publicdoublesluiceOpening{get;set;}//开度5 publicdoublesluiceFlow{get;set;}//流量6 publicdoublesluiceFrontWL{get;set;}//闸前水位7 publicdoublesluiceBehindWL{get;set;}//闸后水位8}9privatevoidReceiveData(IAsyncResultar)10{sluiceSokectClassslc=(sluiceSokectClass)ar.AsyncState;11 try{inti=slc.socket.EndReceive(ar); ∥接受数据12 stringdata=Encoding.ASCII.GetString(slc.Rcvbuffer,0,i);13 If(isFormatCorrectFun(data))14 {jsondataRcv=JsonConvert.DeserializeObject
用户通过访问云平台实现对水闸的远程控制。常见的远程操作包括开启、关闭、重启、设置开度、设定工作模式等,相应的操作指令经云端向水闸嵌入式控制模块发送。嵌入式控制模块接受指令后,向电机控制器传达并执行指令。
3.4 智能运行
针对单个水闸,根据不同应用需求,设计了按水位和按流量2种不同的智能运行模式,2者均需要通过对闸门开度的动态精确控制来实现。将预期的水位、流量信息作为特定算法的输入得到合理的开度值,并让闸门电机执行到该开度,这是实现精准化控制的2个必备环节[10,11]。
电机在执行中,收到停止指令后,因阀芯惯性运动和水流的冲力等原因,闸门并不会瞬间停止,进而会造成执行误差。为减少执行误差,需要在理论停止时间点之前发送停止指令。将开度控制误差在阈值范围内的闸门运动角速度w和指令发送提前时间Δt存入历史控制实例库,w是旋转角度 的变化率, 通过检测开度仪数据得到。通过对历史控制实例库的学习,可以根据闸门瞬时角速度w即可得到合理的提前量Δt。
将这样的思想与模糊控制相结合,建立带执行偏量因子的水位模糊控制模型,以提高开度控制精度,实现水闸的智能运行,见图6。采用二维模糊控制器,将设定水位r和实测水位c的差值及其偏差变化率ec作为输入,以闸门实际开度U′为输出变量。在运行中不断检测e,通过输入、输出量的模糊化,模糊推理决策和模糊判决生成模糊查询表,再分别乘以相应的比例因子得到理论开度U,作为电机控制开度的执行目标值;在即将达到开度U前,在Δt前发送停止指令,最终得到实际开度U′。计算U′与U之间的误差,如果小于期望阈值,则将本次闸门瞬时角速度w和时间提前量Δt存入开度控制实例库,供下次开度控制学习使用。
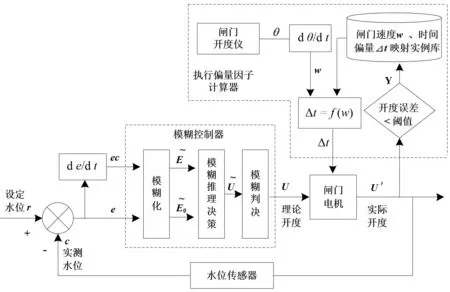
图6 带执行偏量因子的水位模糊控制模型Fig.6 Fuzzy control model of water level with deviation factor
4 试验验证
为了验证水闸控制开度的精度,在浙江水利水电学院搭建模拟灌区,安装了4扇实验水闸,在阿里云上建立数据中心,部署水闸远程测控云平台,并使用不同配置的用户终端设备对水闸开度的远程控制精度和响应时间进行测试。
实验水闸的旋转直径分别为600、800、1 000和1 200 mm 4种规格,采用了如表1所示的阿里云服务器和高、中、低3种不同配置的计算机访问终端,其中阿里云服务器采用通用型配置,包年价格目前在1 000 元以内,测试结果数据见表2。结果表明云平台部署简单,运行稳定,运维成本低,最大开度控制误差为1.1 mm,最长响应时间为0.6 s,与用户终端设备配置高低相关性不大。水闸远程测控云平台界面、嵌入式系统主界面以及实验水闸见图7和图8。
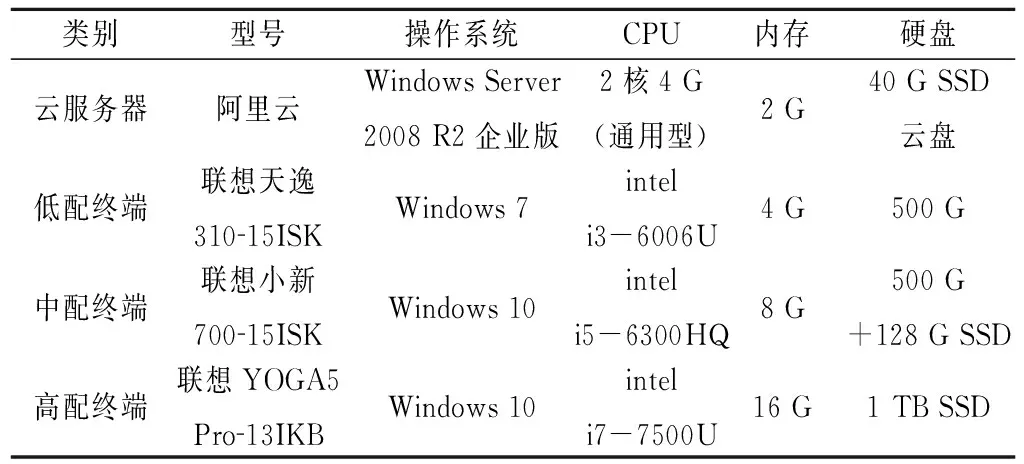
表1 云服务器及测试计算机终端配置Tab.1 Configuration of cloud server and test computer terminal
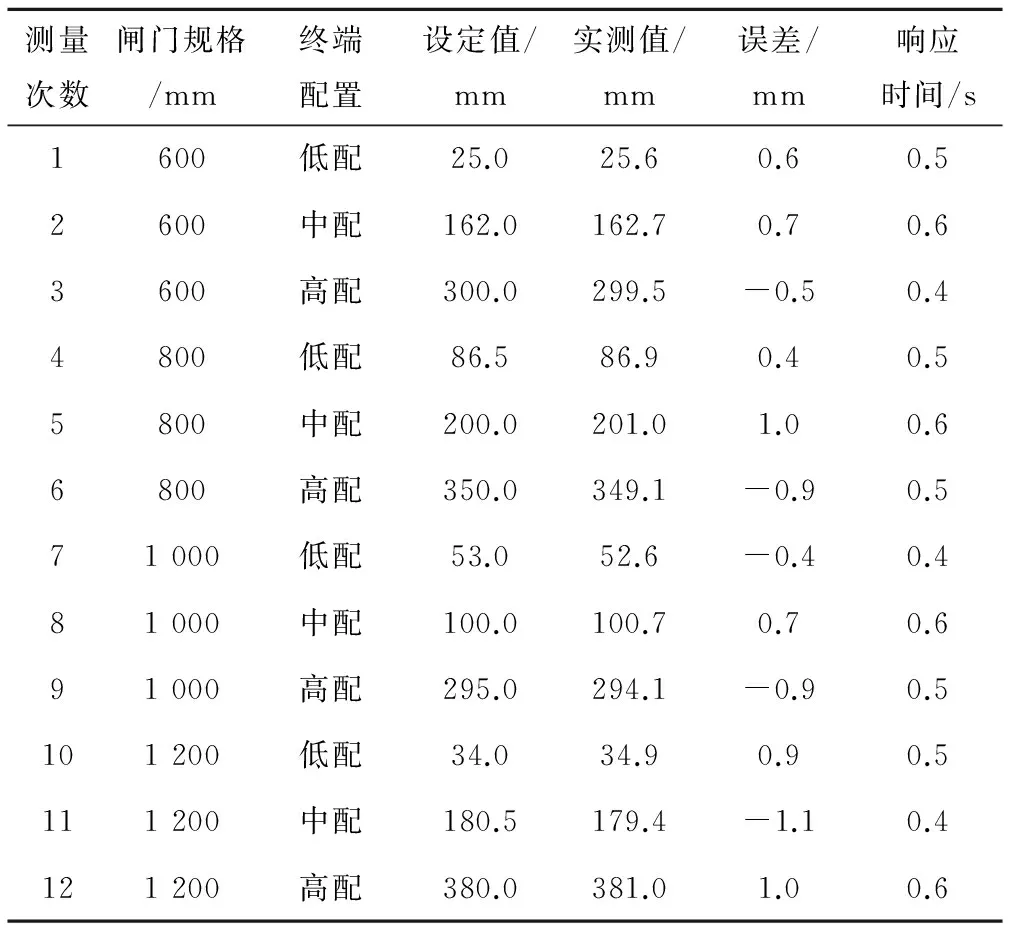
表2 云服务模式下闸门开度远程控制实验结果Tab.2 Results of remote control of gate opening undercloud service mode

图7 水闸远程测控云平台Fig.7 Remote monitoring and control cloud platform for sluices
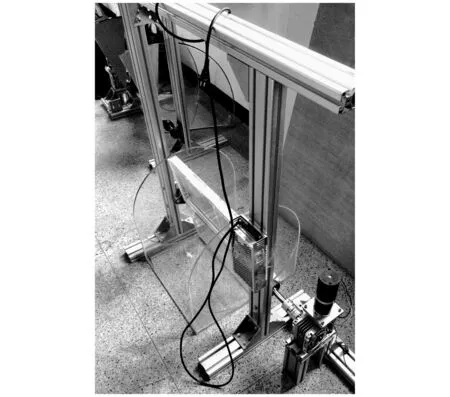
图8 水闸实验装置Fig.8 Sluice experimental device
5 结 语
在云服务模式下设计了一种测控一体化、无线远程遥控的太阳能小型水闸。将太阳能电源、机械结构、动力系统、感知设备、无线通讯模块等组件进行一体化集成,有助于缓解传统水闸野外安装、布线、调试的工程量大等问题。在云服务模式下,建立云数据中心,开发和部署了水闸远程测控云平台,不需要专门配备服务器、访问终端和支撑环境,系统部署简单,管理便捷,运维成本低。水闸系统运行稳定,开度控制进度高,响应时间短,能较好的实现实时监测,远程控制和智能运行等功能,适合中小型农村农田灌溉明渠输水的精准化控制。目前该水闸装置尚处于实验室测试阶段,下一步将着重研究云服务模式下的闸群智能调度模型以及如何转化为实际产品投入农田灌区实践运用。
□
[1] Guo Huanlou,Kang Weili.Research on control system for sluice gate flow based on fuzzy neural network PID[J].Applied Mechanics and Materials, 2012,199(2):1 779-1 782.
[2] Habibzadeh A,Vatankhah A R,Rajaratnamn N.Role of energy loss on discharge characteristics of sluice gates[J].Journal of Hydraulic Engineering,2011,137(9):1 079-1 084.
[3] 吴润兰,谢崇宝,高 虹, 等.测控一体闸测流精度校验与分析[J].中国农村水利水电,2011,(8):124-131.
[4] 李臣明,赵丽华,吴学文,等.基于水位、流量预测信息的水闸群调节方法[J].灌溉排水学报,2015,34(3):70-74.
[5] 张从鹏,罗学科,李玏一,等.面向灌区调水工程的远程自动计量闸门研究[J].农业机械学报,2014,45(8):172-177,275.
[6] 王斌锋,苏金树,陈 琳.云计算数据中心网络设计综述[J].计算机研究与发展,2016,53(9):2 085-2 106.
[7] 张葆青,闫 石,陈 爽.机电一体化技术的现状与发展趋势[J].机床与液压,2011,39(24):105-106,121.
[8] LIN C H,YEN J F, TSAI C T.Influence of sluice gate contraction coefficient on distinguishing condition[J].Journal of Irrigation and Drainage Engineering.2002,128(4):249-252.
[9] 王英华,陈晓东.水工建筑物[M].北京:水利水电出版社,2010.
[10] 崔 巍,陈文学,郭晓晨,等.明渠调水工程闸前常水位运行控制解耦研究[J].灌溉排水学报,2009,28(6):9-13,29.
[11] 李毅佳.节制闸调控下明渠输水系统水力特性研究[J].中国农村水利水电,2017,(5):46-57.
猜你喜欢
价值工程(2022年27期)2022-10-10
湖南水利水电(2021年5期)2021-11-26
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年18期)2021-11-05
建材发展导向(2021年10期)2021-07-16
中国船检(2020年11期)2020-11-27
水电站机电技术(2020年11期)2020-01-05
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
太空探索(2016年12期)2016-07-18
