
推力分配干扰区域处理策略研究
2018-03-16 08:38:12周兴
船电技术 2018年1期
周 兴
推力分配干扰区域处理策略研究
周 兴
(武汉船用电力推进装置研究所,武汉 430064)
动力定位系统船舶的多推进器配置通常存在推进器间水动力干扰的问题,本文从推力优化分配中的权值矩阵考虑,提出一种权值矩阵修正的策略,在不设置推力禁区的条件下,依然可以使推进器避免落在推进器干扰区域内。
动力定位 推力分配 干扰区域 权值矩阵
0 引言
在配备推进器较多的电力推进系统平台或者动力定位船舶上(图1),随着推进器数目的增多,禁区角的区域也会相应的发生变化[1,2]。一个推进器上可能出现两个甚至更多的干扰区。
如果上游推进器都处于工作状态时,则需考虑相应的水动力干扰问题,此时如果直接设定推力禁区角,禁止推进器进入干扰区[3,4],则会极大的缩减推力可行域,造成定位能力的下降[5]。
本文着重从权值矩阵,最小推力等方面解决关于此类情况下的水干扰区域处理方法。
1 权值矩阵对分配结果的影响分析
为充分考虑各方面因素对权值矩阵作用的影响,本节中选用船舶模型如图2。
在船舶模型中包含有四个全回转推进器,两个槽道推进器。推进器布置如图1所示,技术参数见表1。
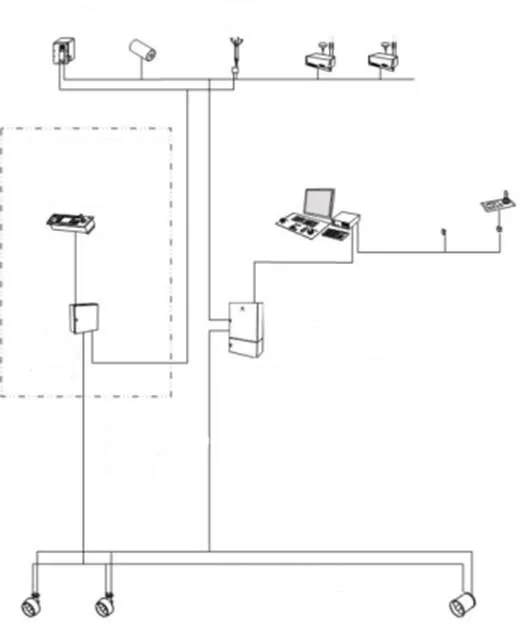
图1 动力定位系统图

选一组典型控制力[1, 8, 0],对权值矩阵中X和Y方向权值分别进行加重处理,进行推力优化分配仿真,研究权值矩阵对分配结果的影响。
从图3仿真结果可知,推进器在经过推力优化分配计算后的角度方向与控制力方向有密切联系。由图3中角度分配结果可以看出,当X方向的控制力与Y方向的控制力的比例远小于1时,受控制力的影响,推进器可容易进入到干扰区内。
当改变权值矩阵内各个推进器Y方向分力对应的权值系数时,对分配结果有较大的影响。选取另一组典型控制力[1, 8, 0],对X方向权值加重进行仿真实验。
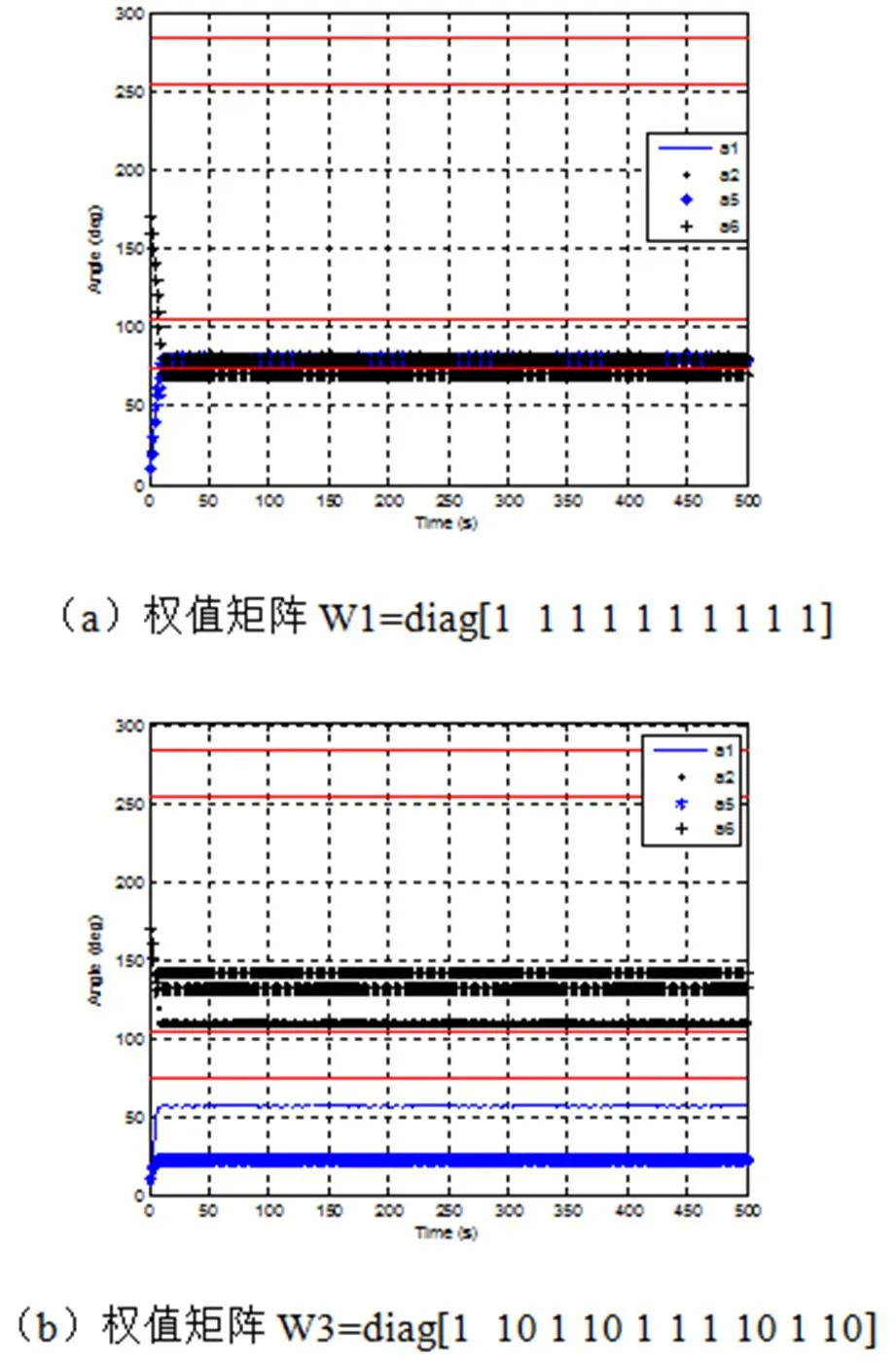
图3 改变Y方向权值全回转推进器角度示意图

图4 改变X方向权值全回转推进器角度示意图
仿真结果图4表明,在改变权值矩阵,即对X方向权值系数进行加重处理后,分配结果中推进器角度基本不发生改变,推进器落在了推力禁区之内。这表明此时权值矩阵的改变并不能较大的影响分配结果。
对仿真数据分析可知,权值系数比例改变,主要影响了由推进器X和Y方向发出推力产生的力矩。当Y方向的正向控制力远大于X方向时,推进器更易朝着正Y方向发力,也更容易使推进器落入禁区内,此时增大权值矩阵中Y方向分力变量对应的权值系数,使得各个推进器在Y方向的发力产生变化,推力的变化导致Y方向产生推力的力矩发生变化,为保证整体力矩输出的定值,X方向的推力产生的力矩相应改变以满足整体力矩的准确输出,相应的X方向的推力发生变化,从而达到改变推进器发力角度以避免推力禁区。
2 权值矩阵处理策略
控制力的合力方向对推进器的角度分配有较大的影响,因此考虑当控制合力方向偏向向坐标轴方向时,通过改变权值系数影响角度分配结果。基于推进器布置的对称性考虑,改变推进器的最小推力以达到避免落入干扰区域的目的,其基本原理如下:

根据以上思想,建立避免干扰区域的策略:
1)判断当前控制周期内推进器角度是否满足不落在禁区且离禁区边界10度(单位周期内推进器能变化达到的最大角度)外的地方,如若满足,则无须处理,输出结果;若推进器角度落在禁区或者靠近干扰区10度内时,进行下面计算:
判断当前控制力的合力方向:
2)计算分别由所有推进器X方向和Y方向分力产生的力矩大小:

a)若满足
权值系数的加重需设上限,如果权值系数任意增加,将影响控制力偏差惩罚项的作用,导致分配结果不准确。修正权值后重新利用二次规划算法进行推力优化分配求解。
4)若计算结果力矩大小满足要求,则停止更新权值系数,输出结果。
若判断配置矩阵在X(Y)方向对称,且则改变推进器的最小推力,将目标函数中的能耗项权值矩阵初始化为单位矩阵,并结合当前对称推进器个数重设优化分配模型中推力下限:
3 仿真结果与分析
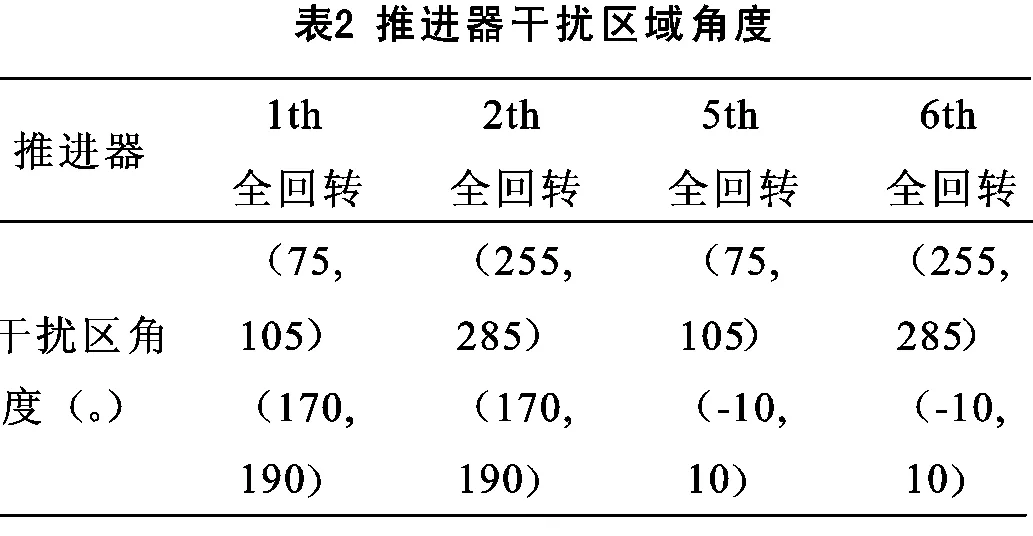
为了验证权值矩阵和最小推力改变对分配结果影响的有效性,利用船舶模型在一组缓变控制力和力矩的要求下进行未处理和处理权值矩阵(最小推力)的推力分配仿真实验,初始权值矩阵选用单位矩阵,推进器的干扰区角度见表2。
仿真结果及分析如下:
(a)
(b)
(c)

(d)
(e)
图5 未处理推力分配分配结果
(a)
(b)

(c)
(d)
(e)
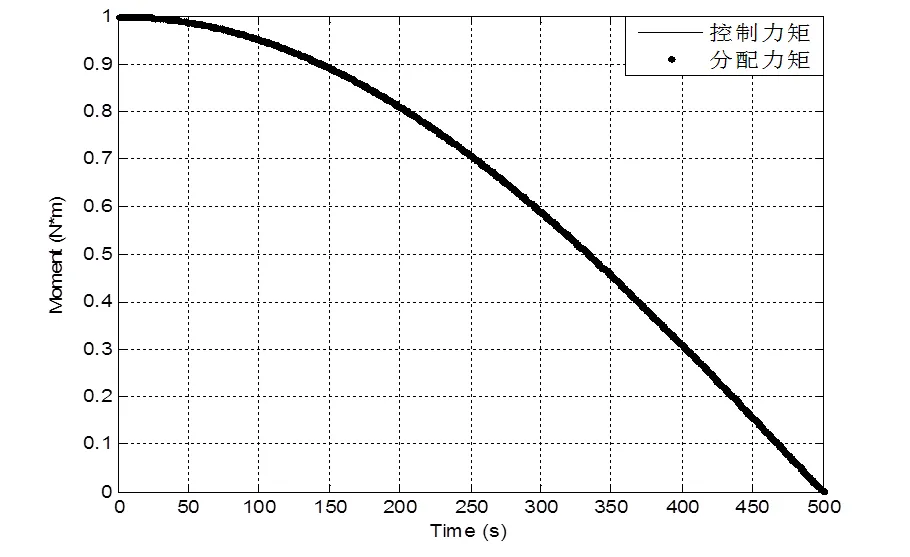
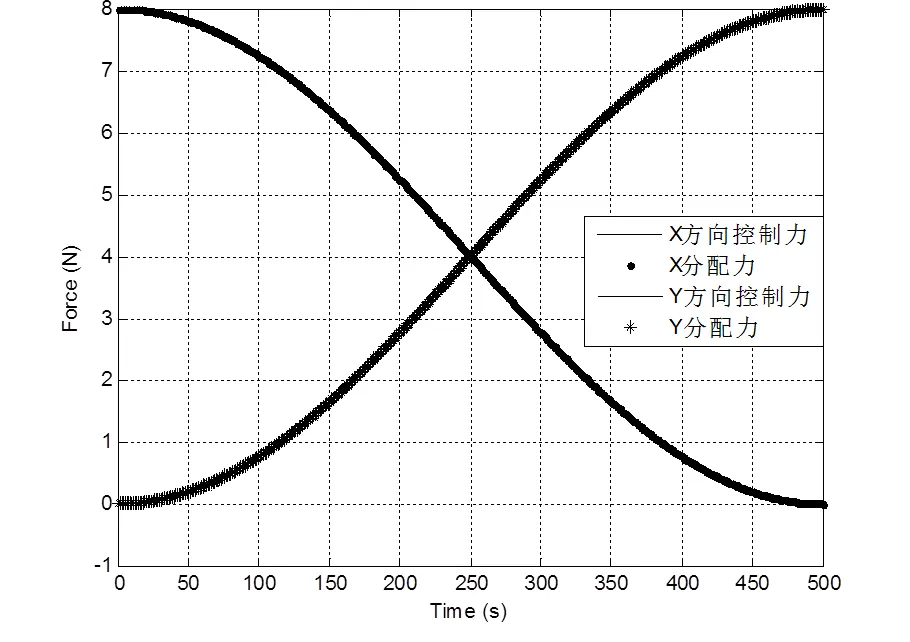
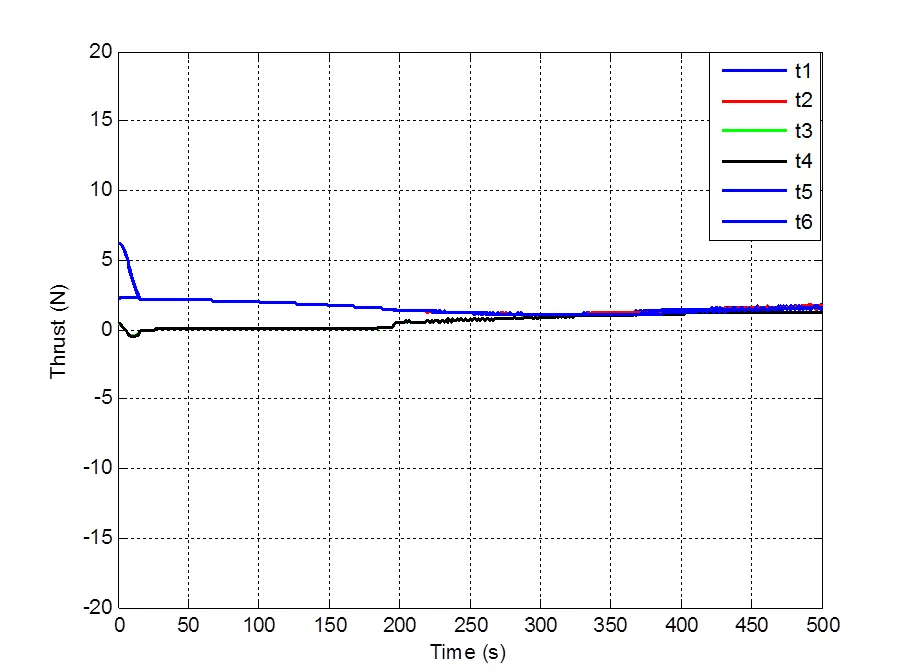
由图5和6中a和b可以看出,未处理前和处理后分配结果都满足控制力和力矩的要求。由图5和6中c可知,经过权值矩阵改变和最小推力处理后的分配结果与未经处理的推进器角度分配结果相比,推进器的角度对比未处理之前,发生了较大的改变。在0-100周期内,未处理分配结果中推进器1和推进器2所处的发力角度会对推进器5和推进器6造成干扰,而在处理后,推进器1和2都有效的避开了发力干扰区;在400~500个周期内也可看到相较处理前,推进器2和6避开了发力干扰区。在0-100个周期内,X方向和Y方向的力矩没有发生变化,此时再X方向推进器布置对称,改变推力的下限值对推进器的角度产生了影响;在400~500周期内,X方向和Y方向的力矩发生了较大的变化,控制力的方向变化导致了Y方向权值因子的加重,推进器都未落在干扰区内,说明了经过权值矩阵加重处理对避免干扰区域的有效性。
4 结束语
本文研究了当一个推进器上存在多个干扰区时改变权值矩阵及最小推力对分配结果的影响,提出了使推进器尽可能避免落在干扰的处理策略。仿真结果说明了避免干扰区的处理方法的有效性。
[1] Millan. Thrust allocation techniques for dynamically positioned vessels[R]. 2008.
[2] 祝庆庆. 海洋工程船推力分配策略[J]. 船舶科学技术, 2013, 35(5): 21-24.
[3] 边信黔, 付明玉, 王元慧. 船舶动力定位[M]. 北京:科学出版社, 2011.
[4] 吴显法, 王言英. 动力定位系统的推力分配策略研究[J]. 船海工程, 2008, 37(3): 92-96.
[5] 许林凯. 动力定位推力分配混合策略研究[D]. 武汉理工大学, 2015.
Research on Handling Strategy of Thrust Allocation Interference Region
Zhou Xing
(Wuhan Institute of Marine Electric Propulsion, Wuhan 430064, China)
U664.3
A
1003-4862(2018)01-0043-05
2017-11-15
周兴(1991-),男,硕士。研究方向:船舶推进系统。
猜你喜欢
小学生学习指导(高年级)(2022年5期)2022-06-02 05:15:58
小学生学习指导(中年级)(2022年5期)2022-06-01 03:16:54
小学生学习指导(低年级)(2022年5期)2022-05-31 08:33:02
辽宁师专学报(自然科学版)(2021年1期)2021-07-21 03:17:00
舰船科学技术(2021年12期)2021-03-29 01:28:38
家庭影院技术(2020年6期)2020-07-27 01:37:50
当代陕西(2018年12期)2018-08-04 05:49:08
海外星云(2016年7期)2016-12-01 04:18:10
学习月刊(2015年10期)2015-07-09 03:35:12
西安交通大学学报(社会科学版)(2015年6期)2015-05-20 07:26:44
