
腹鳞功能仿生的蛇形机器人仿真研究
2018-03-09 20:31王云开席义立李言民
科技视界 2017年35期
关键词:仿真
王云开+席义立+李言民
【摘 要】受益于独特的冗余脊骨结构及鳞片皮肤,生物蛇具有极强的运动能力。目前受仿生皮肤材料的限制,大多采用双向被动轮实现鳞片的摩擦各向异性。双向被动轮使蛇形机器人能方便的前进后退,但存在驱动能力差、易打滑問题。因此,基于蛇腹鳞片的摩擦各向异性,提出一种基于棘轮结构的单排单向蛇形机器人,并在SolidWorks软件中设计了机械模型。然后在ADAMS软件中对该机器人的运动能力进行了仿真研究,实现了蛇形机器人的直线运动和转向运动。仿真结果表明:单排单向蛇形机器人可以在斜坡上进行运动,具有较好的运动稳定性。
【关键词】蛇形机器人;腹鳞;仿真;单向轮
中图分类号: TP242 文献标识码: A 文章编号: 2095-2457(2017)35-0075-003
Simulation of Bionic Serpentine Robot with Abdominal Function
WANG Yun-kai1 XI Yi-li2 LI Yan-min3*
(1. Dalian Eighth Middle School, Dalian 116021, Liaoning, China;2. North Valley Electronics Co., Ltd., Jinan 251100, Shandong, China;3. China Qingdao Sifang Locomotive and Rolling Stock Co., Ltd., Qingdao 266000, Shandong, China)
【Abstract】Benefit from the unique structure of redundant spine and scaly skin, biological snake has a strong ability to exercise. Currently bionic skin material restrictions, mostly using two-way passive wheel to achieve friction anisotropy scales. Two-way passive wheel snake-shaped robot can easily move forward and backward, but there is poor driving ability, easy to slip problem. Therefore, based on the frictional anisotropy of serpentine scales, a single-row, one-way, serpentine robot based on ratchet structure was proposed and a mechanical model was designed in SolidWorks software. Then the simulation of the robot's motion capability in ADAMS software has been carried out to realize the linear motion and steering motion of the serpentine robot. The simulation results show that the single-row one-way serpentine robot can move on the slope with good stability.
【Key words】Serpentine robot; Ventral scales; Simulation; Unidirectional wheel
0 引言
生物蛇可以自由穿梭在山地、丛林、沙漠,甚至是水下,是一种具有极强环境自适应能力的无脊椎生物。自然界中的蛇身体狭长且外形诡异,往往给人一种恐惧的感觉,但同时,这种灵活的运动天赋也引起了科学家们的关注。因此,研究学者们从上世纪开始对生物蛇进行仿生,开发了多种多样的蛇形机器人,并期望用于灾难救援,军事侦察,太空探测等复杂应用环境[1]。
生物蛇的运动能力一定程度上得益于其独特的灵活的骨骼及肌肉结构。蛇是脊椎动物,其骨骼分为三种:头骨、脊骨和肋骨。它的身体狭长而且柔软,由彼此相连的 200~400 块脊骨组成。由于蛇的脊骨数量庞大,通过相邻脊骨间的微小变化的叠加就可以实现蛇身体构形上的很大调整。蛇的运动形式大致分为四类:蜿蜒运动(Serpentine locomotion),伸缩运动(Concertina locomotion),直线运动(Rectilinear locomotion)和侧向运动(Sidewinding locomotion),其中蜿蜒运动是最常见且应用最广泛的运动形式。
国内外的学者从结构上进行仿生研究,设计了不同运动原理的蛇形机器人。上世纪七十年代,日本的Hirose教授提出了最早的蛇形机器人样机,具有20个依靠伺服机构驱动的摆动关节,且该机器人的腹部安装了脚轮以实现与地面的有效接触[2]。继第一台蛇形机器人,Hirose 教授团队又开发了双排被动轮、主动轮、履带等形式的二维或三维运动蛇形机器人[3]。立命馆大学的马书根团队也开发了多种双向被动轮式蛇形机器人[4]。美国卡耐基梅隆大学开发了无轮式的蛇形机器人,在侧向运动及攀爬运动方面具有更大的优势[5]。在国内,中科院沈阳自动化研究所较早地开展了研究,并开发出了单排双向被动轮的二维蛇形机器人,及双排被动轮的三维蛇形机器人[6-7]。
从目前研究来看,蛇形机器人主要采用双向被动轮、主动轮或履带与地面接触,从而产生摩擦力推动蛇形机器人运动。主动轮或是履带式的蛇形机器人的运动原理与普通地面移动机器人类似,依靠静摩擦力。双向被动轮式的蛇形机器人是依靠身体的扭曲摆动,从而与地面之间产生侧向摩擦力,这种摩擦力的各向异性促使机器人可以产生运动。从仿生观点看,生物蛇具有独特的蛇鳞结构,腹鳞和侧鳞能够提供蛇摩擦力,从而产生前向运动。endprint
本文从蛇腹鳞结构特征仿生出发,设计了一种基于棘轮结构的蛇形机器人,并在ADAMS动力学软件中进行了运动仿真分析。
1 生物蛇鳞片结构分析
生物蛇的鳞片构成了坚硬的皮肤,由最外层的表皮和真皮生成,在蛇身体保護和运动中起到了关键作用。蛇鳞间的着褶缝增加了蛇匍匐爬行的韧性和皮肤强度。因此,分析蛇鳞片有助于蛇形机器人的仿生设计。
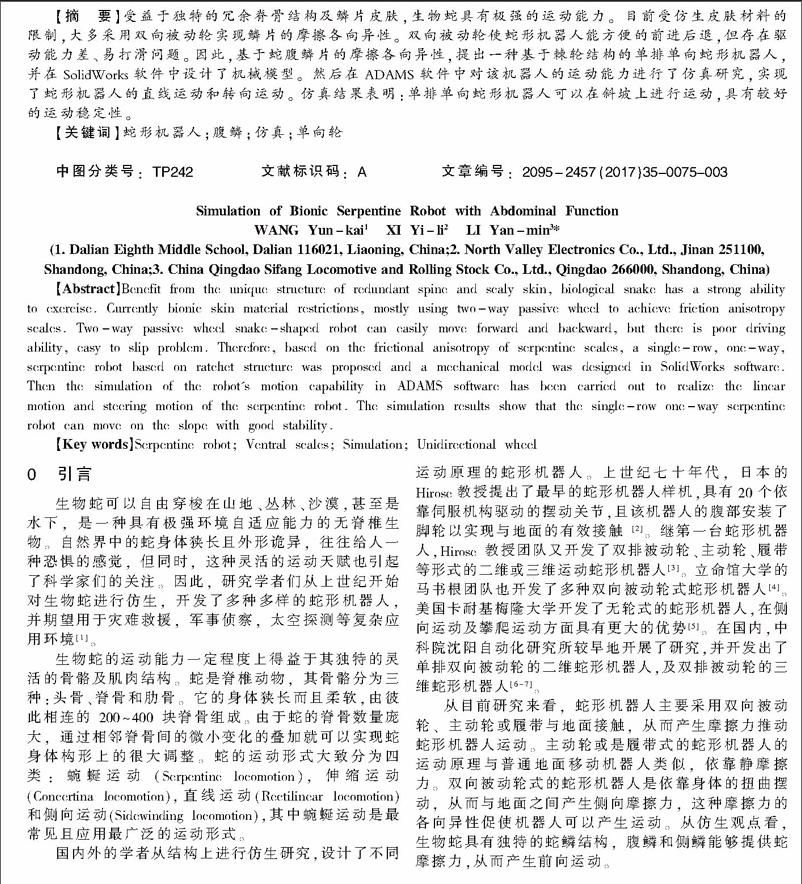
蛇鳞片分布位置不同、形状各异,但从仿生观点看,蛇的腹鳞和侧鳞都对蛇的灵活运动起到了关键作用。如图1所示,分布在蛇腹部(身体正下方)位置的是腹鳞,呈现波纹状。蛇侧鳞与腹鳞纹理方向一般一致,属于腹鳞的延伸。因生活方式的不同,腹鳞的形状、数量及分布特征并不相同。但其具有共同的摩擦特性,腹鳞和侧鳞使生物蛇向后运动的摩擦系数比向前运动的要高60%以上,即向前容易运动,向后较难运动。这种摩擦的各向异性与鳞片的结构特点和神经信号对腹鳞姿态的调节具有很大关系。生物蛇的腹鳞所表现的高驱动摩擦性能和低摩擦阻力为蛇型机器人仿生“皮肤”的设计提供了良好的仿生依据。
2 蛇形机器人设计与控制模式
2.1 机械结构设计
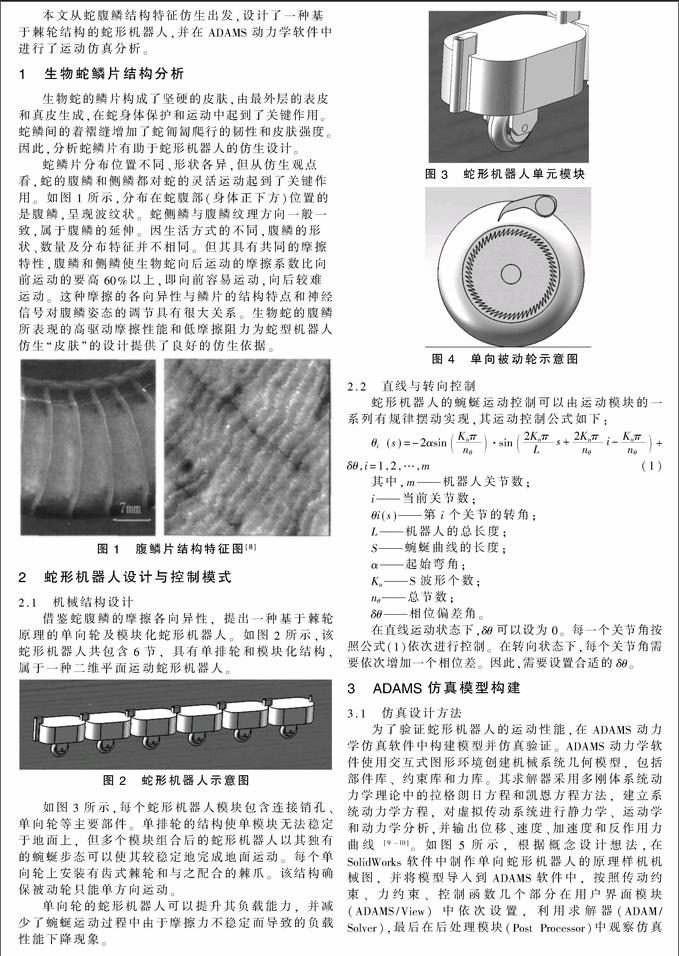
借鉴蛇腹鳞的摩擦各向异性,提出一种基于棘轮原理的单向轮及模块化蛇形机器人。如图2所示,该蛇形机器人共包含6节,具有单排轮和模块化结构,属于一种二维平面运动蛇形机器人。
如图3所示,每个蛇形机器人模块包含连接销孔、单向轮等主要部件。单排轮的结构使单模块无法稳定于地面上,但多个模块组合后的蛇形机器人以其独有的蜿蜒步态可以使其较稳定地完成地面运动。每个单向轮上安装有齿式棘轮和与之配合的棘爪。该结构确保被动轮只能单方向运动。
单向轮的蛇形机器人可以提升其负载能力,并减少了蜿蜒运动过程中由于摩擦力不稳定而导致的负载性能下降现象。
2.2 直线与转向控制
蛇形机器人的蜿蜒运动控制可以由运动模块的一系列有规律摆动实现,其运动控制公式如下:
θi(s)=-2αsin■·sin■s+■i-■+δθ,i=1,2,…,m(1)
其中,m——机器人关节数;
i——当前关节数;
θi(s)——第i个关节的转角;
L——机器人的总长度;
S——蜿蜒曲线的长度;
α——起始弯角;
Kn——S波形个数;
nθ——总节数;
δθ——相位偏差角。
在直线运动状态下,δθ可以设为0。每一个关节角按照公式(1)依次进行控制。在转向状态下,每个关节角需要依次增加一个相位差。因此,需要设置合适的δθ。
3 ADAMS仿真模型构建
3.1 仿真设计方法
为了验证蛇形机器人的运动性能,在ADAMS动力学仿真软件中构建模型并仿真验证。ADAMS动力学软件使用交互式图形环境创建机械系统几何模型,包括部件库、约束库和力库。其求解器采用多刚体系统动力学理论中的拉格朗日方程和凯恩方程方法,建立系统动力学方程,对虚拟传动系统进行静力学、运动学和动力学分析,并输出位移、速度、加速度和反作用力曲线[9-10]。如图5所示,根据概念设计想法,在SolidWorks软件中制作单向蛇形机器人的原理样机机械图,并将模型导入到ADAMS软件中,按照传动约束、力约束、控制函数几个部分在用户界面模块(ADAMS/View)中依次设置,利用求解器(ADAM/Solver),最后在后处理模块(Post Processor)中观察仿真结果及动画。
3.2 用户界面设计
将SolidWorks中设计完成的单向蛇形机器人模型导入到ADAMS软件后,初始化设置单位、重力等仿真环境参数,并且可以通过重力方向的设置间接改变机器人的爬坡状态。如图6所示,机器人相当于在30度坡面上运动。然后,利用Material Type定义机器人各主要部件为铝合金材料属性,定义滚轮为橡胶材料属性。
从机器人头部至尾部,依次对各模块添加约束。例如,将模块1和模块2之间的销轴之间添加转动副,在滚轮和滚轮支架轴之间添加转动副,在滚轮与齿轮之间添加固定副。在添加完传动约束后,要对力约束进行添加。例如,在齿式棘轮和棘爪之间,以及滚轮和地面之间添加接触力约束,并设置摩擦系数,如表1所示。
如图7所示,在添加完各种约束后,需要对机器人系统模型进行运动控制输入。分别对模块间的五个旋转副添加Motion实现转角运动控制。最后设定仿真时间20s,仿真步长0.05。
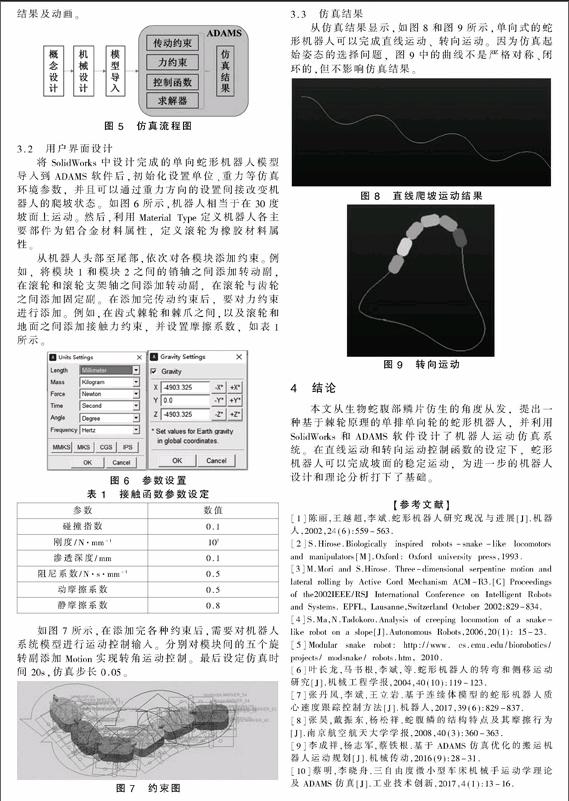
3.3 仿真结果
从仿真结果显示,如图8和图9所示,单向式的蛇形机器人可以完成直线运动、转向运动。因为仿真起始姿态的选择问题,图9中的曲线不是严格对称、闭环的,但不影响仿真结果。
4 结论
本文从生物蛇腹部鳞片仿生的角度从发,提出一种基于棘轮原理的单排单向轮的蛇形机器人,并利用SolidWorks和ADAMS软件设计了机器人运动仿真系统。在直线运动和转向运动控制函数的设定下,蛇形机器人可以完成坡面的稳定运动,为进一步的机器人设计和理论分析打下了基础。
【参考文献】
[1]陈丽,王越超,李斌.蛇形机器人研究现况与进展[J].机器人,2002,24(6):559-563.
[2]S.Hirose.Biologically inspired robots-snake-like locomotors and manipulators[M].Oxford: Oxford university press,1993.
[3]M.Mori and S.Hirose. Three-dimensional serpentine motion and lateral rolling by Active Cord Mechanism ACM-R3.[C] Proceedings of the2002IEEE/RSJ International Conference on Intelligent Robots and Systems. EPFL, Lausanne,Switzerland October 2002:829-834.
[4]S.Ma,N.Tadokoro.Analysis of creeping locomotion of a snake-like robot on a slope[J].Autonomous Robots,2006,20(1): 15-23.
[5]Modular snake robot: http://www. cs.cmu.edu/biorobotics/ projects/ modsnake/ robots.htm, 2010.
[6]叶长龙,马书根,李斌,等.蛇形机器人的转弯和侧移运动研究[J].机械工程学报,2004,40(10):119-123.
[7]张丹凤,李斌,王立岩.基于连续体模型的蛇形机器人质心速度跟踪控制方法[J].机器人,2017,39(6):829-837.
[8]张昊,戴振东,杨松祥.蛇腹鳞的结构特点及其摩擦行为[J].南京航空航天大学学报,2008,40(3):360-363.
[9]李成祥,杨志军,蔡铁根.基于ADAMS仿真优化的搬运机器人运动规划[J].机械传动,2016(9):28-31.
[10]蔡明,李晓舟.三自由度微小型车床机械手运动学理论及ADAMS仿真[J].工业技术创新,2017,4(1):13-16.endprint
猜你喜欢
中国教育技术装备(2016年20期)2016-12-12
科技资讯(2016年18期)2016-11-15
科技资讯(2016年18期)2016-11-15
