
矿用智能型带速传感器的设计
2018-02-28 11:25张聚
电子技术与软件工程 2018年13期
张聚


摘要 分析了常用带速传感器的工作原理和优缺点,采用光电传感技术设计了一种智能型带速传感器,设计了CAN总线通信电路,设计了光电传感器和霍尔元件的安装方法。智能型带速传感器具有CAN总线接口,可以接入转速信号和带式输送机的运行信号,在无需人工设定参数的情况下,智能型带速传感器不仅可以判断打滑和超速,并可以结合带式输送机的运行状态对带速的异常情况进行预警。
【关键词】带速 传感器 CAN 光电 智能
采用带式输送机运煤是现代煤矿重要的运输方式。在带式输送机运行过程中,如果由于某种原因,带速与滚筒转速不一致,则胶带与滚筒会产生摩擦,导致胶带和滚筒温度升高,甚至着火,也就是通常说的“打滑”现象,这会严重威胁煤矿生产的安全。如果是下运带式输送机,当负荷过大,电动机的制动力矩不足以控制带速时,带速和滚筒转速会迅速升高,超过正常运行速度,即通常說的“超速”现象,同样会对煤矿安全产生威胁。《煤矿安全规程》规定带式输送机必须设置打滑保护,下运带式输送机还必须设置超速保护,因此,带式输送机带速检测传感器是保证带式输送机安全运行的重要组成部分。本文分析了常用带速传感器的工作原理和优缺点.采用光电传感技术设计了一种智能型带速传感器,具有CAN总线接口,可以接入转速信号,智能判断打滑和超速,同时可以接入带式输送机的运行信号,当带式输送机正在运行并且带速和转速短时间内变化过大时进行报警。
1 常用带速传感器
通常是将带速通过机械装置转换为转速进行测量。转速的检测通常有以下几种方法。
1.1 电流式传感器
电流式传感器的基本原理是输出电流会随传感头与金属的距离在一定范围内变化。因此需要将带速通过机械装置转换为齿盘的转速,当齿盘转动时,齿和空隙变换地对准传感头,使输出电流产生由小到大和由大到小的变化。德国的NAMUR信号标准就是一种电流式传感器标准。NAMUR是“德国测量与控制标准委员会”制定的一项标准,是P+F提出的。以NAMUR标准为例来说明电流式传感器原理。
NAMUR传感器根据金属物接近传感器的距离,会产生一个1.2mA到2.lmA电流信号,标定的开关电流典型值为1.5 5mA,这样它可以来检查金属物是否接近。对于信号处理来讲,当电流由低到高越过1.75mA时,产生一个输出信号变化(从O到l,或从OFF到ON),当电流由高到低低于1.55mA时,产生一个输出信号变化(从1到0,或从ON到OFF)。这样就把电流信号转换成了脉冲信号,方便后级电路的处理。
NAMUR型速度传感器是一种仅仅包含一个振荡器的二线制传感器,其内阻会随着感应目标的远近而发生变化,相应地其电流也随之变化。该传感器输出的信号是小电流信号,需要采用一系列放大调理电路才能转换为单片机可以识别的脉冲信号,因此其信号处理电路相对复杂。
1.2 干簧管式传感器
干簧管式传感器的工作原理如图1所示。干簧管中有两个磁簧片,当有磁铁靠近时,磁簧片被磁化,吸合在一起,接点导通,当磁铁远离时,磁场消失,磁簧片自身的弹性力使其恢复原位,接点断开。干簧管式带速检测传感器就是利用磁簧片的这一特点,在转盘上安装永久磁铁,随着转盘的旋转,磁铁会周期性地靠近远离干簧管,接点会周期性地导通断开,信号处理电路可以采集接点通断的频率,最终转化为速度信号。转盘是的随胶带转动的部件,可以将胶带的带速转换成转速。
干簧管式带速检测传感器原理简单,输出的接点信号易于单片机的处理,但由于磁簧片频繁机械动作,长时间运行容易出现接触不可靠的情况。
1.3 光电式传感器
光电式传感器原理与干簧管式类似,区别在于用光电传感器代替了干簧管,光电传感器是电子器件,在运行过程中不存在机械动作,信号稳定,使用寿命长。
2 智能带速传感器的特点
传统带速传感器从功能上可以分为两类:
(1)仅检测带式输送机带速,将其转化为模拟量信号或者总线信号传给上位机;
(2)除检测带式输送机带速外,本身具有逻辑判断功能,人工给传感器设定上下阈值,由传感器给出打滑或超速信号。
第1类仅仅是检测部件,不具有智能性,第2类虽具有逻辑判断功能,但需要人工根据每条带式输送机的参数进行设定,不易于操作,并且在带式输送机起动阶段,由于刚开始带速低,容易出现误报警,需要上位机程序中进行屏蔽,这导致无法检测起动阶段的打滑问题。
为了方便操作,并且可以准确检测带式输送机的打滑和超速,智能带速传感器必须同时检测带速和驱动滚筒转速,并进行综合信号处理。带速值和转速值按照一定的换算关系转换成相同的单位,然后进行比较,当带速值小于转速值时认定为打滑,当带速值大于转速值时认定为超速,同时通过现场总线采集带式输送机的运行信号,当带式输送机正在运行并且带速和转速短时间内变化过大时进行报警。智能带速传感器在现场施工时不需要人工设定任何参数,操作方便,检测更可靠。
本文设计的智能带速传感器具有CAN总线接口,可以采集挂接在总线上的滚筒转速传感器和带式输送机动力装置的数值,本身具有逻辑处理功能,对采集到的数据进行实时处理,将处理结果通过CAN总线传输给上位机,CAN总线采用多主通信方式,通信灵活,实时性好,有利于保护带式输送机的安全运行。
3 智能带速传感器的设计要点、
3.1 CAN总线设计
智能带速传感器需要采集带速、驱动滚筒转速和带式输送机运行状态,采集点分布于带式输送机的不同位置,相互之间采用CAN总线进行通信,因此传感器必须具有CAN总线接口。
智能带速传感器、滚筒转速传感器的CAN通信部分的原理是相同的。作为一个CAN总线节点,需要有CAN控制器和CAN收发器,CAN控制器实现CAN总线协议,CAN收发器实现CAN总线的电平转换。某些单片机内部集成了CAN控制器,选用此类器件,可以简化设计。本文选用NXP公司的LPC11C14单片机,其内部集成了CAN控制器,外部只需连接一个CAN收发器,即可实现一个CAN总线节点。由于带式输送机控制系统的传输距离可能比较长,因此需要选择一款适合于长距离传输的CAN收发器,本文选用AMIS42675,此芯片可以更好地支持CAN总线的低速率、长距离传输。CAN总线通信的原理图如图2所示。
3.2 光电传感器信号采集
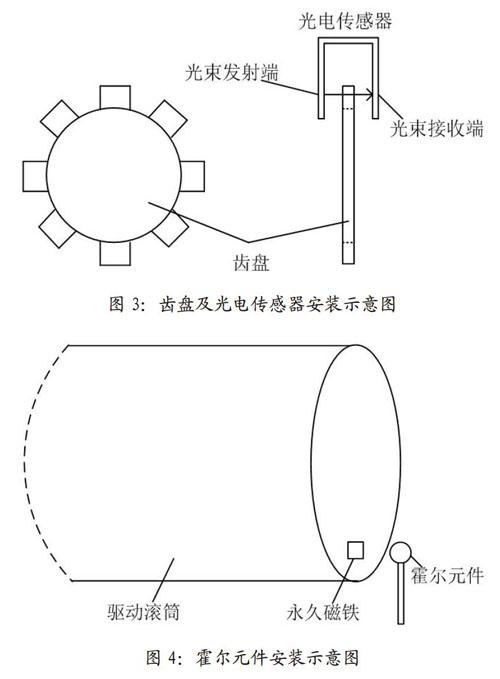
光电传感器是利用被测物体对光束的遮挡或反射,把被测物理量的变化转变为光信号,然后借助光电元件进一步转换为电信号。智能带速检测传感器设计有转动轮,转动轮与胶带紧密接触,当胶带运转时,在摩擦力的作用下,转动轮跟随转动。与转动轮同轴装有一个齿盘,光电传感器横跨在齿盘边沿,齿盘转动时光电传感器的光束交替地穿过和遮挡,使得光电传感器输出一定频率的脉冲信号,如图3所示。
齿盘上齿数影响带速传感器的响应速度,齿数少,当带速有变化时,光电传感器输出的脉冲信号的频率变化不明显,并且单片机为了防止数据错误,会进行一定时间的滤波,导致上位机检测到速度变化滞后。因此,对于响应速度要求高的应用场所,齿盘上齿数应设计的多一些。
3.3 霍尔元件信号采集
霍尔元件用来检测驱动滚筒的转速,在滚筒侧面固定一块永久磁铁,霍尔元件固定在与永久磁铁等半径的一个位置,并与永久磁铁保持一定的水平距离,既保证霍尔元件与永久磁铁不会碰撞,又保证永久磁铁在霍尔元件的感应范围内。霍尔元件的安装方式如图4所示。霍尔元件采用单极性霍尔开关,磁场靠近时,输出低电位电压(低电平)或关的信号,磁场远离时输出高电位电压(高电平)或开的信号,单片机采集高低电平信号的频率,即可转换出滚筒的转速。
4 结语
分析了常用带速传感器的工作原理和优缺点,采用光电传感技术设计了一种智能型带速传感器,具有CAN总线接口,可以接入转速信号和带式输送机的运行信号,智能判断打滑和超速。设计了CAN总线通信电路,设计了光电传感器和霍尔元件的安装方法。在无需人工设定参数的情况下,智能型带速传感器不仅可以判断打滑和超速,并可以结合带式输送机的运行状态对带速的异常情况进行预警。智能型带速传感器对于保障煤矿带式输送机的安全稳定运行具有现实意义。
参考文献
[1]马宏伟,毛清华,张旭辉,矿用强力带式输送机智能监控技术研究进展[J].振动、测试与诊断,2016,36 (02): 213-219.
[2]盛涛,于岩,于卉等.带式输送机带速检测系统的设计应用[J].煤矿机械,2009, 30 (06):133-134.
[3]孔维社.主运煤流线协同控制系统的故障诊断设计[J].工矿自动化,2017,43(09):32-36.
[4]张守福,刘洪超.NAMUR,型速度传感器信号采集电路的设计[J],工矿自動化,2011 (08):113-115.
猜你喜欢
纺织科学研究(2021年1期)2021-12-03
电子制作(2019年22期)2020-01-14
传媒评论(2019年5期)2019-08-30
时代英语·高一(2019年1期)2019-03-13
