基于实时态势的作战仿真推演技术研究
2018-03-19 07:51:35吴章华曹志敏
指挥控制与仿真 2018年1期
吴章华, 曹志敏, 贾 贞
(江苏自动化研究所, 江苏 连云港 222061)
现代战争的复杂性决定了战场态势具有复杂多变、不确定、对抗性强和信息量大等特点。根据瞬息万变的战场态势快速预测未来,为指挥员及时做出正确决策提供依据,并对作战方案进行评估,成为当前指控系统决策支持的难点[1]。作战方案推演是在作战行动实施前或者实施过程中,按照作战方案规定的作战意图、顺序和进程,对作战方案中的不同阶段的部署、行动所达成的态势、目标或结果进行演练分析的过程[2]。因此作战仿真推演系统成为辅助指挥决策人员进行方案分析的重要工具。
传统的作战方案推演系统是一种离线推演系统。在推演准备阶段,首先需要制作想定文件,然后相关人员根据当前的战场态势依据任务规划,配置资源的初始位置和数量、仿真模型、指挥结构、行动路线等相关参数,实现作战仿真进行作战想定制作,再经仿真引擎加载运行给出结果,最后在此基础之上运行评估软件,对仿真结果进行评估。然而现代战争的复杂性、多变性特点决定了战场态势变化迅速、战场信息量大的特点,基于当前的战场态势,人工制作想定耗费大量时间,不仅会导致人为的失误,难以快速制作出多种作战方案想定,同时会失去时效性。因此在作战过程中,传统的作战仿真推演系统在辅助作战指挥人员进行快速决策方面存在不足。为了将信息优势转化为决策优势,提高作战决策的有效性,迫切需要探索新的方法和手段。一种可行的方案就是将战场态势信息和相关作战信息实时注入基于仿真的决策支持系统,使仿真系统基于最新态势快速推演出各种行动方案。根据推演过程与结果,分析和评估行动方案,并优选、调整和制定新的行动方案,实现在线推演。
将仿真直接嵌入指控系统,实现在线推演,辅助指挥作战人员进行相关决策,在国外已有先例。比如美军应用于陆军、旅级指挥所的“深绿系统”[3],已嵌入到美军战役作战计划的系统中的战区级联合作战模拟系统(JTLS)[4]。目前国内相关应用的资料很少,尚处于探索阶段。
1 实时推演与离线作战仿真系统的区别
基于实时态势的作战仿真推演系统以离线作战仿真系统为基础,通过对各模块的改造,实现仿真系统与指挥信息系统的互联互通,并以实时态势为基础,辅助指挥人员进行作战方案的快速制定。二者区别如表1所示。
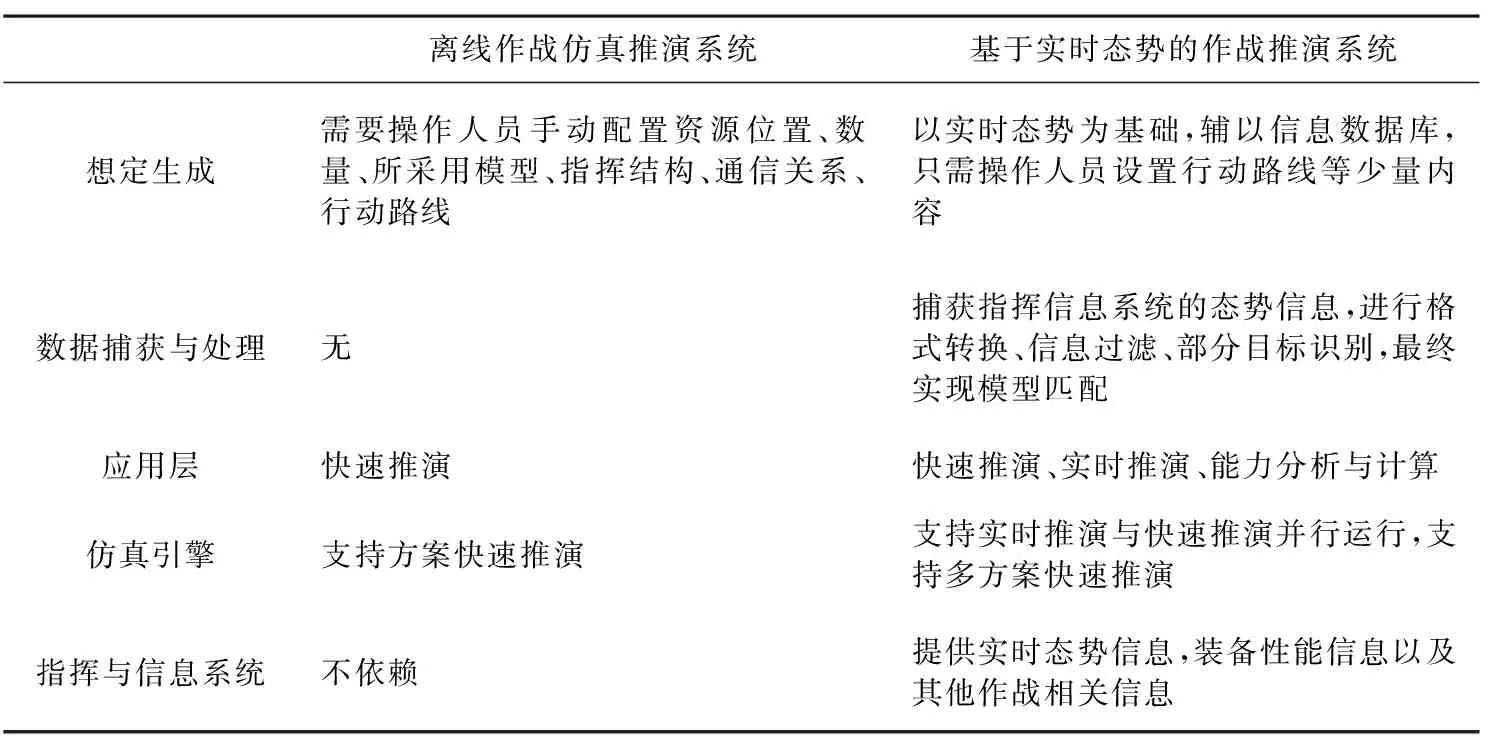
表1 实时推演系统与离线作战仿真系统的区别
由表1可看出,离线作战仿真推演系统与基于实时态势的作战仿真系统有很大不同,比如离线推演缺少数据捕获预处理模块,不依赖于指挥信息系统。但也有很多相似功能,比如支持快速推演,需要想定计划等。因此以离线仿真推演系统为基础,实现可嵌入指挥信息系统的在线仿真系统,首先需要研究系统框架,再嵌入新的功能模块。
2 作战仿真推演系统总体架构
2.1 基于实时态势的推演系统架构
实时决策需要基于真实的战场态势分析和评估各种行动方案,预测各种方案对敌产生的效果,以及这些行动效果对敌指挥员下一步决策的影响,让指挥员可以在决策实施前进行快速的行动方案分析,探索多种可能性,确定最有利的行动方案[5]。为实现以上功能,基于实时态势的作战仿真推演系统框架设计如图1所示。
整个系统框架由应用层、仿真引擎、想定生成组件、用户接口组件、数据捕获与处理模块、仿真结果分析评估工具以及指挥信息系统组成。该部分主要依据实时推演系统的特点进行相关模块的介绍。
指挥信息系统是整个系统的信息源,同时为作战仿真推演系统提供装备性能数据库以及历史情报数据库的数据库查询服务。数据捕获与处理模块是实时推演系统区别于离线推演系统的关键部分。此模块是基于实时态势的作战仿真推演系统与指挥信息系统进行信息交互的接口,是本文重点讨论的内容。由于来自指挥信息系统的实时态势信息格式与仿真系统不同,同时态势信息中目标种类多、目标信息量大,因此需要对目标进行筛选过滤,同时对不明目标信息进行识别,最后对目标进行模型匹配,查阅装备性能数据库初始化目标仿真实体的参数;实时推演不断地将实时态势信息根据需要创建相应的仿真实体,实现仿真系统与实时系统相一致。能力分析基于实时推演系统,实现基地飞机最大出动量计算、突防效果分析计算、通信链路中关键节点计算、地空导弹杀伤远界计算,避免指挥人员手动量算,提高决策效率;想定生成根据通过主动读取实时推演系统实体信息,结合相关数据库,辅助指挥人员进行想定文件的快速编辑。
2.2 仿真推演流程分析
基于实时态势的作战仿真推演系统的仿真推演流程如图2所示。
整个系统的运行按照逻辑关系可分为三个阶段,分别是系统初始化阶段、实时推演阶段、快速推演和评估阶段。系统运行初始阶段首先访问静态目标数据库,根据目标唯一标识符在装备性能数据库中查找目标参数,完成目标仿真模型的初始化。然后开放总线接收实时的战场态势信息,根据态势信息中的目标型号访问装备性能数据库,新建动态目标的仿真实体。由于在初始化运行阶段需要新建大量目标的仿真实体,因此需要耗费一定时间。
在实时推演阶段,实时系统仍在不断接收态势信息,但只需创建少量新目标的仿真实体, 实现与实际态势相一致的仿真态势。在此基础上,军事指挥人员进行作战方案的快速制定,并生成想定文件。同时可以依据当前的态势信息进行能力分析计算。
快速推演是超实时运行在实时推演系统基础上制作的想定文件,并将推演结果送入评估工具进行评估。若结果理想,则将最佳方案以及结果通过用户接口展现给操作人员,辅助指挥人员进行相关决策;否则需要指挥人员重新修改作战计划。
3 态势捕获与处理技术
3.1 态势捕获与处理流程分析
态势捕获与处理模块是普通作战推演仿真软件所不具备的功能,是整个系统进行推演的基础。态势捕获与处理流程如图3所示。
实时态势信息量大,目标种类多,首先滤除不相关的目标,比如渔船、民航客机等。由于信息质量的参差不齐,与作战计划相关的目标可进一步分为型号已知的目标和型号未知的目标。对于型号已知的目标,首先确认该目标是否已经创建,对于已创建目标进行目标状态更新,对于未创建仿真实体目标,通过查询装备性能数据库进行模型参数初始化,再在仿真系统中创建相应的仿真实体模型。对于型号未知目标,采用相关算法进行分析匹配后进行模型初始化操作。
3.2 基于历史数据的模型匹配技术研究
由于仿真实体建立是以模型为基础,因此需要明确目标型号进行相应的建模仿真,尽可能提高仿真结果的说服力,因此需要对未知型号目标进行识别。由于根据目标的当前运动状态信息,在装备性能数据库中可以查找多个匹配模型,因此需要结合历史态势数据库,通过相关分类识别算法,评估出更接近的模型。在实时态势中,目标出现的位置与时间有其相关性,而这种相关性是进行目标识别的重要线索[6]。因此以位置和时间作为过滤条件,从历史态势数据库中选取近期以及相应范围内的目标信息。
目前常用的分类方法有决策树、人工神经网络、SVM、Bayes、KNN等[7]。由于KNN无须事先分类,适合多分类问题,适合对稀有事件进行分类的特点[8],本文采用KNN算法,通过特征匹配,选取与未知目标型号最接近的类型。对于匹配率小于阈值的目标,采用通用模型对其进行参数初始化,阈值大小由操作人员给出。
采用KNN算法识别不明型号目标的关键步骤如下:
1)提取目标特征参数有敌我属性、环境属性(海陆空)、目标型号、经度、纬度、发现距离、发现方位、目标航向、首次发现时间、首次发现距离, 则态势数据可以表示为X(x1,x2,x3,…,xn);xi表示目标的第i个特征。
2)从收到未知型号目标态势信息中提取位置信息,以位置信息为依据提取历史态势数据库中近期该区域附近的目标态势信息。
3)分别根据K邻近算法,以当前未知目标信息与提取的历史数据相比较,对参数进行误差归一化,以经度归一化为例:
(1)
Δlonmax=max(Δlon1,Δlon2,…,Δloni)
(2)
(3)

(4)
4)对每个特征因素进行差值归一化后,采用欧氏距离作为dist。
5)得到目前K个最临近样本中的最大距离maxdist,如果dist小于maxdist,则将该训练样本作为K-最近邻样本,统计K-最近邻样本中每个类标号出现的次数,出现次数最多的类即为最临近类。
6)匹配率为最临近类出现的次数与K的比值。
说明:

•由雷达方程可知可见最大发现距离与目标的最大散射截面积的1/4次方成正比,因此我们选取首次发现距离作为重要参考因素。
4 应用实例
本文通过一个简单的实例验证基于历史数据的模型匹配技术在基于实时态势的作战仿真推演系统中的应用。以空情数据为例,选取两个月份的历史融合态势数据集,整理前一个月的数据如表2和表3所示。其中BLOB数据为有关该目标当前航迹的点集。假设后一月的融合态势信息为实时态势,提取敌方的实时态势信息,并将目标舷号信息去除,如表4和表5所示。

表2 历史上探测到三个典型目标的航迹信息

表3 历史上探测到三个典型目标的航迹信息(续表)

表4 实时态势信息

表5 实时态势信息(续表)
采用上文介绍KNN算法应用方式进行数据的处理,根据专家经验选取阈值大小为0.8,经过计算处理后,得到整体的目标模型匹配成功率为0.872,满足实际需求。
5 结束语
为更好地支持作战指挥人员进行快速决策,本文在离线作战仿真推演系统的基础上,开展对基于实时态势的作战仿真系统框架研究,对比分析了与离线作战仿真推演系统的差异。本文重点研究了态势捕获与处理技术,给出实时态势捕获与处理的工作流程,提出利用KNN算法结合历史数据库实现对不明目标进行模型匹配的方法。最后通过向推演系统注入态势信息,验证算法的有效性。但基于实时态势的作战仿真推演系统应用于实际作战中还有不足,比如系统在面对复杂的实时态势时,如何利用相关算法快速生成较优的作战方案,以及如何将人工智能、深度学习等技术应用于系统中有待进一步研究。
[1] 周云. 面向实时作战决策支持的动态数据驱动仿真理论和方法研究[D]. 长沙:国防科技大学, 2010: 4.
[2] 程路尧. 作战方案推演系统的设计与实现[J]. 舰船电子工程, 2014,34(11):9-12.
[3] 周云, 黄教民, 黄柯棣. 深绿计划关键技术研究综述[J]. 系统仿真学报, 2013, 25(7): 1633-1638.
[4] 窦林涛,初阳,周玉芳,等. 平行仿真技术在指控系统中的应用构想[J]. 指挥控制与仿真,2017,39(1): 62-69.
[5] 胡晓峰, 郭圣明, 贺筱媛. 指挥信息系统的智能化挑战——“深绿”计划及AlphaGo带来的启示与思考[J]. 指挥信息系统与技术, 2016, 7(3): 1-7.
[6] 李小花,李洙:基于数据挖掘的战场目标综合识别技术[J]. 指挥控制与仿真, 2016,38(3):16-23.
[7] 苏毅娟, 邓振云, 程德波,等. 大数据下的快速 KN N分类算法[J]. 计算机应用研究, 2016, 33(4): 1003-1006.
[8] 张著英, 黄玉龙, 王翰虎. 一个高效的KNN分类算法[J]. 计算机科学, 2008, 35(3): 170-172.
猜你喜欢
纺织科学研究(2021年9期)2021-10-14 08:52:10
防爆电机(2021年4期)2021-07-28 07:42:46
中国特种设备安全(2021年11期)2021-05-05 06:13:18
铁道通信信号(2020年6期)2020-09-21 09:23:34
汽车与安全(2020年1期)2020-05-14 13:27:19
中国外汇(2019年19期)2019-11-26 00:57:36
中学生数理化·七年级数学人教版(2019年6期)2019-06-25 01:01:34
中国化肥信息(2019年5期)2019-06-25 00:52:28
中成药(2018年2期)2018-05-09 07:20:09
中国卫生(2015年2期)2015-11-12 13:13:58