
无刷永磁直流电动机在地铁站台门中的应用
2018-03-05 03:44赵斌
机电信息 2018年6期
赵 斌
(佛山市铁路投资建设集团有限公司,广东佛山528000)
0 引言
随着电子技术、功率元件技术和高性能永磁材料技术的发展,无刷永磁直流电动机利用电子换向器取代了机械换向器,使这种电动机不但保留了直流电动机运行效率高、无励磁损耗以及调速性能好等优点,而且具有交流电动机结构简单、运行可靠、维护方便等优点。无刷永磁直流电动机的这些优点正好符合了地铁站台门(Platform Screen Door,PSD)运动指标的各项要求。
1 PSD的运动要求
PSD安装在地铁、轻轨、列车客运站的站台两侧,将站台与列车轨道区域隔离。在列车到站后,PSD与列车门同步打开和关闭,供乘客上下车。PSD可保证乘客的安全,同时也可为车站节省40%的空调冷(热)量[1]。
PSD的开门速度要遵循“慢—快—慢”的速度曲线,关门速度要遵循“快—慢—更慢”的速度曲线,各个速度转换区域的曲线要求平滑,无冲击,如图1、图2所示。

图1 PSD开门速度曲线
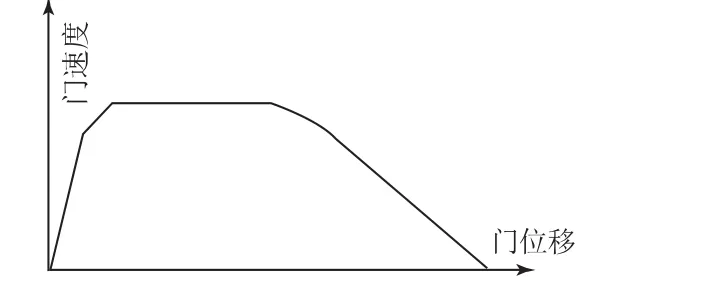
图2 PSD关门速度曲线
2 PSD对无刷永磁直流电动机的控制原理
2.1 通过单片机PWM控制实现速度的控制
此系统采用三相△连接,功率元件采用两两通电方式。采用单片机实现全数字式控制,通过脉宽调制PWM来控制电动机电枢电压以实现调速。当改变输出脉冲宽度,就相当于改变供给电动机绕组的平均电压,从而控制了电动机的转速。这里通过单片机控制P4.0口输出PWM波的占空比达到控制电机转速的目的,而通过P1.1口输出高低电平控制电动机的启停[2]。
此系统中的功率元件V1~V6既要负责PWM控制,又要负责换相的控制。控制原理如下:将单片机的P4.0口作为PWM输出口,和P5口同接在或非门的输入端,当P4.0输出为高电平时,则主电路中的V2、V4、V6都被封死;而当P4.0输出为低电平时,则主电路中的6只MOSFET仍然受P5口的控制去进行电动机的正常换向。因此,只需对P4.0输出的PWM波占空比进行控制,就可控制电动机的转速。
2.2 换相控制
换相是通过转子位置传感器来实现的,此系统使用的是磁敏式(霍尔元件)转子位置传感器。为获得三相互差120°、宽度为180°的方波信号,使用3只霍尔元件,它们在空间的布置满足相隔空间机械角度α=2π/3p(p为极对数)的条件。
此系统六极电动机的3个霍尔元件位置传感器H1、H2、H3在空间相差机械角度为120°。当永磁体转子依次经过霍尔元件H1、H2、H3时,H1~H3根据永磁体极性的不同将分别产生三相互差120°、宽度为180°的方波信号,如图3(a)所示。H1、H2、H3三路位置信号送入单片机的上升沿中断口CC0、CC2、CC3和下降沿中断口INT0、INT1、INT2,经软件处理后,就可得到逆变器功率开关的使能信号,如图3(b)所示[3]。
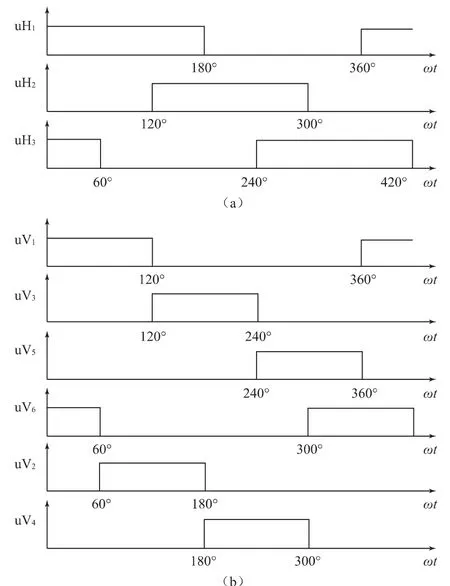
图3 正转时系统有关波形
2.3 正反转的控制
通过改变定子绕组的换相次序即可改变转动方向,换相表如表1所示。

表1 换相表
3 检测反馈
3.1 检测霍尔传感器脉冲实现位移的反馈
此系统需要PSD位移和速度一一对应的关系,那么首先要对位移和速度进行精确的测量。这里直接利用控制换相的霍尔传感器发出的脉冲来反映电动机的位移和转速[4]。
若只需检测一个霍尔元件H1的脉冲个数n,那么PSD的位移量s如式(1)所示:

式中,p为电动机的极对数;d为PSD的传动元件螺母螺杆副旋转一圈PSD所走过的路程。
在此系统的实际应用中,是把PSD从全开到关闭的总位移D存放在单片机的ROM中,在PSD第一次运行时,PSD以匀速从全开到关闭走完总位移的行程,单片机记录下走完全程霍尔元件H1的脉冲个数N,那么螺母螺杆副旋转一圈PSD所走过的路程d=D/(N/p)。计算出d后,单片机将d的数值存放在ROM中,以后就可以用式(1)实时计算出PSD的位移量了。
3.2 检测霍尔传感器脉冲实现速度的反馈
如图3(a)所示,单片机自动捕捉到霍尔传感器信号的两个上升沿,通过计算两个上升沿的时间间隔T及在T内计得的时钟脉冲φ的个数m,则通过公式f=1/T=1/(mφ),即可得到电动机的转速。
得到电动机的位移和速度后,根据存储在单片机的ROM中图1和图2的数据表,通过查表的方式来找出PSD在s1位移点时的整定速度v1,然后比较整定速度v1和在s1位移点时实测到的速度值v,如果v1>v,则提高单片机P4.0口输出PWM波的占空比,或者提高专用控制器MC33035输出的电压信号ur。这样,PWM波的占空比增大,逆变器输出的电压平均值升高,电动机速度上升,直到达到整定值v1。反之,如果v1<v,则降低单片机P4.0口输出PWM波的占空比,或者降低专用控制器MC33035输出的电压信号ur,原理同上,直到达到整定值v1。
3.3 检测电流实现转矩反馈
由电机学可知,电动机电磁转矩的表达式为式(2):

在通电期间,电动机的带电导体处于相同的磁场下,各相绕组的感应电动势如式(3)所示:

式中,n为电动机转速;φm为主磁通;p为极对数;N为总导体数。
从逆变器的直流端看,三相△连接的定子绕组感应电动势Ed由两相绕组并联后再与另外一相绕组串联后组成,所以有式(4):

因此,电磁转矩表达式可化为式(5):

式中,Id为PWM波电流的幅值;Ω=2πn/60。
由式(5)可以看出,无刷永磁直流电动机的电磁转矩表达式和普通直流电动机相同,其电磁转矩大小与磁通和电流幅值成正比,而磁通是恒定的,所以控制逆变器输出PWM波电流的幅值即可控制转矩[5]。
在此系统中,将两相绕组电流采样信号进行放大和校正后,送入A/D转换器后送入单片机的转矩反馈输入口。单片机将输入的电流(转矩)信号与整定的转矩数据相比较,判断增大或减小单片机输出PWM波的占空比。PWM波的占空比变大,逆变器输出的电压幅值就升高,流过定子绕组的电流就增大;反之则小。电流幅值闭环调节后,逆变器输出的电流幅值就能跟随给定的值变化,从而实现电动机转矩的闭环控制。
4 结语
综上所述,无刷永磁直流电动机在PSD中的应用主要包括了电动机的驱动控制电路、换相控制、正反转控制、PWM控制和位移/速度/转矩的三闭环控制等功能。实践表明,该系统在运行中获得了良好的动、静态性能,采用适当频率的PWM信号时,PSD可得到如图1和图2所示的运行曲线。由此可知,无刷永磁直流电动机伺服系统结构简单,控制方便、准确,具有广阔的应用前景和推广意义。
[1]张琛.直流无刷电动机原理及应用[M].2版.北京:机械工业出版社,2004.
[2]宋书中,常晓玲.交流调速系统[M].2版.北京:机械工业出版社,2012.
[3]吴守箴,臧英杰.电气传动的脉宽调制控制技术[M].北京:机械工业出版社.1995.
[4]孙晓霞.永磁无刷直流电动机的设计和仿真研究[D].杭州:浙江大学,2006.
[5]方力.基于单片机的直流电动机控制系统设计[J].机械制造与自动化,2011,40(6):175-177.
猜你喜欢
房地产导刊(2021年12期)2021-12-31
军民两用技术与产品(2021年7期)2021-10-13
上海大中型电机(2021年2期)2021-07-21
上海建材(2019年3期)2019-09-18
电子制作(2017年1期)2017-05-17
山东工业技术(2016年15期)2016-12-01
照明工程学报(2016年3期)2016-06-01
云南电力技术(2015年2期)2015-08-23
太空探索(2015年6期)2015-07-12
组合机床与自动化加工技术(2014年12期)2014-03-01
