相机与运动两坐标系标定的研究
2018-03-16 02:32霍杰崔洁
电子工业专用设备 2018年1期
霍杰,崔洁
(北京中电科电子装备有限公司,北京100176)
1 数码相机定位的原理
目前数码相机的核心成像部件有两种:一种是广泛使用的CCD(电荷藕合)元件;另一种是CMOS(互补金属氧化物半导体)器件。
电荷藕合器件图像传感器CCD(Charge Coupled Device),它使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和设想来修改图像。CCD由许多感光单位组成,通常以百万像素为单位。当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
互补金属氧化物半导体CMOS(Complementary Metal-Oxide Semiconductor)和CCD一样同为数码相机中可记录光线变化的半导体。CMOS的制造技术和一般计算机芯片没什么差别,主要是利用硅和锗这两种元素所制成的半导体,使其在CMOS上共同存在带N(带负电)和P(带正电)级的半导体,这两个互补效应所产生的电流即可被处理芯片纪录和解读成影像。
以上两种数码相机最小感光单位都是像素单元,通过像素单元进行光电转换,并通过模数转换成数字信号将数据传输给计算机,借助计算机处理手段可以进行轮廓定位,反馈轮廓中心在像素阵列中的像素位置(A,B),如图1所示。
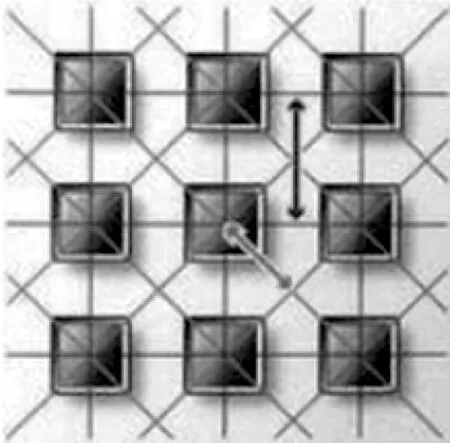
图1 像素点形态
2 对数码相机和运动机构的标定
数码相机定位得出偏差,然后使用运动机构补偿偏差,是设备领域最基本的校正偏差的方法。该方法首先标定运动机构与相机位置关系,假定运动机构位置(CenterPosX,CenterPosY)与相机中心点(CenterA,CenterB)位置重合。数码相机进行定位后得出目标中心在相机坐标系内的位置(PixelA,PixelB)。
在两个坐标系完全平行状态下,相机A向与B向只在对应的运动坐标系X向和Y向上产生影响。两坐标系关系如图2所示。
运动机构坐标系与相机坐标系平行时,将相机坐标系内目标中心(PixelA,PixelB)转换到运动机构坐标系内位置(TargetPosX,TargetPosY)其计算公式1为:

在实际环境下考虑到相机安装情况,难以保证相机坐标系与运动机构坐标系完全平行,当两者存在夹角时,使用上述公式进行计算存在误差。两坐标系关系如图3所示。

图2 运动坐标系与相机坐标系平行状态
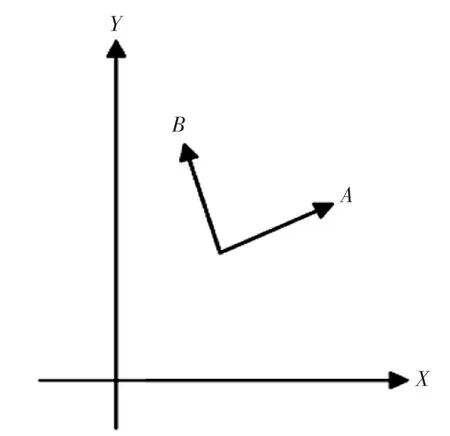
图3 运动坐标系与相机坐标系存在夹角状态
运动机构坐标系与相机坐标系存在夹角时,将相机坐标系内目标中心(PixelA,PixelB)转换到运动机构坐标系内位置(TargetPosX,TargetPosY),
设两坐标系夹角为θ其计算公式(2)为:

公式(2)通过方向分解的办法,将相机坐标系内目标中心与相机中心偏差进行分解,结合两坐标系夹角θ,很容易推论出上述公式。当两坐标系夹角为0°,公式(2)可以简化成公式(1),可见公式(2)包含公式(1),涵盖范围更大。
在实际环境下考虑到运动机构安装情况,难以保证运动坐标系X向与Y向垂直关系,实际情况下两者坐标系关系如图4所示。
运动机构坐标系与相机坐标系实际状态下,将相机坐标系内目标中心(PixelA,PixelB)转换到运动机构坐标系内位置(TargetPosX,TargetPosY),可以将相机坐标系内目标中心与相机中心偏差进行分解,分别分解到运动坐标系X向与Y向上,即目标偏差PixelA在运动坐标系内对X向与Y向同时产生影响,目标偏差PixelB同理,可以得出两个坐标关系计算公式(3):

公式(3)通过方向分解的办法,将相机坐标系内目标中心与相机中心偏差进行分解,最接近真实情况的运动坐标系与相机坐标系之间的关系。当两Kx1=Ky1;Kx2=Ky2时,公式(3)可以简化成公式(2),可见公式(3)包含公式(2),涵盖范围更大,此公式具有普遍适用性。
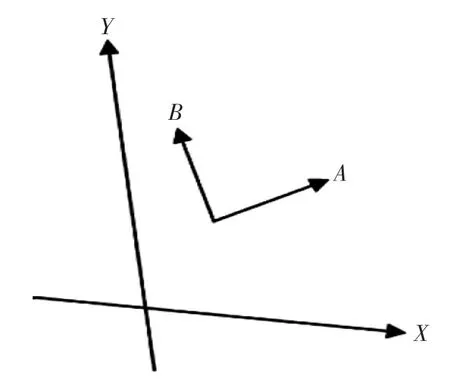
图4 运动坐标系与相机坐标系实际状态
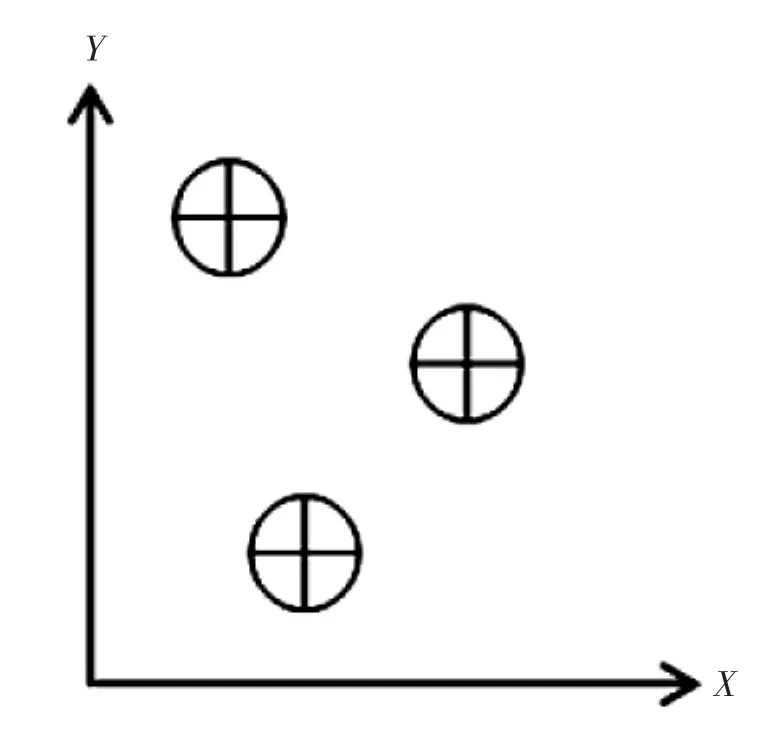
图5 标定板在相机内三个不同位置
3 标定算法的确定
通过下面的标定办法,计算得出公式(3)中的常数系数,进而确定两坐标之间的关系。
公式(3)内单项公式是三元一次方程,通过三组数据即可得出常数系数。在运动机构上安装标定板,通过运动到相机内3个不同位置进行观察,如图5所示。
分别记录运动机构位置(PosX,PosY)和标定板中心与相机中心偏差(OffsetX,OffsetY)。在3个不同位置时记录结果为:(PosX1,PosY1)(PosX2,PosY2)(PosX3,PosY3)(OffsetX1,OffsetY1)(OffsetX2,OffsetY2)(OffsetX3,OffsetY3);
将以上三组结果带入公式(3),可以得出三组方程:

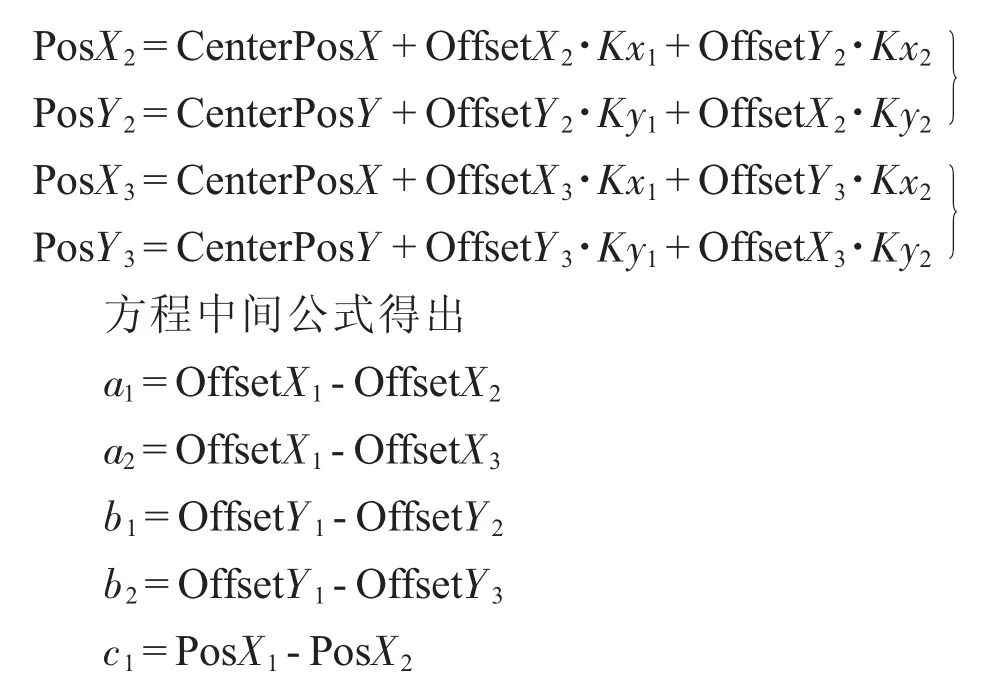
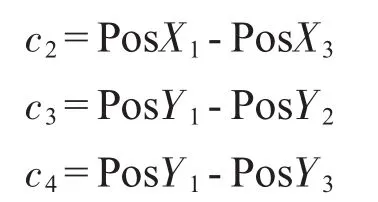
通过上述三组方程可以得出
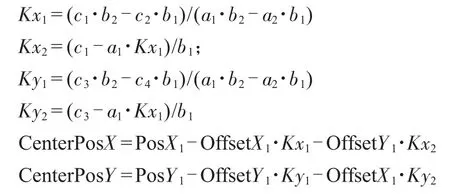
通过上述标定过程可以得出两个坐标系之间的关系,该关系涵盖范围更大,具有普遍适用性。
4 结束语
通过分析相机成像原理以及相机坐标系和运动坐标系的相对关系,得出两者关系公式,最终确定一项通用公式并给出标定方法,该公式符合生产实际情况,通过标定运动机构坐标系与相机坐标系,可以更精准的实现相机定位后运动机构补偿的方法。该方法在设备领域应用很广泛。
[1]吴倩倩,陈彦军,么焕民.数码相机定位问题的数学模型[J].哈尔滨师范大学自然科学学报,2009,(4):10-12.
[2]李明,郑巧仙,冯育强.一种数码相机定位模型的求解算法[J].武汉科技大学学报,2009,(5):557-560.
[3]张吉昕,甄平.数码相机定位系统中系统标定模型[J].黄石理工学院学报,2011,(3):47-50.
猜你喜欢
科学大众(2020年23期)2021-01-18
汽车维修与保养(2020年11期)2020-06-09
中学生数理化·七年级数学人教版(2018年4期)2018-06-28
数学大世界(2018年1期)2018-04-12
小学阅读指南·低年级版(2017年12期)2017-12-26
中国惯性技术学报(2017年1期)2017-06-09
中等数学(2017年2期)2017-06-01
光学精密工程(2016年3期)2016-11-07
西安建筑科技大学学报(自然科学版)(2014年6期)2014-11-10
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28