
地空两用信息采集机器人设计
2018-03-01 07:11王伟李超艺刘九庆房银杰
橡塑技术与装备 2018年4期
王伟,李超艺,刘九庆,房银杰
(东北林业大学机电工程学院, 黑龙江 哈尔滨 150040)
随着物联网技术在农业信息化、智能化进程中的不断深入,精细农业是现代农业发展的必然趋势。
本文提出了一种用于农业信息采集的地空两用机器人。该机器人可以搭载用于农田信息采集的多种传感器,可以从地面和空中两个不同角度获取智能温室环境信息和作物生长状况信息。该机移动灵活,可靠性高,能耗低,采集数据快速,且便于收集与汇总数据,能够满足智能温室农田信息采集的需求。
1 农业信息采集地空两用机器人总体结构及参数选择
1.1 农业信息采集地空两用机器人总体结构
农业信息采集地空两用机器人总体结构如图1所示。主要由:地面行走机构,飞行机构,控制系统及信息采集系统四部分组成。

图 1 机器人三维模型
1.2 农业信息采集地空两用机器人主要性能指标
为了满足工作性能要求,机器人的主要性能指标,如表1所示。
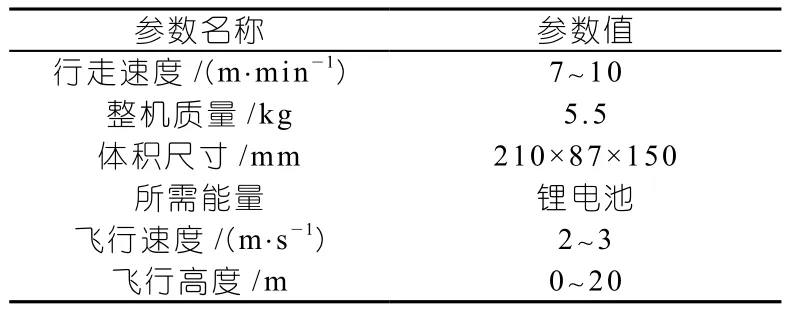
表1 机器人主要性能参数
2 地空两用农业信息采集机器人设计
2.1 地面行走机构设计
本机的地面行走机构,如图2所示。地面行走机构的结构件材料选择铝镁合金,很大程度上减轻了机构的重量,为后续实现整机的空中飞行提供了保障。机器人在农田工作时,通常要克服很大的地面阻力,因此本机采用四个圆周舵机提供动力的四轮驱动方式,以此来达到输出大扭矩的目的。为适应复杂的地形地貌,因此设计时采用了可以摆动灵活的四杆机构,以减少在跨越沟壑时产生的震动对机构的损害以及对信息采集结果的影响。

图2 行走机构示意图
2.2 飞行机构设计
本机的飞行机构是基于四旋翼飞行器原理设计的。飞行机构简图,如图3所示,电机1和电机3逆时针旋转的同时,电机2 和电机4 顺时针旋转,因此当机器人平衡飞行时,陀螺效应和空气动力扭矩效应均被抵消。由于各个旋翼对机身所施加的反扭矩与旋翼的旋转方向相反,因此当电机1 和电机3 逆时针旋转的同时,电机2 和电机4 顺时针旋转,可以相互抵消旋翼对机身的反扭矩,从而可以使整机保持平衡。
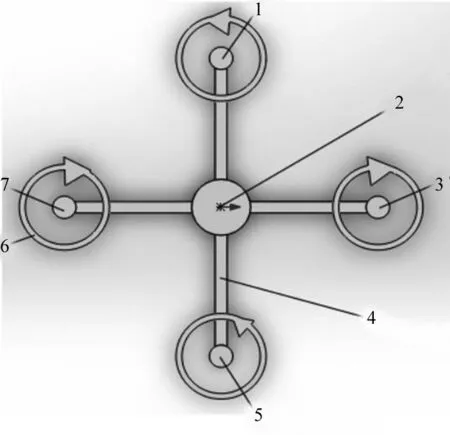
图3 飞行结构简图
2.3 控制系统设计
2.3.1 控制系统硬件设计
机器人控制系统结构如图4所示,该系统采用以STM32F407为核心的计算机主控板。主控板共有8个PWM输出口,其中4个PWM输出口通过电子调速器和4个无刷直流马达相连,另外4个PWM输出口通过舵机控制模块和4个圆周舵机相连,通过控制PWM输出口输出电平的高低来控制各个电机的转速与转向,由此实现机器人的行走、飞行、变速和姿态调整等功能。同时,主控板通过串口与信息采集模块相连,可以实现对信息采集模块的控制以及对采集信息的处理。
2.3.2 控制系统软件设计
主程序流程,如图5所示。首先接收机等待指令输入,一旦有运动指令输入,判断该指令是飞行还是行走,然后调用相应指令的子程序,完成相应的运动。
若收到飞行指令,则调用飞行子程序,接收机继续等待,一旦有信息采集指令输入,判断该指令是否是空中信息采集命令,若是则调用悬停子程序,停稳后调用空中信息采集子程序进行信息采集,采集完后接收机继续等待若收到返航指令则调用返航子程序执行返航,否则继续飞行。

图 4 控制系统结构框图
若收到行走指令,则调用行走子程序,接收机继续等待,一旦有信息采集指令输入,判断该指令是否是地面信息采集指令,若是则调用地面信息采集子程序进行信息采集,采集完后接收机继续等待若收到返回指令则调用返回子程序执行返回,否则继续行走。

图5 主程序流程图
2.4 信息采集系统设计
机器人的信息采集系统由农业信息采集模块和飞行姿态检测模块组成。其中,农业信息采集模块主要包括DHT温湿度传感器,FPV摄像头;飞行姿态检测模块主要包括三轴加速度计、三轴陀螺仪、三轴罗盘和高精度气压计。各传感器的参数如表2所示。

表2 传感器参数表
主控板通过这些传感器可以实时获取当前的农业信息和飞行姿态信息,收集的农业信息可以为接下来的农业生产提供参考;收集的飞行姿态信息可以使机器人及时调整飞行速度以及姿态,从而使机器人在复杂的农田环境中可以高效的工作。
3 温、湿度检测试验
一天中,在同一温室大棚内进行样机温湿度检测试验。首先,在大棚内均匀的选取十个测量点并架设温湿度传感器,在固定的时间点回收采集的数据,并求得它们的平均值作为当前大棚的温、湿度参考值。用样机在同一时间同一点在大棚中进行温、湿度检测,得到实时数据,采集数据如表5所示。
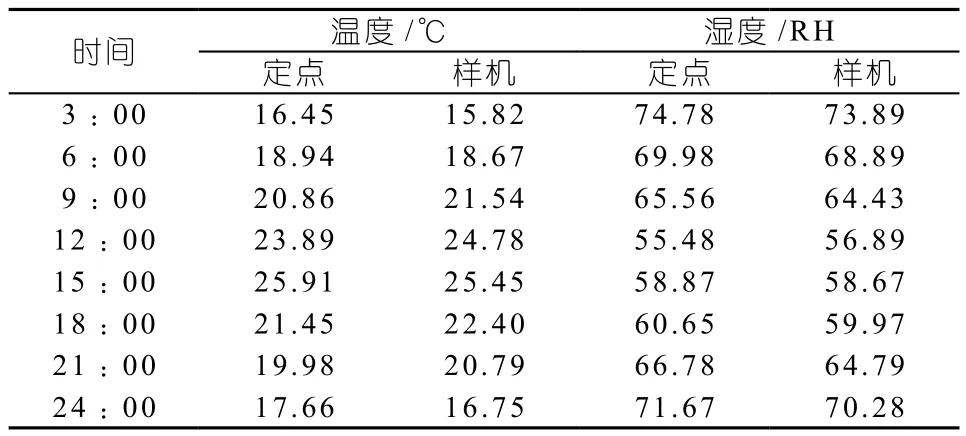
表5 温湿度采集数据表
通过比较两组数据可以看出样机测得的数据与参考值吻合,由此说明样机可以准确地检测出大棚里的实时温湿度,可以为后续的农业生产提供可靠的依据。
4 结论
根据机器人的设计要求,设计了地空两用农业信息采集机器人的软硬件系统。机器人可以全方位、实时地采集农田中的信息,为后续的精细化农业生产提供了更加可靠的依据。
[1] Bak T,Jakobsen H. Agricultural robotic platform with four wheel steering for weed detection[J]. Biosystems Engineering,1987(2):125~136.
[2] MichihisaIida, Donghyeon K,Mitsuru T,et al. Localization of CO2source by a hexapod robot equipped with an anemoscope and a gas sensor[J].Computers and Electronics in Agriculture.2008(63):73~80.
[3] Y Nagasaka,Q Zhang,T. E. Grift,et al. Control System Design for an Autonomous Field Watching-dog Robot[C].Technology for Off-Road Equipment, Proceedings of the 7-8 October 2004 Conference,Kyoto,Japan.
[4] Grift T E. Robotics in Crop Production[J]. Encyclopedia of Agricultural, Food and Biological Engineering, doi:10.1081/E-EAFE-120043046.
[5] Grift T, Zhang Q. Kondo, N,et al. A review of automation and robotics for the bioindustry. Journal of Biomechatronics Engineering,v.1, n.1,p.37~54, 2008.
[6] 胡娜,陈勇,王红星.农田信息采集机器人机构设计与奇异性分析[J].机器人,2010;32(3):363~368.
[7] 陈曙光,周小波,等.无人机农田信息采集装置:中国,201520095820.3[P]. 2015-08-12.
[8] 纪超,冯青春,袁挺.温室黄瓜采摘机器人系统研制及性能分析[J].机器人,2011,33(6):727~730.
[9] 李志伟,潘剑君,张佳宝.基于无线数传技术的智能农机载高光谱采集系统的研究[J].光谱学与光谱分析. 2006,26(10):1813~1816.
[10] 冯晓霞,安秋,姬长英.农用机器人DGPS导航方法及数据采集 [J]. 江西农业学报,2007,19(9):120~122.
[11] 罗锡文,区颖刚,赵祚喜,等.农用智能移动作业平台模型的研制 [J].农业工程学报,2005, 21(2):83~85.
[12] 朱洪波,杨龙祥,朱琦.物联网技术进展与应用[J].南京邮电大学学报,2011,31(1):1~9.
[13] 李继宇,张铁民,彭孝东,等.小型无人机在农田信息监测系统中的应用[J]. 农机化研究.2010(05):183~186.
[14] 白由路,金继运,杨俐苹,等.低空遥感技术及其在精准农业中的应用[J].土壤肥料,2004(01):3~6.
猜你喜欢
水上消防(2022年1期)2022-11-20
青少年科技博览(中学版)(2022年6期)2022-08-31
基层中医药(2020年9期)2020-11-27
商品与质量(2019年34期)2019-11-29
今日农业(2019年12期)2019-08-15
计算机系统应用(2019年3期)2019-03-11
中国科技纵横(2015年2期)2015-11-05
科学中国人(2014年16期)2014-11-20
中国新技术新产品(2014年3期)2014-03-24
中国信息化·学术版(2013年1期)2013-05-28
