基于ROS的语音控制及特定目标跟随飞行器
2018-03-11 08:40代政申剑涛张堡瑞张鑫
神州·下旬刊 2018年2期
关键词:飞行器
代政 申剑涛 张堡瑞 张鑫
摘要:本文旨在开发出一种基于ROS的语音控制及特定目标跟随飞行器。该飞行器可以用语音控制它的运动状态,并且可以根据指定目标的形状和颜色进行智能跟随[1-2]。本系统可以应用在多个方面,比如:危险物品搜索、军事目标检测及监视和车辆监控等方面。
关键词:飞行器;语音控制;目标跟随;ROS
0引言
随着科技的不断进步,无人机逐渐被应用于很多方面。包括航空摄像、高空作业和矿井勘测等领域[3-4],但是目前最主要的还是被用于航空拍摄领域。随着人们需求的不断提高,对无人机功能的要求也越来越高。一些危险领域的工作也需要无人机来实现。
本文开发一种飞行器可以用语音控制它的运动状态,并且可以根据指定目标的形状和颜色进行智能跟随。帮助人们解决生活中的难题,提高生活质量。
1 系统结构
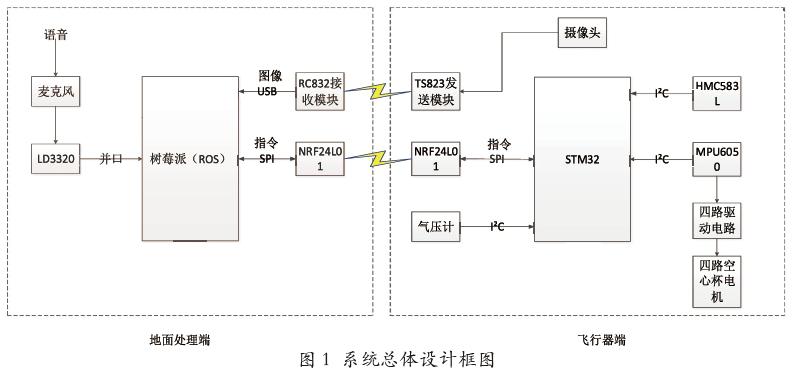
基于ROS的语音控制及特定目标跟随飞行器的系统框架图如图1所示。整个系统分为地面控制系统和飞行器端控制系统。地面控制系统采用树莓派为控制核心,内部用机器人操作系统ROS来运行。地面控制系统利用LD3320芯片外接麦克风来采集语音信息,将相应的控制信号通过NRF24L01无线传输模块实时的传送到飞行器端,将传感器信息进行融合处理后进行姿态解算,并根据语音控制信号要求,以达到改变飞行器姿态的目的。飞行器控制端上装有微型摄像头来负责图像的采集,并将采集的图像发给地面系统。同时对于地面发送来的语音指令进行处理执行和对特定目标的分析和匹配来进行跟随。
2 硬件部分
2.1主控器模块和传感器模块设计
飞行器端的主控制器选用意法半导体的STM32F103ZET6这款处理器,其内部采用ARM的32位Cortex-M3内核,具有很快的处理速度。四旋翼飞行器在控制的过程中需要实时的采集姿态信息,本设计采用了采用六轴运动组件MPU6050、三轴数字罗盘HMC5583L传感器来检测四旋翼飞行过程中的姿态信息。
2.2电机控制模块和无线传输模块设计
系统选用的是空心杯电机,由于其需要较大的电流才能驱动工作,所以电路中通过四路MOSFET来驱动,然后通过控制PWM的占空比来调节电机转速。系统采用的无线通信芯片型号为NRF24L01,是一种功能强大的射频收发器,通信距离50米左右,具备自动重发功能。配置后即可利用其进行通信。
3 软件部分
3.1 语音控制端设计
语音识别模块选用语音处理芯片LD3320。通过先进的优化算法,无需任何的训练,其就可以完成一定词汇量的任意人声的识别,准确率高达95%以上。语音系统可有上述单条指令为一条语句,也可由多条指令共同构成一条语句。当读取到“开始”指令后即语句开始,读取到“结束”指令为语句的结束。
3.2 特定目标跟随端设计
无人机通过摄像头采集到视频图像,stm32控制器将视频通过无线模块发送给树莓派,在树莓派上进行图像的预处理。通过中值滤波消除椒盐噪声和脉冲噪声,保护边缘等信息。通过高斯平滑滤波滤去图像中叠加的高频噪声,并保留原图像的特征信息。通过线性灰度变换法将曝光不足或曝光过度的区域按照线性函数进行拉伸,增强图像的对比度,改善图像的视觉效果。
飞行器端通过气压计传感器获得飞行高度,并保持飞行高度不变。地面控制端获取到跟踪目标的运动轨迹后,控制飞行器在水平方向做同步跟随。
3.3 ROS的移植与实现
搭建Ubuntu14.04LTS桌面系统;安装G++、 Python、 GTK2.0等图像处理依赖项;安装CUDA、 OpenCV14Tegra、 ROS、 OpenCV2.4.9。
4 结束语
本项目以四旋翼飞行器为研究对象,通过语音识别技术来控制飞行器的运动状态,利用图像处理的方法来采集视频图像,并将信息发送到地面系统并在树莓派显示屏上显示出来。通过视频上人物特征来识别特定目标,从而实现跟随的目的。本系统可以进行扩大化,开发成有利于工业利用的飞行器,帮助人们解决更多的难题。
参考文献:
[1]何瑜.四轴飞行器控制系统设计及其姿态解算和控制算法研究[D].成都:電子科技大学,2015.
[2]左轩尘,韩亮亮,庄杰,石琪琦,黄炜.基于ROS的空间机器人人机交互系统设计[J].计算机工程与设计,2015,12(36):3371-3375.
[3]刘洪伟.基于单目视觉的移动机器人目标识别与定位[D];山东大学,2011.
[4]金绍敏.四轴飞行器的设计与算法研究[D].湖北:中南民族大学.2015.
项目基金:文章源自西南科技大学创新基金项目资助 CX17-082
猜你喜欢
小天使·五年级语数英综合(2021年10期)2021-10-19
学苑创造·A版(2020年11期)2020-01-07
发明与创新·中学生(2019年2期)2019-02-26
发明与创新·中学生(2018年12期)2018-12-29
环球时报(2018-11-30)2018-11-30
智富时代(2018年5期)2018-07-18
智富时代(2018年5期)2018-07-18
作文周刊·小学三年级版(2017年32期)2017-09-04
小朋友·快乐手工(2015年5期)2015-06-06
第二课堂(初中版)(2009年4期)2009-07-02