
基于BP神经网络PID控制的液位自动控制系统研究
2018-02-27 13:29朱海棠管芳景
电脑知识与技术 2018年35期
朱海棠 管芳景
摘要:在工业生产中,人们常常需要对液位进行检测与调节。该文以双容水箱为对象,通过研究液位自动控制系统的工作过程和动态特性,采用PID控制器。同时,由于神经网络具有决策、规划和学习功能等特点,将BP神经网络和PID相结合,即BP神经网络的输出层与PID控制器中比例、积分和微分系数相对应,可以获得更加良好的控制效果。
关键词:双容水箱;液位;PID控制器;BP神经网络
中图分类号:TP393 文献标识码:A 文章编号:1009-3044(2018)35-0186-02
众所周知,所谓过程控制即根据工业生产过程的特点,采用测量仪表、执行机构和计算机等自动化工具,应用控制理论,设计工业生产过程控制系统,实现工业生产过程的自动化。在工业生产中,人们常常需要对液位进行检测与调节,因此,研究双容水箱具有非常重要的意义。
1 双容水箱的特性研究
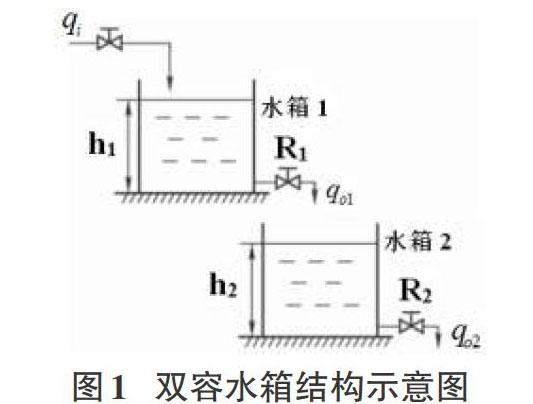
图1为双容水箱结构示意图。如图1所示,两个水箱串联,由于水箱1排出的液体传递给水箱2,所以水箱1将直接影响到水箱2的动态特性。同时,水箱2对水箱1没有任何影响。因此,两个水箱并不是相互影响的关系。
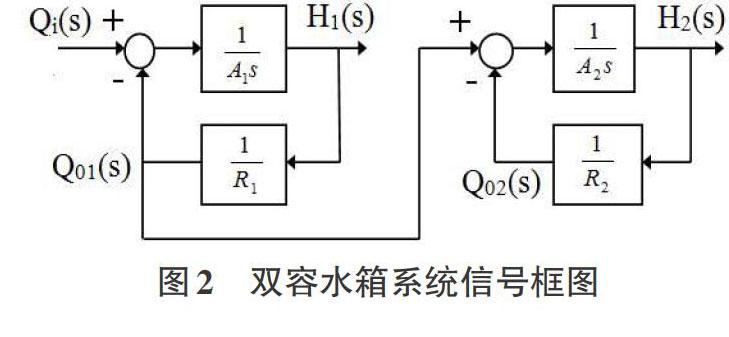
通过分析可知:整个系统的被控对象是水箱2,输入量为水箱1的流量qi,输出量为水箱2的液位高度h2,输出流量qo2是扰动量。在研究过程中,双容水箱可以看作由两个单容水箱串联而成,其系统信号框图如图2所示。根据系统信号框图,可得传递函数为[H2(s)Qi(s)=KT1T2s2+(T1+T2)s+1]。式中,T1是水箱1的时间常数,T2是水箱2的时间常数,K为系统的放大倍数。因此,双容水箱是典型二阶系统,其工作过程比较复杂和多变。
2 PID控制器
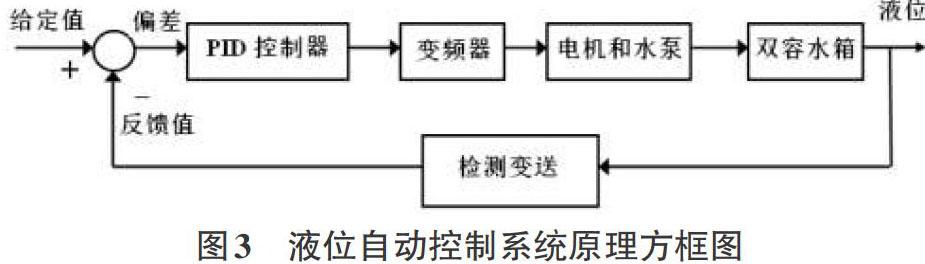
在过程控制系统中,控制器是整个控制系统的核心,作用是将被控变量与给定值进行比较,获得偏差e(t),根据不同规律,产生一个控制信号u(t)可以使偏差减小,以符合系统的控制要求。在工业生产中,常常是各种基本控制规律的不同组合。为了控制水箱液位的高度,通常采用PID控制器。图3为液位自动控制系统方框图。如图3所示,整个系统由自动化装置和生产装置两部分组成,具体包括:PID控制器、变频器、电机和水泵、检测变送器和双容水箱等,其中PID控制器是核心環节。
在液位自动控制系统中,当水箱1的流量qi发生变化时,水箱2的液位高度发生变化,比例控制能迅速地克服干扰的影响,使整个系统较快地稳定下来,但是系统存在着余差。因此,仅仅依靠比例控制,不能满足工艺生产要求。为了保证控制效果,让水箱2液位保持恒定不变,一般在比例控制的基础上引入积分控制。当输入偏差e为零时,经过比例控制,输出变化量Δu为零,即系统仍然位于初始位置上,但是积分控制输出可以处在任何数值的位置上。在整个系统中,积分控制可以消除余差的影响。图4为比例积分控制作用曲线。
如图4所示,当双容水箱受到外界干扰时,经过一段时间调整,可以重新达到原来的平衡状态。同时,由于积分控制的输出变化总是滞后于偏差的变化,控制作用不可能像比例控制那样及时,从而难以对扰动进行及时且有效的抑制。
当液位自动控制系统采用比例积分控制规律后,为了防止水箱2液位的超调量过大,需要减小比例放大倍数,这样将导致系统的整体性能变差。为了避免产生较大的偏差,同时缩短系统控制时间,需要引入微分环节。将三种控制方式组合在一起,构成比例积分微分(PID)控制。根据双容水箱的特性,合理选择3个参数,即比例度[δ]、积分时间TI和微分时间TD,才能获得较好的控制效果。
3 神经网络与PID控制结合
随着生产、生活中的控制系统越来越复杂,人们对控制的要求也越来越高,传统的控制器已经不能满足实际需要,神经网络具有决策、规划和学习功能,受到人们的重视。人工神经网络由大量的神经元连接而成,结构简单,但功能强大,能不断学习和做出决策。就结构而言,人工神经网络是由输入层、隐含层和输出层组成,各神经元之间进行信号的传输。其中,输入层主要用来接收外部的各种信号、数据;隐含层可以有若干层,也可以没有,但每一层的神经元只能接收前一层的输出;输出层主要用来把最终结果传递出去。常见的神经网络种类很多,结合工程实际,本文主要采用误差反向传播神经网络,即BP神经网络。BP网络是一种单向传播的多层前向网络,具有自主学习和记忆功能。图5为BP网络结构示意图。如图5所示,BP网络在学习时,分为两部分:正向传播和反向传播。层与层之间的连接是单向的,但信息的传播是双向的。
由于BP神经网络具有自主学习和记忆功能,因此可以找到某一种最佳控制效果下的比例、积分和微分系数。图6为BP神经网络和PID控制结合原理方框图。如图6所示,整个系统控制环节主要由两部分组成。
1) PID控制器:根据液位自动控制系统结构示意图可知,采用PID对系统进行闭环控制,需要调节的参数更加直接,包括比例系数Kp、积分系数Ki和微分系数Kd。
2) BP神经网络:根据系统当前状况,通过调节PID参数,使得系统控制达到最优效果。由于BP神经网络包含输入层、隐含层和输出层,可采用输出层的输出对应Kp、Ki和Kd三个参数,经过自主学习、分析和记忆等,获得最佳控制效果。
将BP神经网络和PID控制相结合,整个系统采用前馈计算和反向误差计算,不断修正算法中使用到的权值,找到合适的学习速率。当权值学习完成后,整个学习过程基本完成。若权值学习未完成,则需要继续进行前馈计算,直至学习过程结束。
综上所述,在液位自动控制系统中,如果仅采用PID控制,那么需要借助工程技术人员的丰富经验,反复实验和论证,否则控制效果一般。同时,由于工业上使用的液位控制系统越来越复杂而又多变,常需要结合神经网络,借助BP神经网络可以解决非线性问题和一些不确定问题等特点,以便获得更加良好的控制效果。
参考文献:
[1] 金林骏,方建安,潘磊宁.单神经元PID模糊控制在水位系统中的建模与仿真[J].电子设计工程,2015,23(13).
[2] 吴恒运,沈乾坤,张维贤.基于神经网络自适应PID控制算法的原水预处理系统[J].热力发电,2018,47(4).
[3] 王鹏,张伟,戴日辉,等.基于PID型神经网络的除氧器压力和水位解耦控制研究[J].热能动力工程,2015,30(6).
[4] 陈小云.单神经元PID控制在锅炉水位控制中的应用研究[J].科技信息,2014(12).
[5] 于志民.基于模糊神经网络的船舶锅炉水位控制优化及仿真模拟[J].天津职业院校联合学报,2017,19(4).
[通联编辑:光文玲]
猜你喜欢
测控技术(2018年9期)2018-11-25
石油化工自动化(2018年5期)2018-11-14
电子测试(2017年11期)2017-12-15
汽车维护与修理(2015年2期)2015-02-28
自动化博览(2014年12期)2014-02-28
科技传播(2012年10期)2012-06-06
