基于雪天的车流量检测算法
2018-02-28 09:38于洋黄新
电子技术与软件工程 2018年23期
关键词:雪花
于洋 黄新


摘要
目前传统的车流量检测方法容易受到恶劣天气等外界因素的影响,造成了误检率较高、实时性较差等问题,因此精确地检测出雪天下的汽车流量对于城市的智能交通具有重要的意义。本文首先采用的是改进的帧间差分法降低雪花对车流量检测的影响,然后以车辆的背景信息作为检测特征,利用改进的背景帧差和相部帧差法降低车辆区域内的空洞对车辆检测造成的影响,保证车辆区域的完整性。最后统计驶入虚拟区域的车辆数目进行车辆计数,从而得到车流量信息,实现视频中该路段的车流量计算。经过大量实验表明本文提出的车流量算法提高了检测的准确性和实时性要求。
【关键词】背景帧差 恶劣天气 雪花 车流量统计
1 总体设计
首先读入在雪天采集的车辆视频图像,下一步根据车道宽度在图像的适当位置设置大小合理的虚拟线圈,然后去除图中的雪花,有利于图像质量的提高。再对图像进行增强处理,使经过处理后的图像更便于后续处理,接下来对背景进行更新,再利用本文中提出的改进的背景帧差和相邻帧差法对运动车辆进行检测,最后通过识别车辆是否进入虚拟线圈来统计车流量。总体设计流程图如图1所示。
2 获取视频图像
本文所使用的视频文件是雪天在人行天桥上拍摄的,每秒50帧,每帧图像的大小为640×480。在保证实验计算结果不受影响的前提下,还要充分考虑处理图像实时性的需求,对拍摄的视频图像采用每隔三帧抽取的方式,即每秒15帧。
3 雪花的检测与去除
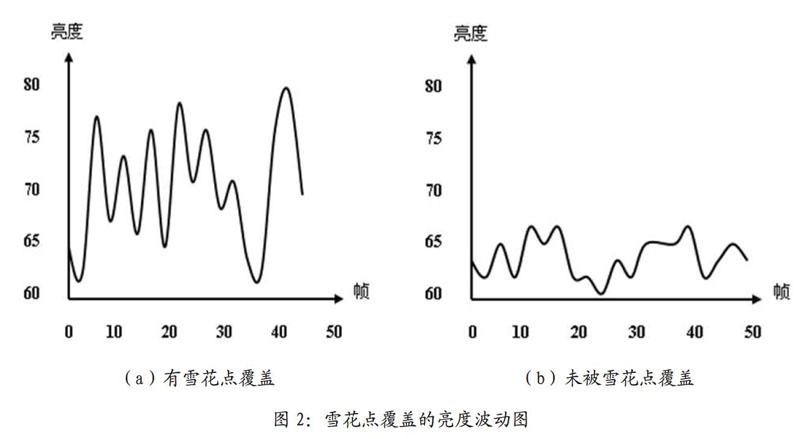
通过分析运动图像中雪花点的相关特性,提出了有效检测与去除视频中雪花点的算法。一种是运用改进的K-means算法,该算法依据图像的像素点亮度变化,对图像中像素点的亮度变化统计结果进行聚类分析,获得雪花点亮度聚类估计值与背景亮度估计值,而背景的亮度值远小于雪花点的亮度值,因此用背景亮度值来代替雪花的亮度值的想法来实现消除雪花的目的。另一种是利用雪花图像的时域特性结合传统帧间差分法,提出一种改进的帧间差分法。本文采用的是改进的帧间差分法。雪花引起的像素点的亮度变化值波动图如图2所示。
从图像亮度波动图中可以看出,被雪花点覆盖部分的像素亮度有较大的波动,而未被雪花点覆盖部分亮度的波动情况较小。说明由于雪花点的遮挡背景的部分光线强度会出现明显的亮度变化,即图像中是否被雪花点覆盖就可依据背景图像亮度的变化来判断。视频图像被划分成不含雪花和包含雪花两个区域再有效地检测出了被雪花遮挡的像素之后,用如下算法需把每帧图像中的雪花去除。首先对第m-2,m-1,m+1m+2这4帧图像中像素亮度按从小到大进行排序,然后把取出亮度较小的两帧,计算这两帧像素亮度的平均值来替代第m帧像素亮度,这样就获得第m帧图像的背景。这样被雪花污染图像中绝大部分可以去除。但是,还是可能出现连续多帧图像中同一个像素被污染的情况,本文采用两张检测出未被雪花污染的相邻像素亮度的平均值来替代这点的像素。经过上述算法对雪天下的车辆视频图像进行去雪花处理,处理后的效果图如图3所示。
4 车流量统计
在十字交叉路口斑马线与停车线之间设定为虚拟的车辆检测区域,该虚拟线圈覆盖所需检测的车道。再在该虚拟线圈中,通过高斯混合模型构建背景模型,基于改进的背景帧差法和改进的相邻帧差法相结合的算法划分车辆区域,通过俯视投影减小车辆区域内的空洞对车辆检测造成的影响,降低错检率,保证车辆区域的完整性。最后,利用设置的阈值与目标区域宽度进行比较来检测车辆,并结合帧数对车流量进行统计。
为了克服传统的背景帧差法差分后的图像易出现断层的缺点,本文提出了在应用背景帧差法检测车辆的同时加入彩色信息,利用色度和灰度信息相融合的方案来解决车辆区域出现断层的难题。该算法需首先将已有背景图像和当前图像的色度和灰度信息提取出来,按色度域和灰度域分别进行背景帧差并阈值化(色度阈值和灰度阈值分别设定为30和40),若像素值小于阈值则设定成黑色像素,若像素值大于阈值则设置成自色像素。再将处理后的色度和灰度图像相应的像素按照或逻辑运算,其结果使车辆二值图像内部的断层会明显地减少。
在十字路口红灯转成绿灯時,车辆往往刚起动车速较慢,相邻两帧的像素比较相差不明显,使用传统的相邻帧差法往往很难获得完整的目标车辆,为后续统计车流量制造困难,因此需要对相邻帧差法实现了改进。检测目标车辆应用隔帧差分法,本文分别对间隔3帧图像、5帧图像、7帧图像差分进行了实验。通过实验结果表明,每隔3-5帧进行一次差分检测得到的车辆比较理想,因此本文采用隔三帧差法对车辆进行检测
假设Mk-1(x,y)和Mk(x,y)分别表示视频图像的第k-2帧和第k帧图像,则差分后图像可以定义为:
根据预先设定的阈值T就能得到二值化的具有运动车辆目标的图像Dk(x,y):
则Dk(x,y)取值为0的像素对应于背景区域,Dk(x,y)取得值为1像素对应于运动目标区域。隔帧差分法的框图如图4所示。
在去除雪花后的视频图像的基础上进行隔帧差分法的对比图如图5所示。其中,(a)图、(b)图、(c)图、(d)图分别对应的是相邻帧差法、隔三帧差法、隔五帧差法、隔七帧差法后的效果图。从图中可以看出,利用隔三帧差法和隔五帧差法的检测结果明显优于利用相邻帧差法和隔七帧差法的检测结果。
通过利用采集到的车辆视频样本对算法进行验证如表1所示,结果表明本文提出的基于机器视觉的雪天情况下的车流量检测算法是有效的。本文提出的算法和方法在运行过程中没有作任何优化处理和硬件加速,最快可每秒处理15帧图像,能够满足实时性处理的需要。
5 结论
本文检测方法与传统的检测方法相比可以适应户外雪景下各种噪声的干扰,消除背景中微小相对移动等一些自然因素对于雪花检测的影响,进而达到很好的车流量检测效果。该算法也可推广用于雨天等其他天气领域,并为智能交通控制系统打下基础。
参考文献
[1]冈萨雷斯.数字图像处理(第三版)[M].北京:电子工业出版社,2008.
[2]Tan K,Oakley J P. Physics based,approach to color image enhancementin poor visibility conditions[J].Journal of the Optical Society ofAmerica A,2001,18(10):2460-2467.
[3]Y.Y Schleicher,S.G Narasimhan and S.KNayar.Instant dehazing of imagesusing polarization.CVPR.2001.
[4]Vittoria B,Domenico V,Zhou Wang.Special issue on human vision andinformation theory[J].Signal,Image and Video Processing.2013,25(no.3):345-367.
猜你喜欢
阅读(低年级)(2019年2期)2019-04-19
阅读(低年级)(2019年12期)2019-02-02
作文周刊·小学一年级版(2017年47期)2018-01-16
小学生导刊(低年级)(2017年2期)2017-06-10
文理导航·科普童话(2017年2期)2017-05-31
学苑创造·A版(2016年12期)2017-01-21
小雪花·成长指南(2009年4期)2009-06-15