基于无人机多光谱遥感的土壤含水率反演研究
2018-03-13 03:51张智韬王海峰韩文霆陈硕博
农业机械学报 2018年2期
张智韬 王海峰 韩文霆 边 江 陈硕博 崔 婷
(1.西北农林科技大学水利与建筑工程学院, 陕西杨凌 712100; 2.西北农林科技大学旱区农业水土工程教育部重点实验室,陕西杨凌 712100; 3.西北农林科技大学水土保持研究所, 陕西杨凌 712100)
0 引言
土壤含水率作为农作物墒情监测和判断的一个重要指标,对其进行实时、准确的监测,有利于提升农作物灌溉管理水平和提高水资源利用效率,促进农业节水灌溉的进一步发展,也可以进一步研究地表能量在显热和潜热分配以及水循环等方面的问题[1]。目前,传统的卫星遥感监测技术在一定程度上实现了对土壤墒情的大面积快速监测[2-5],但仍存在时效性差、成本高、精度较低等问题。而灵活性高、成本低、操作简便的无人机与遥感技术相结合[6],即无人机遥感(UAV remote sensing, UAVRS),弥补了传统卫星遥感时效性差的不足,并具有分辨率高和抗干扰性强的优点[7-8],为精准农业的进一步发展提供了技术支持。
国外学者在农用无人机遥感应用方面起步较早,并已取得了显著的成果。MARTINEZ等[9]、HOFFMANN等[10-11]利用无人机热红外成像仪,准确获取了田间作物的冠层温度,从而由作物水分胁迫指数反演土壤含水率,并对田间蒸散发进行了有效的评估。HASSAN-ESFAHANI等[12]对机载高光谱相机获得的遥感数据进行人工神经网络算法,精确反演了土壤表层含水率(相关系数达到0.88)。ACEVO-HERRERA等[13]通过开发一种基于L波段的机载辐射计,将土壤含水率的反演误差限制在1%~6%之间。GAMBA等[14]研制了一种抗干扰性更强的无人机GNSS雷达,并将其应用到农情监测。MATESE等[15]在无人机遥感农业经济适用性评估方面进行了细致的对比工作。国内近几年来,通过无人机搭载高光谱相机[16-18]、多光谱相机[19-20]、热红外相机[21-22]和可见光相机[23-25],在农情监测和信息提取方面已取得较多的成果。但目前基于无人机遥感对裸土土壤含水率和最佳监测深度的研究还未见报道,缺乏无人机遥感对土壤含水率的反演预测模型。
本文以关中平原杨凌地区为研究区域,通过野外土壤采样、室内理化分析、光谱采集与处理等一系列工作,尝试对土壤6个波段反射率与含水率之间建立不同的回归方程,分析不同回归方程与土壤含水率的相关性,并对模型进行精度评定,得出反演土壤含水率的最佳回归方法和最佳监测深度。
1 试验材料与方法
1.1 研究区概况
试验在西北农林科技大学旱区农业水土工程教育部重点实验室的灌溉试验站(108°24′E,34°18′N,海拔521 m)进行。试验站位于陕西省关中平原的杨凌区,该地区地处暖温带,属大陆性季风气候,年平均气温在10℃左右,多年平均降雨量为663 mm,年均蒸发量884 mm。土壤类型为典型的塿土。
1.2 试验材料
试验土壤取自杨凌渭河三级阶地,在0~30 cm均匀采样后用塑料袋密封带回实验室供试。测得土壤容重为1.36 g/cm3,初始质量含水率为13.5%,pH值7.46,有机质含量10 g/kg,含盐量0.52 g/kg。为使试验样品水分含量精确配置,将采样土壤晒干、碾压、混合后过2 mm筛网制成试验土样。充分混匀后装入直径约16 cm,高度约11 cm的花盆中,配成质量含水率θp为3%~30%、梯度约为3%、高度分别为5 cm和10 cm的样品共60个。配好后用精度为0.01 g的电子秤称取并记录每一个花盆土壤样本的质量。将含水率梯度依次递减的土样进行编号为1~10。其中随机选取2/3的样本为建模集,1/3的样本为验证集。密封放置24 h,使水分在土壤中均匀扩散。
1.3 数据获取
试验在2017年3月29日、3月30日、3月31日于田间空地进行,试验现场如图1所示。用深圳市大疆创新科技有限公司生产的经纬M600型多旋翼无人机,搭载美国Tetracam公司生产的Micro-MCA型多光谱相机(每个波段配备1.3M像素CMOS传感器,每张图像分辨率为1 280像素×1 024像素),如图2所示,共采集6种不同波长土样光谱:490 nm(蓝光)、550 nm(绿光)、680 nm(红光)、720 nm(近红外)、800 nm(近红外)、900 nm(近红外)。飞行高度经多次试飞后选定为6 m,拍摄时间选为15:00,每次拍摄前操控无人机飞至土样上方悬停5~10 s,待机身稳定后进行拍摄,保证获取图像的质量,图3为获取的多光谱影像。采集光谱前用标准白板进行标定,每次试验均进行3~4次,对光谱进行算术平均以减小随机误差。每次拍摄完成后,立即通过称量法来计算每一个花盆土样的整体质量含水率θw。称量后取每个花盆土样的表层土(深度约1 cm)30 g左右装入铝盒带回实验室,在105℃、24 h恒温条件下用干燥法测得表层土质量含水率θm。θm的计算式为

(1)
式中W1——湿土加铝盒质量
W2——干土加铝盒质量
W3——空铝盒质量

图1 无人机拍摄试验现场Fig.1 Unmanned aerial vehicle shooting test site

图2 无人机及多光谱相机Fig.2 Unmanned aerial vehicle and multispectral camera

图3 土样R、G、B波段合成的真彩色影像Fig.3 Real color images synthesized using R, G, and B bands of soil samples
1.4 遥感图像预处理与波段反射率提取
将无人机获得的遥感图像通过相机自带的PixelWrench2软件进行预处理,先把拍摄的6个波段散乱的原始RAW遥感图像在软件中进行合成,合成得到多页TIF格式的图片,再通过Tif Export Tool将其转换为单页TIF格式。将处理好的图像输入到图像处理软件ENVI5.1中进一步处理,先进行兴趣区(Region of interest, ROI)的构建,再根据花盆的边缘阴影适当调整ROI的大小,避免受到阴影的影响,如图4所示。因为在光谱采集过程中不可避免地受到测试环境、仪器本身、杂散光等因素的影响,所以以ROI范围内土样的平均反射光谱作为该土样的反射光谱来减小随机误差,以保证获取光谱反射的准确性。根据标准白板(反射率100%)的光谱计算得到各花盆土样6个波段处的光谱反射率。
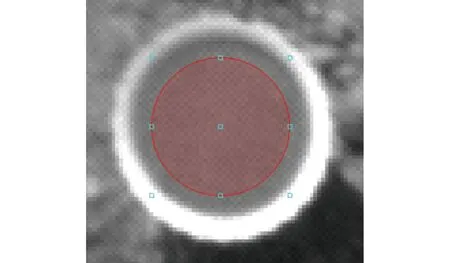
图4 花盆土样兴趣区ROI的构建Fig.4 Construction of interest area ROI of flowerpot soil sample
1.5 回归方法
由于常规的最小二乘回归法难以克服变量间的多重共线性,而各土壤反射波段间可能存在共线性,所以采用具有较好鲁棒性[26]的偏最小二乘法。同时考虑到在6个波段中,土壤含水率的变化对有些波段影响较强,对有些波段影响较弱,所以采用逐步回归法对6个波段变量集进行筛选,从中选出最优回归子集,变量入选和剔除的显著水平分别设为0.10和0.15,从而可以选出最主要的影响因素[27-28]。岭回归方法是1970年HOERL和KENNARD针对最小二乘法估计回归系数时无法解决正规方程组系数矩阵奇异的情况而提出的,是一种改进的最小二乘估计。同时,通过剔除岭迹图上标准化回归系数较稳定且绝对值很小的自变量、岭回归系数不稳定且趋于零的自变量以及岭回归系数很不稳定的自变量,从而实现选择变量,消减波段之间相关性的目的[29-30]。所以,研究分别采用偏最小二乘回归、逐步回归和岭回归方法,建立土壤4组含水率与6个波段反射率的回归模型,并对模型进行精度分析。
2 结果与分析
2.1 土壤含水率与多波段光谱特征分析
对不同深度,同一含水率梯度下的土样光谱反射率取平均,获得3 d内土样光谱反射率随含水率的变化曲线如图5所示,其中波段1~6分别对应波长为490、550、680、720、800、900 nm的6个波段。

图5 土样光谱反射率随含水率变化关系曲线Fig.5 Relationship curves of soil spectral reflectance with moisture content
由图5可以看出,每天15:00的土壤光谱反射率均随着含水率梯度减小而增大,6个波段反射率在3月29日、3月30日和3月31日的最大变化幅度分别在0.14~0.27、0.13~0.28和0.10~0.18之间。并且随着土壤含水率的下降,各个波段的最低反射率均有一定的上升,同时各波段反射率变幅也在减小。波段3(红光波段)和波段1(蓝光波段)的反射率在各含水率梯度下均为最高和最低。这与一些成果理论相符合[31-33]。
2.2 多重共线性分析
多元回归分析方法是处理多变量间相依关系的统计方法,在数理统计领域中有着广泛的应用。但在实际应用中,若忽视自变量间的近似线性关系则可能会使得回归方程不稳定,有些自变量对因变量影响的显著性被隐蔽起来,某些回归系数的符号与实际意义不相符合等[34-35]。所以在将6个波段反射率因素与土壤湿度进行多元回归分析前,有必要对各个波段之间进行共线性诊断,选用相关系数矩阵和方差膨胀因子(VIF)两种方法来综合评估6个波段之间线性关系的强弱。
2.2.1相关系数矩阵
通过统计分析软件SPSS 22.0对厚度为5 cm和10 cm的花盆土样采集的光谱反射率数据分别进行相关系数矩阵分析,结果见表1和表2。
当2个变量的相关系数R越接近于1时,2个变量间的线性关系越强。其中,相关系数超过0.9的变量在分析时将会存在共线性问题,在0.8以上可能会有问题[35]。这种方法简单直观,但只能对共线性作初步的判断,并不全面,并且仅限于判断2个变量间的共线性问题,对多个变量间的共线性关系无能为力。由相关系数矩阵可以很直观地看出,6个波段之间的相关系数R绝大部分都大于0.8,可以证明6个波段之间有较强的共线性,为进一步说明共线性问题,采用方差膨胀因子VIF来表征其严重性。
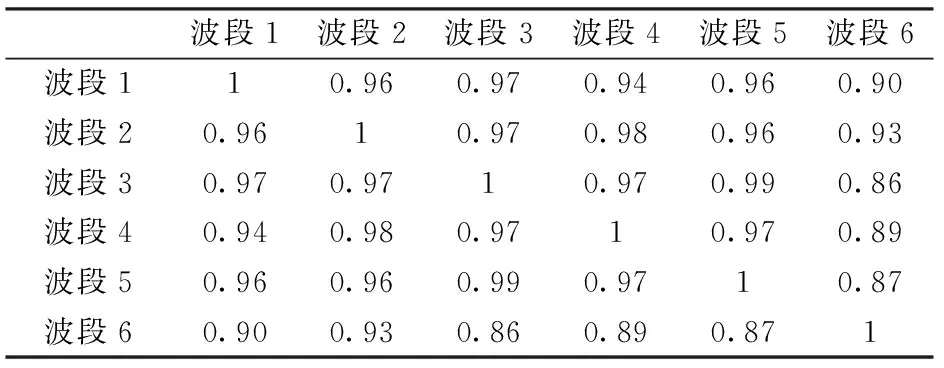
表1 5 cm厚度花盆土样光谱相关系数矩阵Tab.1 Spectral correlation coefficient matrix of 5 cm thickness flowerpot soil sample

表2 10 cm厚度花盆土样光谱相关系数矩阵Tab.2 Spectral correlation coefficient matrix of 10 cm thickness flowerpot soil sample
2.2.2方差膨胀因子
通过统计分析软件SPSS 22.0对2种土样的光谱反射率数据进行方差膨胀因子分析,结果见表3。

表3 花盆土样光谱方差膨胀因子VIF统计Tab.3 Spectral variance expansion factor VIF statistics of flowerpot soil samples
一般建议,当某个自变量的VIF大于10时,则表明该变量与其他自变量间有很强的共线性问题[35],所以由方差膨胀因子VIF统计表中可以明显得出,只有10 cm深度第6波段的VIF小于10,其他波段的VIF都远大于10。所以进一步说明了6个波段间具有严重的多重共线性问题。在本研究中,若采用最小二乘法建立回归模型,则严重的共线性问题会使回归系数的估计值对样本数据的微小变化变得异常敏感,使得模型稳定性变得很差。同时,回归模型的预测精度也会大大降低。所以为了消除多重共线性给回归模型带来的不良影响,本研究采用了3种可以有效解决多重共线性问题的回归方法:偏最小二乘法、逐步回归法和岭回归法。
2.3 回归模型
采用SPSS 22.0和DPS 7.05统计分析软件,以3月29日—31日3 d采集数据中的2/3样本进行回归建模,1/3样本用来验证模型的精度。其中5 cm深度和10 cm深度的花盆土样每个含水率均为60个样本建模,30个样本验证(表4)。3种回归模型、相关系数和检验值如表5所示。
由表5可以得出,3种回归模型在反演4种花盆土壤含水率拟合方程的显著性检验都具有统计学意义(P<0.01),且均表现为极显著。但是不同的回归模型表现出了一定的差异。其中,逐步回归模型决定系数高于其他2种模型。对偏最小二乘法和岭回归法进行比较得出,在反演表层含水率时,岭回归法的决定系数较高,但在反演整体含水率时,偏最小二乘法的效果较好。所以在反演不同深度的土壤含水率时,2种方法各有优处。
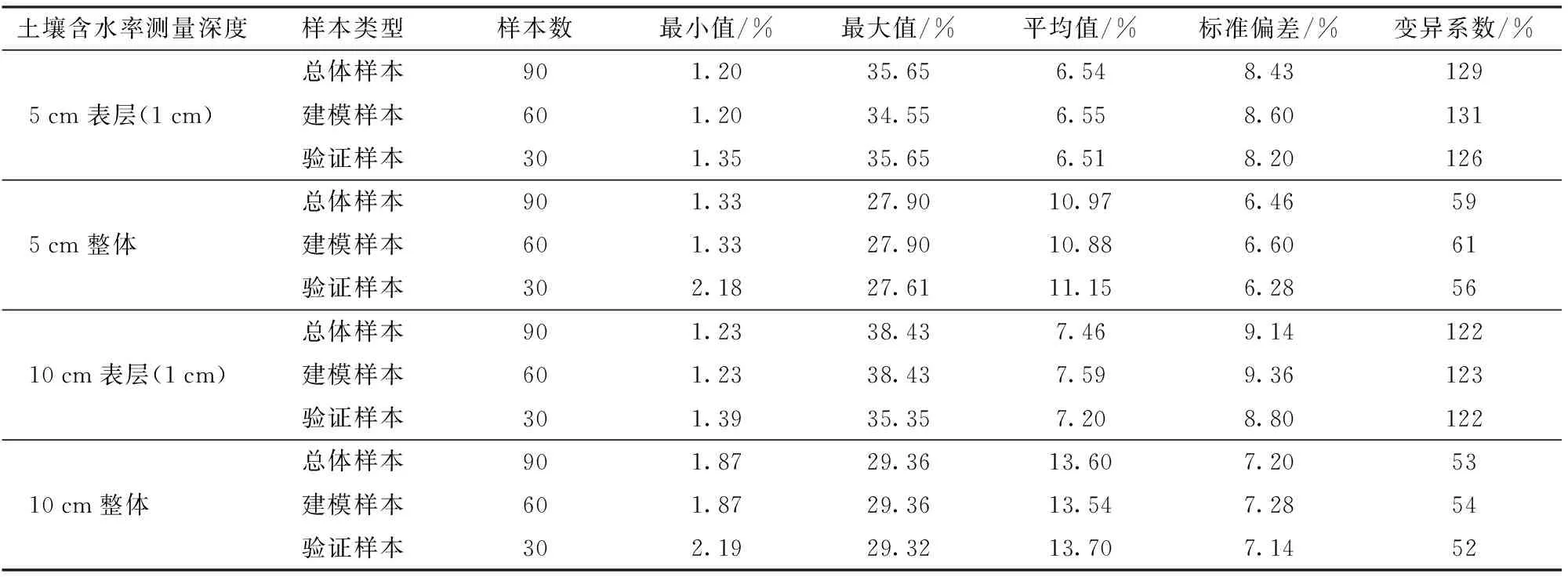
表4 土壤含水率统计特征Tab.4 Statistical characteristics of soil moisture content

表5 不同波段反射率因素的3种回归模型结果Tab.5 Results of three regression models of different band reflectivity factors
注:Y为土壤质量含水率;X1为波段1反射率;X2为波段2反射率;X3为波段3反射率;X4为波段4反射率;X5为波段5反射率;X6为波段6反射率。
通过比较不同方法对土样表层和整体含水率的反演结果发现,对土样表层含水率的反演效果明显优于整体含水率(决定系数R2提高6%~21%)。所以,通过无人机多光谱遥感技术对土壤含水率的最佳监测深度约为表层1 cm。对土样深度为5 cm和10 cm的整体含水率反演结果分析,回归模型R2虽有一定下降,但均大于0.68(达到强相关性)。对于无人机多光谱遥感技术对5 cm和10 cm深度的土壤含水率监测仍具有一定的可行性。
分析表5中逐步回归法4个拟合方程发现,对于2种深度花盆土的表层土含水率拟合中,波段2、3、4均通过了显著性水平α为0.15的筛选,表现出了对表层土壤含水率的高度显著相关性。而对于整体含水率反演效果来看,波段2、3未全部通过显著性检验,筛选结果表明,波段4对整体含水率有较高的相关性。在岭回归法拟合过程中,发现在反演两种表层土含水率的岭迹图中,波段1的标准化岭回归系数较稳定且绝对值很小,所以予以剔除,同时对其余不符合岭回归选择波长原则的波段也进行剔除[31-32]。保留下来岭估计基本稳定的波段2、3、4。在对两种深度的整体土壤含水率拟合过程中,剔除掉了岭回归系数较小且趋于零的波段5和6,保留下来波段1、2、3、4进行方程拟合。经岭回归分析得出,波段2、3、4在反演土壤含水率中有最为显著的效果。综合表5中逐步回归法和岭回归法得到的结果,可以得出在反演不同深度的土壤含水率方面,波段4(近红外波段,波长为720 nm)作用最为显著,其次为波段3(红光,680 nm)和波段2(绿光,550 nm)。而波段1、5、6的作用不显著。
2.4 模型验证分析
将验证集代入3种回归方程中,对回归模型进行验证和精度评定,比较3种模型在反演不同深度的土壤含水率效果。为评定模型预测效果,通过实测值与预测值计算3种模型的决定系数(R2)、均方根误差(RMSE)和相对分析误差(RPD),计算公式为
(2)
(3)
式中yi——土壤含水率模型预测值
n——模型检验样本的个数
yRMSE——土壤含水率模型的均方根误差
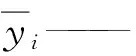
当相对分析误差在2.5以上时,表明模型具有极好的预测能力;当相对分析误差在2.0~2.5时,表明模型具有很好的定量预测能力;当相对分析误差在1.8~2.0时,表明模型具有较好的定量预测能力;当相对分析误差在1.4~1.8时,表明模型具有定量预测能力;当相对分析误差在1.0~1.4时,表明模型具有区别高值和低值的能力;当相对分析误差小于1.0时,表明模型不具备预测能力[36]。验证结果见表6。
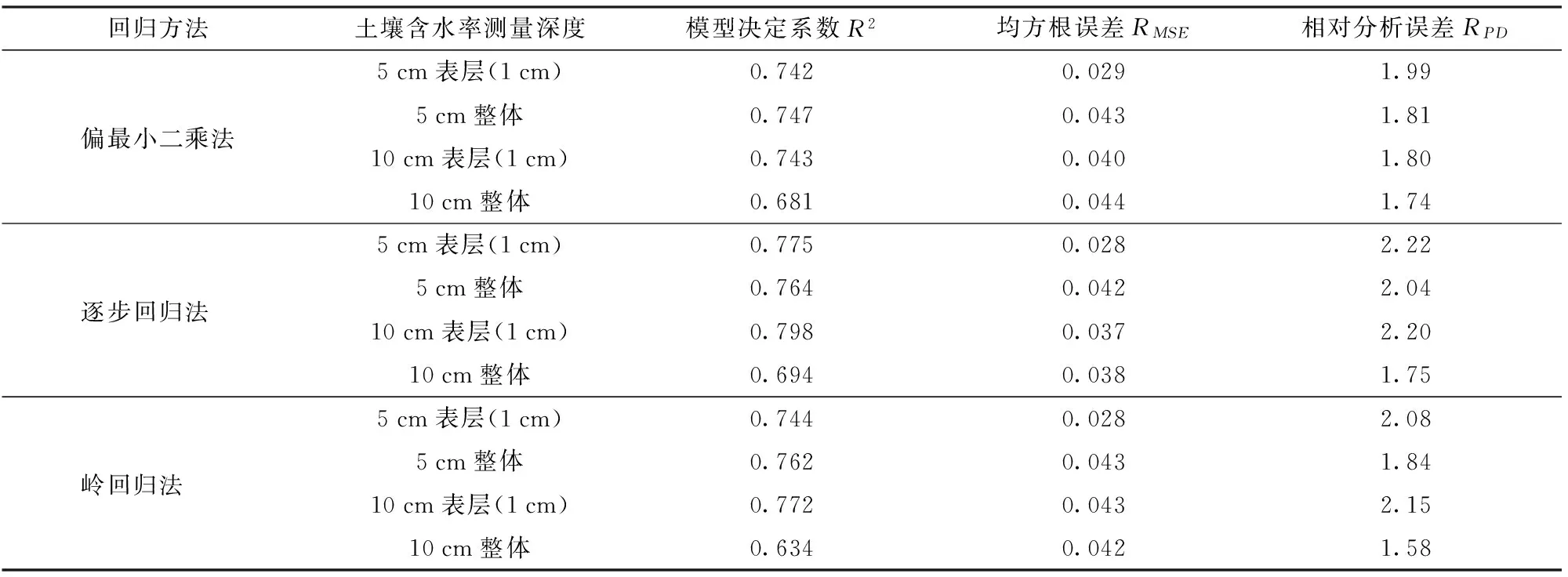
表6 不同建模方法下土壤含水率的预测值与实测值比较Tab.6 Comparison of predicted and measured soil moisture contents under different modeling methods
由表6对3种建模方法下不同深度土壤含水率的预测值与实际值进行比较分析得出,逐步回归的模型决定系数最高,均方根误差RMSE最小,相对分析误差RPD最高(在反演10 cm深度的土壤整体含水率时的预测能力较差,对其余几种含水率均有很好的定量预测能力)。对其余两种模型分析得到,在反演10 cm深度的土壤整体含水率时,偏最小二乘回归模型的预测效果优于岭回归模型,但在其余3种土壤含水率反演中,岭回归模型具有更好的预测能力,精度与逐步回归模型相近。其中在2种表层含水率的反演中,岭回归模型的RPD大于2,具备很好的预测能力。偏最小二乘回归模型的R2和RPD虽较低,但均方根误差RMSE均在0.1以下,说明偏最小二乘回归模型仍具有一定的预测能力。
比较不同回归模型对土样表层和整体含水率的预测结果得出,对表层含水率均有较好的预测能力(RPD≥1.8),且模型决定系数R2较高(R2>0.7),均方根误差RMSE均在0.05以下。对整体含水率的预测效果略有下降(RPD>1.5),模型决定系数R2和均方根误差RMSE均在合理范围内。所以模型对5 cm和10 cm深度土壤含水率的预测也是可行的。
综合表6中对土壤含水率的各项预测精度评价指标得出,逐步回归模型预测效果最佳,其次为岭回归模型,偏最小二乘回归模型的预测效果最差。回归模型对土样含水率的最佳预测深度约为1 cm表层,对5 cm和10 cm深度的土样含水率仍具有一定的预测能力。
3 讨论
通过以上研究结果表明,土壤光谱反射率与土壤含水率之间存在较好的相关性,其建模集和预测集反演效果的决定系数R2最高分别可达0.833和0.798。对通过无人机遥感技术实现农田墒情的快速监测技术提供了一定的理论支持。同时,通过回归模型对2种不同深度的土壤含水率反演的结果分析,得出在可见光(490 nm)-近红外(900 nm)波段反演土壤含水率中,土壤表层(约1 cm)为最佳监测深度,其回归模型决定系数R2大部分在0.8以上。而在2种不同深度的土壤整体含水率反演中,回归模型的效果均有一定的下降,但决定系数R2仍在0.68以上。通过统计学理论分析得知,3种回归模型在反演2种不同深度的土壤含水率时,模型的拟合效果均可以达到强相关性。对以后应用遥感估算土壤含水率的最佳深度有一定的认知,同时在无人机多光谱遥感应用于区域大面积墒情监测方面有一定的参考价值。由于试验考虑的土壤含水率深度不够全面,仍需要进行更多不同深度的反演对比试验,确定通过多光谱技术反演土壤含水率的深度阈值。
采用了偏最小二乘法、逐步回归法和岭回归法3种不同的多元回归方法对6个波段发射率进行分析得出,逐步回归法和岭回归法均对多个波段进行了一定的筛选,对模型的简化和冗余数据的剔除起到了很大的作用。从模型拟合效果来看,逐步回归方程的决定系数R2均高于岭回归方程,并由于岭回归法在岭估计剔除变量的过程中,存在着一定的主观人为性,且操作过程较为繁杂。所以降低了模型的便捷性和稳定性。而偏最小二乘回归模型从原理上对模型的共线性起到了一定的消除作用,但没有对数据进行筛选,故模型的计算效率较低。综合考虑得出,逐步回归法具有模型简单、运算量小、变量较少的优点,不仅节省了建模时间,筛选出了显著性波段,同时运算过程也更快速。
4 结论
(1)通过对采集到的6个波段多光谱数据进行共线性分析得知,其相关系数大部分在0.8以上且方差膨胀因子大部分在10以上,均表明了波段之间具有很强的共线性。由于共线性作用会严重影响传统的最小二乘法回归结果,所以采取可以消除共线性影响的偏最小二乘法、逐步回归法和岭回归法进行回归分析。
(2)3种回归方法中,逐步回归模型拟合精度和预测精度均为最高。而偏最小二乘回归模型和岭回归模型在拟合不同深度土样含水率时各有优点,岭回归模型的预测效果更理想。所以逐步回归法最优,岭回归法次之,偏最小二乘法最差。同时,由于逐步回归模型应用的简便性和快速性,在今后实际应用中可优先采用逐步回归模型预测土壤含水率。
(3)比较3种回归模型在对2种不同深度土样的表层和整体含水率反演中发现,通过已有的可见光-短波近红外波段,可以实现对深度大约为1 cm的表层土壤含水率的精确反演,而随着土壤深度的增加,反演精度也随之下降。
(4)通过逐步回归法和岭回归法的波段筛选作用分析中发现,与土壤含水率最显著的波段为波长720 nm的近红外波段,其次为波长680 nm的红光波段和波长550 nm的绿光波段。波长490 nm的蓝光波段和波长800 nm的近红外波段较为显著,波长900 nm的近红外波段不显著。
1 陈仲新,任建强,唐华俊,等. 农业遥感研究应用进展与展望[J]. 遥感学报, 2016, 20(5): 748-767.
CHEN Zhongxin,REN Jianqiang,TANG Huajun,et al. Progress and perspectives on agricultural remote sensing research and applications in China[J]. Journal of Remote Sensing, 2016, 20(5): 748-767. (in Chinese)
2 刘兴文,冯勇进. 应用热惯里编制土壤水分图及土壤水分探测效果[J]. 土壤学报, 1987, 24(8): 272-280.
LIU Xingwen,FENG Yongjin. Compilation of soil moisture map by means of soil thermal inertia image[J]. Acta Pedologica Sinica, 1987, 24(8): 272-280. (in Chinese)
3 戴昌达. 低湿地与土壤湿度的卫星遥感监测与制图[J]. 土壤学报, 1995, 32(4): 377-382.
DAI Changda. Monitoring and mapping of wetlands and soil moisture by satellite remote sensing[J]. Acta Pedologica Sinica, 1995, 32(4): 377-382. (in Chinese)
4 张智韬,李援农,杨江涛,等. 遥感监测土壤含水率模型及精度分析[J]. 农业工程学报, 2008, 24(8): 152-156.
ZHANG Zhitao,LI Yuannong,YANG Jiangtao,et al. Model for monitoring soil moisture using remote sensing and its accuracy analysis[J]. Transactions of the CSAE, 2008, 24(8): 152-156. (in Chinese)
5 陈涛,卓嘎,拉巴. 那曲东部土壤水分MODIS遥感反演研究[J]. 土壤通报, 2017, 48(2): 298-303.
CHEN Tao,ZHUO Ga,LA Ba. Study on soil moisture by remote sensing retrieval based on MODIS data in Eastern Naqu [J]. Chinese Journal of Soil Science, 2017, 48(2): 298-303. (in Chinese)
6 金伟,葛宏立,杜华强,等. 无人机遥感发展与应用概况[J]. 遥感信息, 2009(1): 88-92.
JIN Wei,GE Hongli,DU Huaqiang,et al. A review on unmanned aerial vehicle remote sensing and its application[J]. Remote Sensing Information, 2009(1): 88-92. (in Chinese)
7 李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报: 信息科学版, 2014, 39(5): 505-513.
LI Deren,LI Ming. Research advance and application prospect of unmanned aerial vehicle remote sensing system[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513. (in Chinese)
8 史舟,梁宗正,杨媛媛,等. 农业遥感研究现状与展望[J/OL]. 农业机械学报, 2015, 46(2): 247-260. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20150237&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2015.02.037.
SHI Zhou,LIANG Zongzheng,YANG Yuanyuan,et al. Status and prospect of agricultural remote sensing[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(2): 247-260. (in Chinese)
9 MARTINEZ J, EGEA G, AGUERA J, et al. A cost-effective canopy temperature measurement system for precision agriculture: a case study on sugar beet[J]. Precision Agriculture, 2017, 18(1): 95-110.
10 HOFFMANN H, JENSEN R, THOMSEN A, et al. Crop water stress maps for an entire growing season from visible and thermal UAV imagery[J]. Biogeosciences, 2016,13(24): 6545-6563.
11 HOFFMANN H, NIETO H, JENSEN R, et al. Estimating evaporation with thermal UAV data and two-source energy balance models[J]. Hydrology and Earth System Sciences, 2016,20(2): 697-713.
12 HASSAN-ESFAHANI L, TORRES-RUA A, JENSEN A, et al. Assessment of surface soil moisture using high-resolution multi-spectral imagery and artificial neural networks[J]. Remote Sensing, 2015, 7(3): 2627-2646.
13 ACEVO-HERRERA R, AGUASCA A, BOSCH-LLUIS X, et al. Design and first results of an UAV-borne L-band radiometer for multiple monitoring purposes[J]. Remote Sensing, 2010, 2(7): 1662-1679.
14 GAMBA M, MARUCCO G, PINI M, et al. Prototyping a GNSS-based passive radar for UAVs: an instrument to classify the water content feature of lands[J]. Sensors, 2015, 15(11): 28287-28313.
15 MATESE A, TOSCANO P, Di GENNARO S F, et al. Intercomparison of UAV, aircraft and satellite remote sensing platforms for precision viticulture[J]. Remote Sensing, 2015,7(3): 2971-2990.
16 高林,杨贵军,于海洋,等. 基于无人机高光谱遥感的冬小麦叶面积指数反演[J]. 农业工程学报, 2016, 32(22): 113-120.
GAO Lin,YANG Guijun,YU Haiyang,et al. Retrieving winter wheat leaf area index based on unmanned aerial vehicle hyperspectral remote sensing[J]. Transactions of the CSAE, 2016, 32(22): 113-120. (in Chinese)
17 赵晓庆,杨贵军,刘建刚,等. 基于无人机载高光谱空间尺度优化的大豆育种产量估算[J]. 农业工程学报, 2017, 33(1): 110-116.
ZHAO Xiaoqing,YANG Guijun,LIU Jian’gang,et al. Estimation of soybean breeding yield based on optimization of spatial scale of UAV hyperspectral image[J]. Transactions of the CSAE, 2017, 33(1): 110-116. (in Chinese)
18 刘焕军,康苒,SUSAN U,等. 基于时间序列高光谱遥感影像的田块尺度作物产量预测[J]. 光谱学与光谱分析,2016, 36(8): 2585-2589.
LIU Huanjun,KANG Ran,SUSAN U,et al. Study on the prediction of cotton yield within field scale with time series hyperspectral imagery[J]. Spectroscopy and Spectral Analysis, 2016, 36(8): 2585-2589. (in Chinese)
19 李冰,刘镕源,刘素红,等. 基于低空无人机遥感的冬小麦覆盖度变化监测[J]. 农业工程学报, 2012, 28(13): 160-165.
LI Bing,LIU Rongyuan,LIU Suhong,et al. Monitoring vegetation coverage variation of winter wheat by low-altitude UAV remote sensing system[J]. Transactions of the CSAE, 2012, 28(13): 160-165. (in Chinese)
20 韩文霆,张立元,张海鑫,等. 基于无人机遥感与面向对象法的田间渠系分布信息提取[J/OL]. 农业机械学报, 2017, 48(3): 205-214. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170326&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2017.03.026.
HAN Wenting,ZHANG Liyuan,ZHANG Haixin,et al. Extraction method of sublateral canal distribution information based on UAV remote sensing[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 205-214. (in Chinese)
21 鱼自强. 无人机近红外数据处理方法研究[D]. 北京:中国地质大学, 2015.
YU Ziqiang. Processing method research on unmanned aerial vehicle near infrared data[D]. Beijing: China University of Geosciences, 2015. (in Chinese)
22 鱼自强,支晓栋,周萍,等. 无人机近红外遥感初探[J]. 测绘科学, 2015, 40(10): 74-78.
YU Ziqiang,ZHI Xiaodong,ZHOU Ping,et al. Preliminary study about near infrared remote sensing based on unmanned aerial vehicle[J]. Science of Surveying and Mapping, 2015, 40(10): 74-78. (in Chinese)
23 王利民,刘佳,杨玲波,等. 基于无人机影像的农情遥感监测应用[J]. 农业工程学报, 2013, 29(18): 136-145.
WANG Limin,LIU Jia,YANG Lingbo,et al. Applications of unmanned aerial vehicle images on agricultural remote sensing monitoring[J]. Transactions of the CSAE, 2013, 29(18): 136-145. (in Chinese)
24 韩文霆,郭聪聪,张立元,等. 基于无人机遥感的灌区土地利用与覆被分类方法[J/OL]. 农业机械学报, 2016, 47(11): 270-277. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20161137&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2016.11.037.
HAN Wenting,GUO Congcong,ZHANG Liyuan,et al. Classification method of land cover and irrigated farm land use based on UAV remote sensing in irrigation[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(11): 270-277. (in Chinese)
25 韩文霆,李广,苑梦婵,等. 基于无人机遥感技术的玉米种植信息提取方法研究[J/OL]. 农业机械学报, 2017, 48(1): 139-147. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170118&journal_id=jcsam. DOI: 10.6041/j.issn.1000-1298.2017.01.018.
HAN Wenting,LI Guang,YUAN Mengchan,et al. Extraction method of maize planting information based on UAV remote sensing techonology[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(1): 139-147. (in Chinese)
26 于雷,洪永胜,耿雷,等. 基于偏最小二乘回归的土壤有机质含量高光谱估算[J]. 农业工程学报, 2015, 31(14): 103-109.
YU Lei,HONG Yongsheng,GENG Lei,et al. Hyperspectral estimation of soil organic matter content based on partial least squares regression[J]. Transactions of the CSAE, 2015, 31(14): 103-109. (in Chinese)
27 张智韬,兰玉彬,郑永军,等. 影响大豆NDVI的气象因素多元回归分析[J]. 农业工程学报, 2015, 31(5): 188-193.
ZHANG Zhitao,LAN Yubin,ZHENG Yongjun,et al. Multiple regression analysis of soybean NDVI affected by meteorological factors[J]. Transactions of the CSAE, 2015, 31(5): 188-193. (in Chinese)
28 高惠璇. 处理多元线性回归中自变量共线性的几种方法——SAS /STAT软件(6.12)中REG等过程增强功能的使用[J]. 数理统计与管理, 2000, 20(5): 49-55.
GAO Huixuan. Some method on treating the collinearity of independent variables in multiple linear regression[J]. Journal of Applied Statistics and Management, 2000, 20(5): 49-55. (in Chinese)
29 张曼,刘旭华,何雄奎,等. 岭回归在近红外光谱定量分析及最优波长选择中的应用研究[J]. 光谱学与光谱分析, 2010, 30(5): 1214-1217.
ZHANG Man,LIU Xuhua,HE Xiongkui,et al. Study on the application of ridge regression to near-infrared spectroscopy quantitative analysis and optimum wavelength selection[J]. Spectroscopy and Spectral Analysis, 2010, 30(5): 1214-1217. (in Chinese)
30 杨楠. 岭回归分析在解决多重共线性问题中的独特作用[J]. 统计与决策,2004(3): 14-15.
31 孙越君,郑小坡,秦其明,等. 不同质量含水量的土壤反射率光谱模拟模型[J]. 光谱学与光谱分析, 2015, 35(8): 2236-2240.
SUN Yuejun,ZHENG Xiaopo,QIN Qiming,et al. Modeling soil spectral reflectance with different mass moisture content[J]. Spectroscopy and Spectral Analysis, 2015, 35(8): 2236-2240. (in Chinese)
32 陈祯. 不同土壤含水率、体积质量及光谱反射率的关系模型[J]. 农业工程学报, 2012, 28(4): 76-81.
CHEN Zhen. Relationship model among water content, bulk density and reflectivity of different soil[J]. Transactions of the CSAE, 2012, 28(4): 76-81. (in Chinese)
33 何挺,王静,程烨,等. 土壤水分光谱特征研究[J]. 土壤学报, 2006, 43(6): 1027-1032.
HE Ting,WANG Jing,CHENG Ye,et al. Spectral features of soil moisture[J]. Acta Pedologica Sinica, 2006, 43(6): 1027-1032. (in Chinese)
34 李严洁. 多元回归中的多重共线性及其存在的后果[J]. 中国卫生统计, 1992, 9(1): 24-27.
LI Yanjie. Multicollinearity and its consequence in muitiple regression[J]. Chinese Journal of Health Statistics, 1992, 9(1): 24-27. (in Chinese)
35 刘国旗. 多重共线性的产生原因及其诊断处理[J]. 合肥工业大学学报:自然科学版, 2001, 24(4): 607-610.
LIU Guoqi. Cause of multi-collinearity and its diagnosis and treatment[J]. Journal of Hefei University of Technology: Natural Science, 2001, 24(4): 607-610. (in Chinese)
36 张秋霞,张合兵,张会娟,等. 粮食主产区耕地土壤重金属高光谱综合反演模型[J/OL]. 农业机械学报, 2017, 48(3): 148-155. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?flag=1&file_no=20170319&journal_id=jcsam.DOI:10.6041/j.issn.1000-1298.2017.03.019.
ZHANG Qiuxia, ZHANG Hebing, ZHANG Huijuan,et al. Hybrid inversion model of heavy metals with hyperspectral reflectance in cultivated soils of main grain producing areas[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(3): 148-155. (in Chinese)
猜你喜欢
环境保护与循环经济(2022年7期)2023-01-03
冶金能源(2022年5期)2022-10-14
——缺陷度的算法研究
条码与信息系统(2022年3期)2022-07-05
汽车电器(2022年6期)2022-07-02
广西植物(2021年1期)2021-03-24
科学与财富(2021年3期)2021-03-08
河南农业(2020年9期)2020-12-19
河南建材(2020年6期)2020-10-28
河南农业·综合版(2020年9期)2020-09-27
温州大学学报(自然科学版)(2019年2期)2019-06-04