毫米波自动对准系统方位角的优化与实现
2018-03-15 09:13周勇吴艳杨峥
科技视界 2018年1期
周勇 吴艳 杨峥

【摘 要】本文介绍了云台天线自动对准原理,及其系统中参考方位角的作用与意义。对方位角进行了算法实现和C语言编程,并对该方位角在几个象限特殊值处存的计算缺陷,进行了算法上的优化,解决了几个特殊值导致云台天线大幅摇摆,对准错误的情况,进一步完善了云台天线自动对准系统。
【关键词】云台天线自动对准;参考方位角;算法实现;计算缺陷
中图分类号: TN822.4 文献标识码: A 文章编号: 2095-2457(2018)01-0021-002
【Abstract】The design introduces the principle of automatic pan-tilt antenna and the role and significance of reference azimuth in the system. The implementation of the azimuth and C language programming, and the azimuth at several quadrant special value stored in the calculation of defects, the algorithm optimization, to solve a few special value led to a large pan-tilt antenna, the right Quasi-error situation, to further improve the automatic alignment system antenna.
【Key words】Antenna auto-alignment;Reference azimuth;Algorithm implementation;Calculation of defects
0 引言
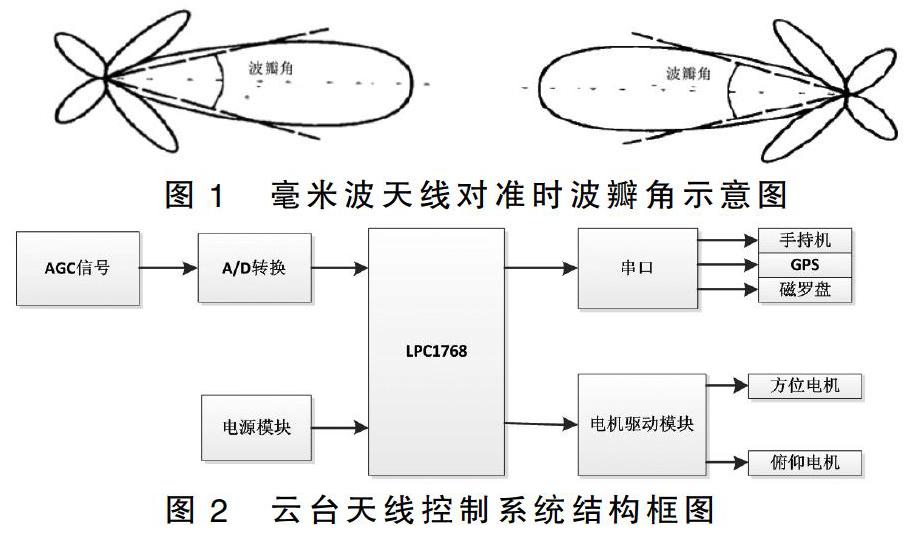
毫米波是一种波长介于1~10毫米的电磁波,由于其具有高频段、传输频带宽、性能稳定等优点,被广泛地应用于通信作战系统中,但由于毫米波瓣窄,副瓣低,使得其在通信天线对准过程中较为困难[1]。毫米波波瓣对准示意图见图1所示。
论文基于毫米波云台天线自动对准控制系统中,一个重要的参考方位角计算中存在着的不足,进行了优良改进。两云台天线若要进行正常通信,需要使两天线达到较高的对准精度,两天线对准是根据两云台天线接收到的AGC反馈电压最大值为依据[2],在两云台天线未对准前,需用单片机控制两台天线,在一定的水平范围内和俯仰范围内进行对准扫描,再不断实时的读取AGC的最大值。若两云台天线都在随意的初始位置开始盲目扫描,这势必导致系统扫描对准时间过长。为了减小扫描时间,在系统初始扫描时加入一个参考方位角,使两天线先运动到一个大致的基准方位上,再进行小范围的水平和俯仰扫描,即可实现云台天线的快速对准。
1 系统硬件结构图
系统中云台天线安装了GPS模块和罗盘模块,分别对云台天线进行位置定位和姿态检测。LPC1768主控单片机,将读取GPS的经纬度数据,并按照参考方位角计算公式,计算出方位角度。并发出相应的角度控制命令,驱动云台电机使两云台天线运动到初始对准扫描位置,图中AGC反馈电压信号为天线自动对准提供对准电压信号。电机驱动模块主要解析单片机的控制命令,并将相应的控制命令转化为相应的角度控制脉冲,驱动方位电机和俯仰电机按要求转动。
2 参考方位角主要算法
根据远程航行器正北夹角的计算原理[3],对系统中的参考方位角计算如下。先给出两个如下定义:
基准方向:把正北方向作为整个云台天线运动的基准方向。
参考方位角:云台天线运动终端所在点到目标点的矢量方向按逆时针方向旋转到基准方向的所转过的角度。
如图3所示,假设本方云台目标点为P(λ,φ),对端云台坐标为PS(λS,φS),其中(λ,φ)为点的经度和纬度。则运动终端将要运动的北向距离为:
对于上述公式中的反正切函数计算,考虑到浮点数据运算量和系统单片机运行内存的大小,对于反正切函数的实现,在系统程序中采用采样数组取值完成。
在后期的工程实践中发现,云台天线在角度趋于几个象限的轴线上时,会出现大幅度摇摆、位置跑偏的情况,不能实现自动对准。经过反复实验和寻找发现单片机在处理dy/dx的时候,当dx趋于零时,不能计算出方位角度值。后期对几个临界值进行优化处理,完善了方位角在整个平面内的计算。经过反复实验得到完善算法前和完善算法后的数据结果如表2和表3。
3 实验结果及分析
经过工程实验,当角度值范围在0 4 结束语 对于本次云台天线设计系统中参考方位角的计算,在几个临界值处存在算法上的不足,并对该缺陷进行了算法上的程序优化。从而保证了云台天线在运动到参考方位角的准确性。 【参考文献】 [1]邹春华.基于ARM的毫米波天线自动对准平台系统云台单元设计[D].成都理工大学,2011. [2]甘仲民.毫米波通信技术与系统[M].电子工业出版社:北京,2003. [3]张博.自主水下航行器组合导航算法研究与系统实现[D].浙江大学,2011. [4]范项媛.无人飞行器的北斗卫星组合导航算法研究[J].网络安全技术与应用,2014(05):5-7. [5]蘇宇.空间非合作目标超近段逼近导航算法研究[D].哈尔滨工业大学,2017. [6]倪友军.基于DSP的伺服电机初始角度测量方法的研究[J].信息系统工程,2017(06):22.