
磁航向误差对空投惯性导航系统传递对准精度的影响
2018-02-28 11:25陈红高贤娟沈宇章文娟
电子技术与软件工程 2018年13期
陈红 高贤娟 沈宇 章文娟


摘要 利用车载试验结果证明不同大小的磁航向误差对空投惯性导航系统动基座传递对准精度的影响效果。介绍空投系统的应用环境和系统组成;设计具体试验惯性导航系统的传递对准方案;分析磁航向初始值在系统传递对准中的作用;通过跑车试验来验证磁航向误差对空投系统动基座传递对准精度的具体影响。
【关键词】磁航向误差 空投系统 动基座 传递对准
空投是将物品利用降落伞投放到指定目的地,无论在现代战争还是救援过程中都发挥着极其重要的作用。传统的空投方式精确度容易受到天气、风速等环境因素影响,造成投送位置不准确,极大地影响投放物资的使用。现在根据精度和安全性的要求,在空投系统上都会安装导航系统以确保物品能顺利到达指定目的地,导航系统的精度会直接影响投送物品的准确性。
本论文主要通过实验证明磁航向误差对空投惯性导航系统动基座传递对准精度的影响,为后续空投试验提供具体的数据支持。
1 空投系统的应用和组成
传统的空投方式依靠低空飞行来提高空投精确度。但是低空飞行在军事领域的应用中有极大的弊端,那就是极易被敌方察觉并摧毁。为了提高空投系统的环境适应高度,新的空投系统都会结合制导及控制技术,在空投系统上装备导航系统,以成为高精度的空投系统。
高精度的空投系统一般主要由地面控制系统、导航系统及空中投放控制系统等组成。地面控制系统通过操控来控制投放系统的方向、高度和速度,确保投放精准度。导航系统将空投系统的位置和姿态信息提供给地面控制系统,空中投放控制系统控制整个空投系统的速度和方向。
在空投系统上装备导航系统时,有以下几种选择:GPS全球定位导航系统,惯性导航系统,组合导航系统,北斗系统等。惯性导航系统的隐蔽性好,但是精度随着时间的增加而呈指数型累计;GPS导航定位系统具有全球性和高精度的特点,但是易受遮挡,且军事应用中不具有可靠性。所以,可在空投系统中采用GPS/INS组合导航系统。
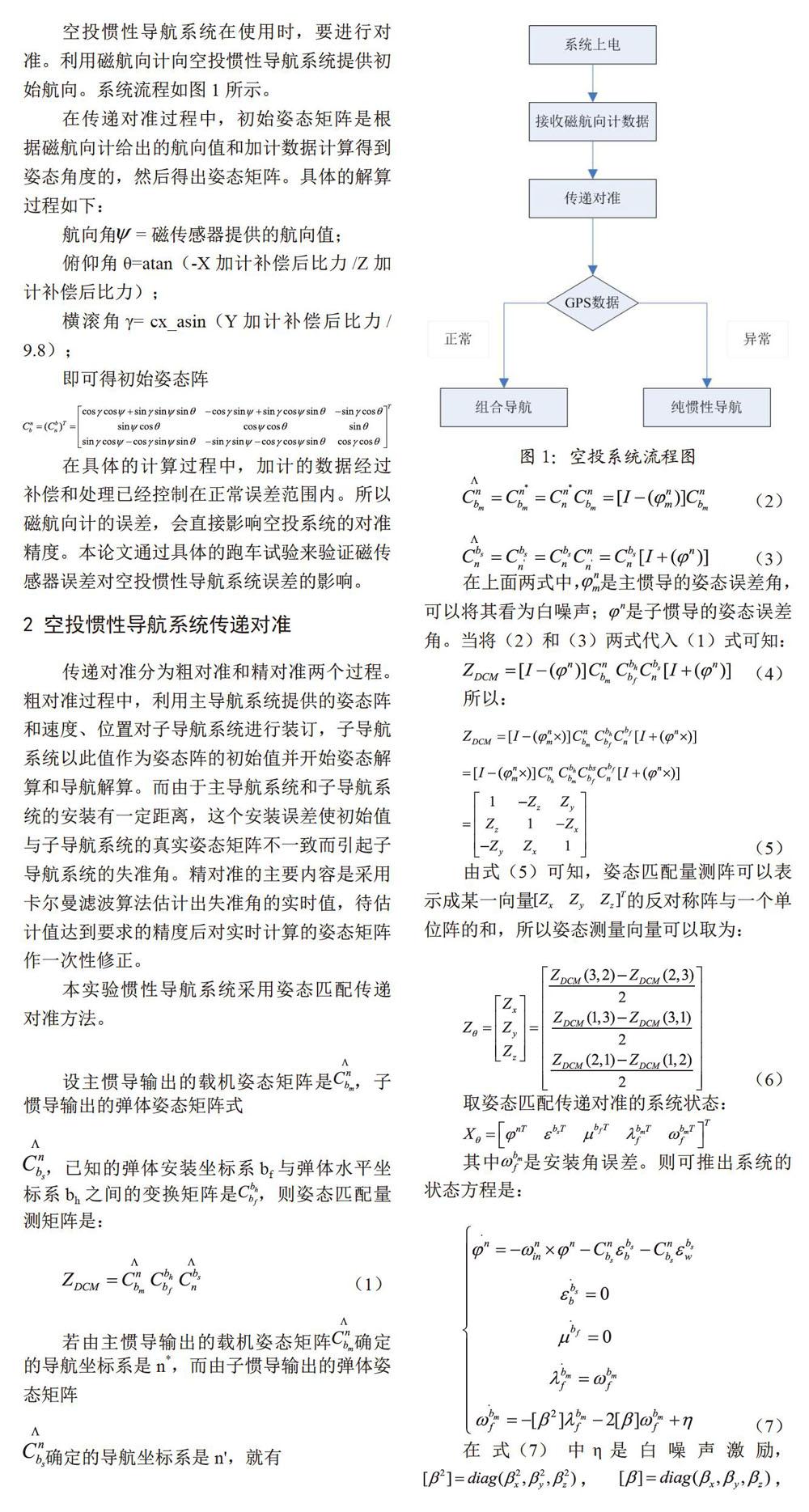
空投惯性导航系统在使用时,要进行对准。利用磁航向计向空投惯性导航系统提供初始航向。系统流程如图1所示。
在传递对准过程中,初始姿态矩阵是根据磁航向计给出的航向值和加计数据计算得到姿态角度的,然后得出姿态矩阵。具体的解算过程如下:
航向角ψ=磁传感器提供的航向值;
俯仰角θ=atan(-x加计补偿后比力亿加计补偿后比力);
横滚角γ= cx_asm(Y加计补偿后比力/9.8):
即可得初始姿态阵
在具体的计算过程中,加计的数据经过补偿和处理已经控制在正常误差范围内。所以磁航向计的误差,会直接影响空投系统的对准精度。本论文通过具体的跑车试验来验证磁传感器误差对空投惯性导航系统误差的影响。
2 空投惯性导航系统传递对准
传递对准分为粗对准和精对准两个过程。粗对准过程中,利用主导航系统提供的姿态阵和速度、位置对子导航系统进行装订,子导航系统以此值作为姿态阵的初始值并开始姿态解算和导航解算。而由于主导航系统和子导航系统的安装有一定距离,这个安装误差使初始值与子导航系统的真实姿态矩阵不一致而引起子导航系统的失准角。精对准的主要内容是采用卡尔曼滤波算法估计出失准角的实时值,待估计值达到要求的精度后对实时计算的姿态矩阵作一次性修正。
本实验惯性导航系统采用姿态匹配传递对准方法。
3 车载试验方法与结果
利用上述方法设计传递对准方案后,利用跑车试验验证初始磁传感器误差大小对空投惯性导航系统传递对准精度影响。
空投系统在投递之初,惯性导航系统跟随物品做降落及旋转运动。所以,利用跑车转圈运动模拟旋转运动。在具体的转圈试验过程中,将GPS的数值设为定值,避免在误差中引入GPS因环境因素造成的误差。跑车试验时给系统上电后,利用软件来设定不同大小的磁航向计误差。具体的试验数据如表1所示。在具体的试验过程中,设定大的误差值可提供试验数据,模拟出惯性导航系统的误差曲线,为后续的研究和试验提供数据支持。
在图2中,横坐标代表初始航向误差(度),纵坐标代表距离误差(米)。每点对应不同大小的初始航行误差对空投惯性导航系统传递对准精度的影响结果。
4 总结
本文利用跑车试验验证不同初始磁传感器误差对空投系统动基座传递对准精度的具体影响。发现航向误差大小影响效果具有对称性质,即X度和( 360-X)度的影响效果近似。在0-180度初始误差范围内,距离误差L=-0.003*δψo+3.78*δψo+31.85,为后续试验提供数据支持。
参考文献
[1]秦永元,惯性导航[M],西安:西北工业大学出版社,2006.
[2]陈雷,卞鸿巍,王荣颖,苏瑞祥,三轴磁传感器误差分析与校准[J].舰船电子工程,2017( 01).
[3]孙有田,张纯学,孙宏超,磁传感器在动态平台上的应用[J].飞航导弹,2007 (07).
[4]富立,刘文丽,无人机捷联航姿系统磁航向误差分析[J].中国惯性技术学报,2007 (06).
[5]李良君,傳递对准误差补偿及精度评估方法研究[D].哈尔滨:哈尔滨工程大学自动化学院,2008.
