
利用车载动态PPP技术检核SRTM、ASTER GDEM和AW3D模型的高程精度
2018-03-07 06:45:01魏德宏张永毅张兴福
测绘通报 2018年2期
魏德宏,张永毅,张兴福
(1. 广东工业大学测绘工程系,广东 广州 510006; 2. 广州市城市规划勘测设计研究院,广东 广州 510060)
数字高程模型(DEM)提供了丰富的地面高程信息,已在测绘、水文、气象、地球物理、工程建设等领域得到广泛的应用。SRTM是由美国国家航空航天局(NASA)和美国国家地理空间情报局(NGA)合作完成并于2003年释放的全球高分辨率DEM,SRTM3的分辨率约3″(90 m),标称高程精度为16 m[1]。ASTER GDEM是由NASA和日本经济产业省(METI)共同研制并于2009年释放的全球高分辨率DEM,该模型的空间分辨率为1″,ASTER GDEM V2模型的高程精度约为17 m[2]。AW3D(ALOS World 3D)是由日本宇宙航空研究开发机构(JAXA)和日本遥感技术中心(RESTEC)联合研制并于2014年开始逐步释放的全新一代高分辨率DEM,采用了搭载在ALOS卫星上的全色立体测图仪(panchromatic remote sensing instrument for stereo mapping,PRISM),从2006—2011年采集了约650万景全球影像数据,确定了分辨率为1″的AW3D30模型[4]。分析上述各模型在我国局部区域的高程精度具有重要的现实意义,可为模型的使用提供重要的参考,一般可采地面控制点数据、机载激光扫描数据、现有的各类比例尺地形图等数据对DEM模型精度进行外部检核[5]。
结合AW3D30等数字高程模型的高程精度情况,本文探讨利用车载动态GNSS精密单点定位技术实现对AW3D30等数字高程模型高程精度的快速检核,并且利用广州至肇庆公路剖面的实测数据进行计算。
1 原理与方法
1.1 动态点坐标和正常高确定方法
精密单点定位技术(PPP)是指利用载波相位观测值,以及由IGS等组织提供的高精度卫星星历及卫星钟差来进行精密单点定位的方法[6],可分为静态和动态定位模式。目前,国外有AUSPOS、SCOUNT、OPUS、APPS、CSRS-PPP等在线的GNSS精密单点定位服务系统,可方便进行实时PPP动/静解算[7]。
PPP解算一般是获得某一ITRF参考框架和历元下的三维坐标,可直接将其转换为对应的WGS-84坐标,若已知某点的大地高为H,高程异常为ζ,则该点的正常高h为
h=H-ζ
(1)
根据Bruns公式,地球表面上任意点P的模型高程异常ζ可由下式获得[8]

(2)
1.2 插值方法
获得动态点的WGS-84坐标和正常高后,为了用该数据检核DEM模型的高程精度,需要采用一定的内插方法获得动态点的数字高程模型正常高。常用的内插方法有双线性插值法、最邻近插值法、三次多项式插值法和三次样条插值法等。
1.2.1 双线性插值法(Linear)
公式如下
Z(x,y)=b1+b2x+b3y+b4xy
(3)
式中,Z(x,y)为(x,y)处插值点的估计值;系数b1、b2、b3和b4可由待插点周围的已知数据点计算。
1.2.2 最邻近插值法(Nearest)
最邻近插值法又称泰森多边形方法。每个泰森多边形内仅含有一个已知点数据,将该已知点的值作为泰森多边形内所有待定点的值,即直接采用距离待定点(插值点)最近的已知点值作为待定点的值。最近邻点插值法会使插值区域出现多个平面,当估值点距离已知点较远时,其内插结果失真会比较严重。
1.2.3 三次多项式插值法(Cubic)
公式如下
Z(x,y)=a0+a1x+a2y+a3xy+a4x2+a5y2+a6x2y+
a7xy2+a8x3+a9y3
(4)
式中,系数a0,a1,a2,a3,a4,a5,a6,a7,a8,a9可由待插点周围的已知数据点计算。
1.2.4 三次样条插值法(Spline)
常用的三次多项式B样条曲面插值,其数学公式可以表达为在空间给定(n+1)×(m+1)个点Zij(i=0,1,…,n;j=0,1,…,m),则可以逼近生成一个n×m次的B样条曲面片,插值公式定义为
(5)
式中,Zij为B样条曲面的数据点;Fin(x)、Fim(y)为B样条基函数。
2 试验方案
将一套Trimble 5800接收机安置于车顶,并量取仪器到地面的高度,车速约为80~110 km/h,采样率为1 s,沿着广州至肇庆的公路进行数据采集,总共采集到约2 h 15 min的观测数据,采集数据的展点图如图1所示。

图1 车载GNSS数据采集路线
具体数据处理过程为:①利用加拿大国土资源部在线GNSS精密单点定位数据处理系统(CSRS-PPP)对采集的GNSS数据进行动态解算并经转换得到动态点的WGS-84坐标;②利用2160阶EGM2008重力场模型和仪器高将动态点的大地高转换为正常高;③采用4种内插方法(Linear、Nearest、Cubic、Spline)获得动态点的数字高程模型正常高;④对步骤②—③的正常高数据进行比较分析以评价DEM的高程精度。数据处理流程如图2所示。
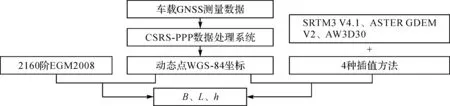
图2 数据处理流程
3 试验分析
收集了试验区域的SRTM3 V4.1、ASTER GDEM V2和AW3D30 DEM模型数据,范围为23°N—24°N,112°E—114°E具体见表1。

表1 SRTM3 V4.1、ASTER GDEM2和AW3D30的基本信息
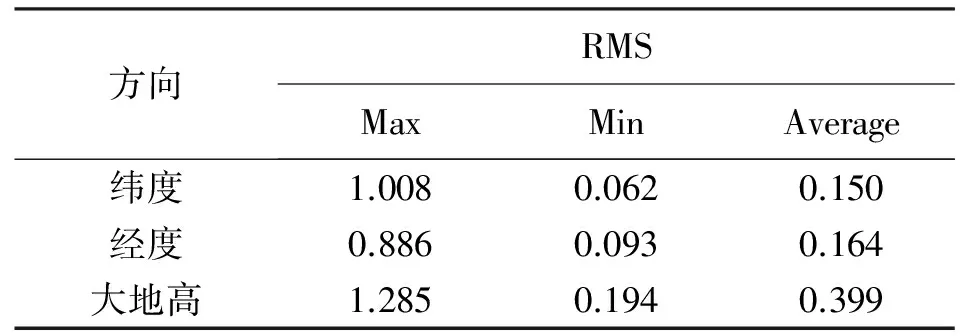
本文采用CSRS-PPP系统进行PPP动态解算,获得了平均观测历元时刻ITRF08框架下的三维直角坐标及对应WGS-84椭球的大地坐标,精度统计结果见图3和表2。
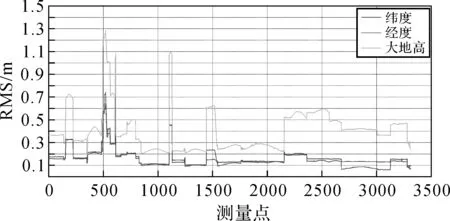
图3 纬度、经度、大地高方向的内符合精度统计结果
m
由图3和表2可得,动态解算得到的所有测量点在纬度和经度方向的平均RMS分别为0.150 m和0.164 m,在大地高方向的平均RMS为0.399 m。
本文利用EGM2008全球重力场模型直接将动态点的大地高转换为正常高。许耿然等的研究表明,在整个广东地区,2160阶的EGM2008计算的高程异常精度为0.076 m[9]。综合模型高程异常的精度和上述大地高的精度,本文所采集到的动态点正常高的平均精度优于0.406 m,远优于本文所选的DEM数字高程模型的标称高程精度,因此,采集的动态点数据满足对DEM进行高程精度检核的要求。
利用上文中4种插值方法分别对SRTM3 V4.1、ASTER GDEM V2和AW3D30三种DEM模型进行插值,以获得GNSS动态点的数字高程模型正常高,并与动态点正常高进行比较,以评价各DEM模型的高程精度。其检核结果和精度统计情况分别见图4和表3。
图4和表3的结果表明:①在检核区域内,SRTM3 V4.1的高程精度最高,AW3D30次之,ASTER GDEM V2的高程精度最差;②对于4种插值方法,SRTM3 V4.1高程检核结果的标准差均小于3.350 m,AW3D30高程检核结果的标准差均小于3.340 m,ASTER GDEM V2的高程检核结果标准差最大达4.098 m;③在检核区域,三次样条插值结果、双线性插值结果和三次多项式插值结果具有较高的一致性,最邻近插值结果较其余三种插值方法差;④在检核区域内,3个DEM模型的高程精度均优于其标称精度。
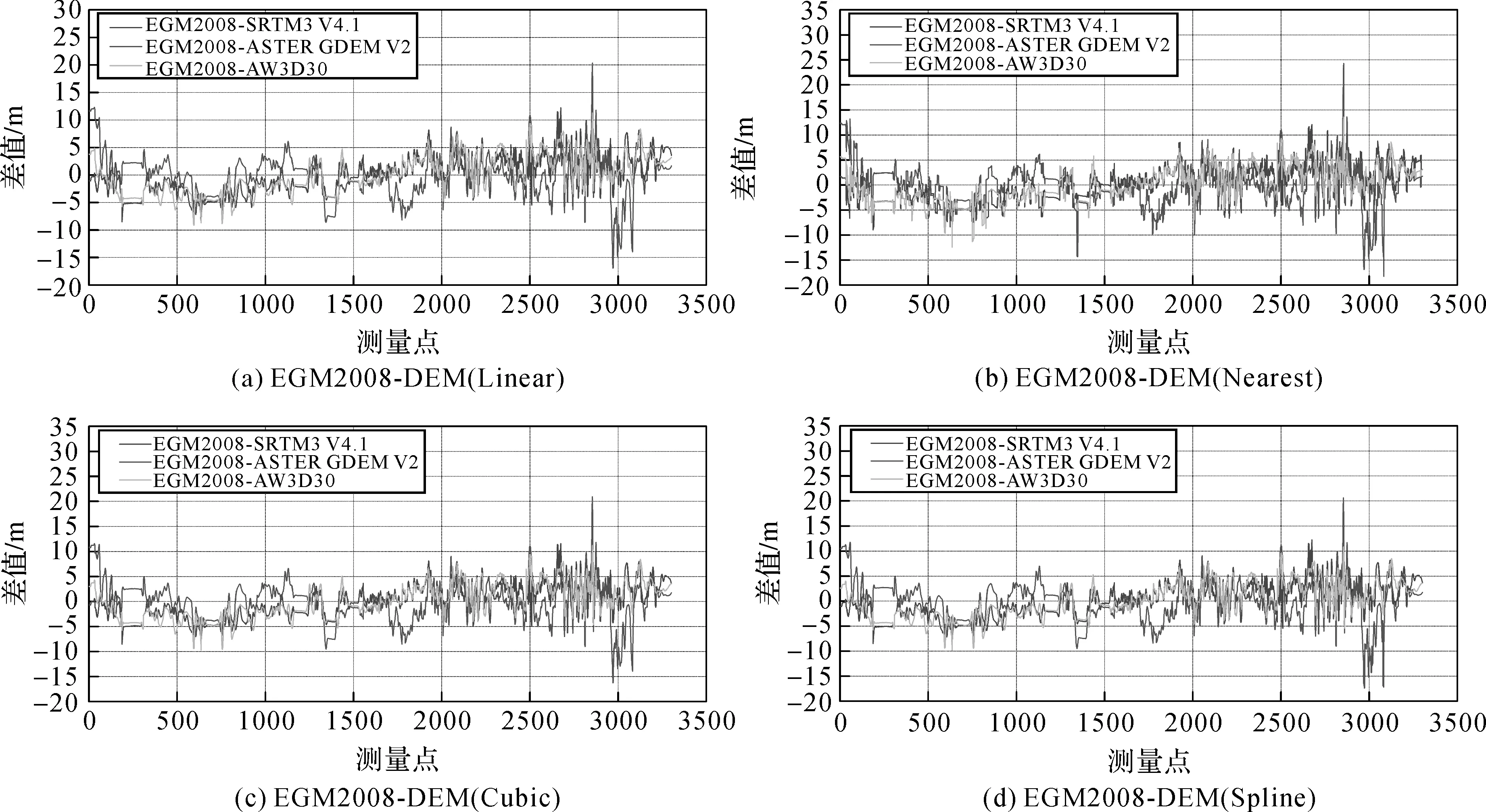
图4 检核结果

m
4 结 语
本文利用车载GNSS单点定位技术测定大地高,经EGM2008重力场模型转换为正常高后,对3种全球高分辨率DEM进行了高程精度检验。多种插值方法计算结果表明,在广州至肇庆公路剖面,SRTM3 V4.1、ASTER GDEM V2、AW3D30的高程标准差分别小于3.350 m、4.098 m和3.340 m,均优于其全球标称高程精度。本文采用的车载GNSS测量的方法简便高效,在大区域的DEM检验中,有较高的实用价值。
[1] RODRIGUEZ E,MORRIS C S,BELZ J E.A Global Assessment of the SRTM Performance[J].Photogrammetric Engineering & Remote Sensing,2006,72(3):249-260.
[2] TACHIKAWA T,HATO M,KAKU M,et al.Characteristics of ASTER GDEM Version 2[J]. Geoscience & Remote Sensing Symposium,2011,24(8):3657-3660.
[3] MEYER D J,TACHIKAWA T,ABRAMS M,et al.The ASTER Global Digital Elevation Model Version 2.0-Eearly Validation Results[J].Agu Fall Meeting,2011,20(4):1442.
[4] TAKAKU J,TADONO T,TSUTSUI K,et al.Validation of ‘AW3D’Global DSM Generated from ALOS PRISM[J].Isprs Annals of Photogrammetry Remote Sensing & Spatial Information,2016(Ⅲ-4):25-31.
[5] HIRT C,FILMER M S,FEATHERSTONE W E.Comparison and Validation of the Recent Freely Available ASTER-GDEM ver1,SRTM ver4.1 and GEODATA DEM-9S ver3 Digital Elevation Models over Australia[J].Journal of the Geological Society of Australia,2010,57(3):337-347.
[6] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2009.
[7] 王挥云.4 种在线PPP 服务系统定位精度分析[J].测绘通报,2016(7):66-69.
[8] HEISKANEN W S,MORITZ H.Physical Geodesy [M].San Francisco:Freeman,1967.
[9] 许耿然,周建营,朱紫阳.广东地区最优地球重力场模型的选择及精度分析[J].大地测量与地球动力学,2013,33(5):25-28.
猜你喜欢
幼儿教育·教育教学版(2023年2期)2023-06-23 11:18:58
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
装饰装修天地(2020年7期)2020-06-01 18:43:59
山东冶金(2019年5期)2019-11-16 09:09:10
智富时代(2019年7期)2019-08-16 06:56:54
山东工业技术(2016年15期)2016-12-01 05:31:14
工业设计(2016年7期)2016-05-04 04:01:15
信息记录材料(2016年4期)2016-03-11 15:22:33
新校长(2016年8期)2016-01-10 06:43:49
石家庄铁路职业技术学院学报(2015年3期)2015-11-30 08:41:09
