基于风向预测的偏航控制策略研究
2018-02-27 08:40:16路宏田德庞辉庆吴志学王若愚
风能 2018年12期
文 | 路宏,田德,庞辉庆,吴志学,王若愚
风能是可再生能源,具有蕴含量大、分布广泛、绿色无污染等诸多优点,其开发利用在世界范围内得到了广泛的重视。偏航系统是风电机组实现快速有效对风,提高风能利用率的重要执行机构,是水平轴风电机组不可或缺的关键部件。由于风的随机性,风电机组根据采集的风向数据执行偏航时会产生偏航滞后、引起偏航误差,进而导致风能利用率降低,并且使机组所受的不对称载荷增加。因此,偏航系统性能直接决定风电机组的经济性和安全性。
为提高风电机组的对风精度,提升风电机组偏航系统的工作效率,提高系统稳定性、可靠性及经济性,研究者们提出了多种偏航控制策略。其中代表性的研究成果有:基于爬山法(HC)的偏航控制策略(其中包含风向标控制与爬山法相结合的基于V-HC算法的偏航控制策略以及结合卡尔曼滤波算法的基于K-HC算法的偏航控制策略)、基于CPSO算法的PIDNN偏航控制策略、基于模糊算法与传统PID控制相结合的偏航控制策略以及基于人工神经内分泌免疫调节的偏航控制策略等。以上偏航控制策略主要根据历史风向控制偏航系统,并未结合风向变化趋势,无法保证机组偏航结束后的对风精度。随着预测算法的逐步完善,有研究者结合风向预测提出了基于BP神经网络风向预测的偏航控制策略、基于时间序列预测与卡尔曼滤波结合的风向预测的偏航控制策略,以及基于聚类算法和风向预测的偏航控制优化策略。这些基于风向预测的偏航控制策略以预测风向代替实际风向作为偏航系统的输入,虽然提高了对风精度,但会增加偏航系统重启次数。
基于此,本文提出一种基于时间序列模型预测的偏航控制策略。为避免偏航控制系统频繁重启,该策略仍采用传统的偏航启动策略,并且根据预测的平均风向执行偏航系统控制。仿真结果表明该偏航控制策略可在减少机组偏航动作次数的同时,提高对风精度。
偏航系统工作原理
偏航系统是一种对风装置,一般由偏航驱动装置、偏航传动装置、偏航计数器、偏航制动器、风速风向仪、偏航轴承、扭缆保护装置等组成。
风电机组通过风向风速仪检测风信号,将测得的信号传输到偏航控制器进行数据处理,控制器经过比较判断后发送偏航命令至偏航执行机构,从而调整机舱位置实现对风。完成对风动作后,偏航电机停止工作,偏航制动器锁紧,偏航结束。偏航工作原理流程如图1所示。

图1 偏航系统工作原理

图2 传统偏航控制原理
大型风电机组的偏航控制主要根据传感器采集的风向信号和已设定的控制逻辑进行偏航。当检测到过去一段时间内平均风向与当前机舱位置角的差值超过设定角度时,机组开始执行自动偏航实现精准对风。在传统偏航控制策略下,机组重启偏航的次数与采集平均风向时间及偏航容许误差角度有关,提高对风精度会引起机组频繁偏航动作。传统偏航控制流程如图2所示。
其中,θave为上一时刻的平均风向,θp为当前机舱位置,C为偏航容许误差。
风向预测
风向是时刻变化的,具有很强的波动性和不确定性,而偏航系统作为一种基于风向变化的随动系统在对风时存在一定的滞后性,为解决偏航滞后的问题,本文提出了一种基于平均风向预测的偏航控制策略。
预测模型是预测的核心,它的建立主要分为传统统计学方法和人工神经网络法两大类。时间序列分析建模是统计学建立预测模型方法中的一种能建立一个反映该序列随时间变化的模型。由于该模型简单,建模时间短,可根据有限的样本序列建立高精度预测模型,符合风向时刻变化的特性,适用于短期内的风向预测,偏航系统可结合预测风向确定偏航角度实现快速响应。基于此,本文选择一种时间序列分析模型——ARIMA模型作为预测模型。
一、ARIMA模型建模
ARIMA模型又称自回归求和移动平均模型,是由自回归模型(AR)与滑动平均模型(MA)组成。其建模的基本思想是使用差分法对非平稳时间序列进行平稳化处理,通过观察相关函数截尾和拖尾特征自回归阶数p、差分阶数d和移动平均阶数q 三个参数,根据最小AIC准则选取AIC最小值确定p、q值建立ARIMA模型,进而对时间序列进行预测分析。ARIMA模型结构如下:

式中,yt代表t时刻的风向预测值,φi代表第i个自回归系数,θj表示第j个滑动平均系数,ut为独立的误差项。
(一)自相关函数与偏自相关函数
在需要对一个时间序列建模时,应用序列的自相关与偏自相关对序列适合的模型类型进行识别,确定适宜的阶数p、d、q。
1. 样本自相关函数
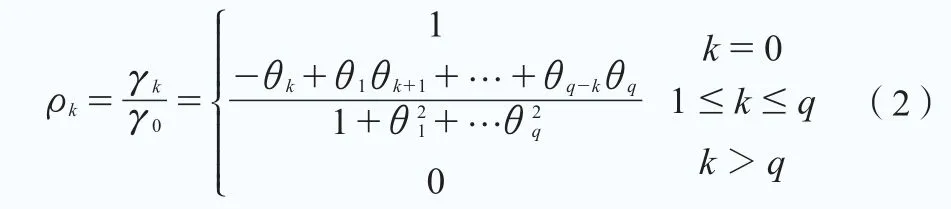
式中,γk是自协方差函数,表达式如下:

式中,σ2=D(ut),是白噪声序列的方差。
2. 样本偏自相关函数
偏自相关是指对于时间序列yt与yt-k之间的条件相关关系,其相关程度由偏自相关系数φkk度量。

式中,γk是滞后k期的自相关系数,

(二)AIC准则定阶
AIC准则定阶是指在(p,q)的一定变化范围内寻求使得AIC(S)最小的点()作为(p,q)的估计。
二、预测实例
选取某风电场2018年5月20日某台机组的1704个风向数据采样点284分钟的风向数据作为研究对象,并选取每4分钟风向平均值共70个作为第一组时间序列建模的平均风向采样点,在Matlab中编写基于时间序列模型预测程序。通过对各采样点序列相关分析,确定差分次数,根据最小AIC准则选取AIC最小值确定p、q值并建立ARIMA模型,最终选取模型ARIMA(1,0,3)为最优模型(如图3)。
由图3可以看出,此预测模型能够准确预测平均风向的变化趋势,误差范围小,精度较高,可将预测的平均风向值作为偏航执行控制参数。

偏航控制系统优化与验证
一、改进偏航控制系统

图3 模型ARIMA(1,0,3)风向预测
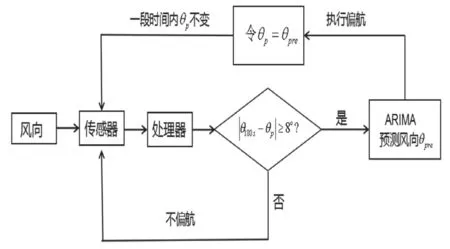
图4 改进偏航控制策略原理
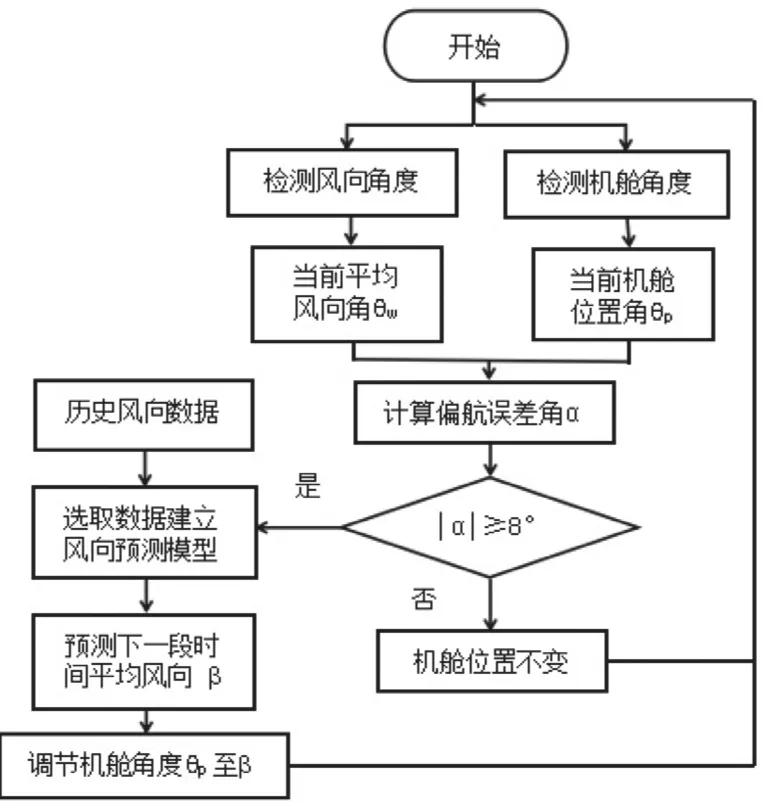
图5 改进偏航系统控制流程

图6 机舱位置对比
传统风电机组偏航控制系统是随动系统,控制器根据风向与机舱位置的误差角调整机舱位置。当风向波动频繁时,机舱位置的调节不仅存在滞后性,还会因频繁偏航造成严重机械磨损。
为解决此类问题,改进偏航控制策略如图4、图5所示。
二、仿真验证及分析
选取某风电场2018年5月20日24小时风向数据作为研究对象,对改进的偏航控制系统进行Matlab仿真验证。改进的偏航控制策略选取时间段0:00-6:45历史风向数据进行建模,在6:45-23:59内根据预测的平均风向执行偏航。对比结果如图6所示。
图6表明,当风向波动较大时,传统偏航策略控制的风电机组偏航系统频繁重启,其原因在于偏航系统不能根据风向变化趋势调节机舱位置导致偏航滞后。而应用改进的新型偏航控制策略后机组偏航重启次数大幅减少,说明其更能满足对风需求。
图7为传统偏航控制和改进的新型偏航控制下的偏航误差对比图,传统偏航控制策略下的偏航误差波动性更强,新型偏航控制策略下的偏航误差整体上小于传统偏航控制策略下的偏航误差,对风精度更高。根据机舱位置与实际风向数据,得出偏航误差频率分布直方图如图8所示。

图7 偏航误差对比

图8 偏航误差频率分布对比
由图8可以看出,两种控制策略下的偏航误差角度主要分布在[-8,8],基本满足偏航对风精度要求,而改进的新型偏航控制策略机组在小范围偏航误差内的概率分布更加集中,说明其对风精度高于传统偏航控制策略下的对风精度。
为进一步分析,下文对均方误差、平均绝对误差、偏航时间及偏航次数进行比较。
均方误差:

平均绝对误差:

传统策略偏航时间:新型策略偏航时间:


式中,N为风向采样数,θp为当前机舱位置,θ180s为执行偏航前180秒平均风向,θpre为执行偏航前预测的风向,θpi为第i时刻的机舱位置,θwi为第i时刻的风向值,vyaw为偏航速度(取值0.5/s)。
由图9和图10可以看出,改进的新型偏航控制的机组与传统机组相比,偏航次数由31次降到21次,偏航次数减少了32%;偏航时间由原来的515秒减少到193秒,偏航时间降低了62%。通过对偏航误差统计,对风精度也有所提高,平均对风误差由原来的8.11降低到7.86,均方误差由10.4降低到10.04。对比结果见表1。
仿真结果表明,传统偏航控制策略基本满足对风要求,但偏航重启次数较为频繁,而改进的新型偏航控制系统可以在更少的偏航次数下满足对风要求,且精度高于传统偏航控制,说明新型偏航控制策略具有更好的控制效果。偏航次数和偏航时间的减少可有效降低偏航过程中的机械磨损,提高机组的可靠性和安全性。
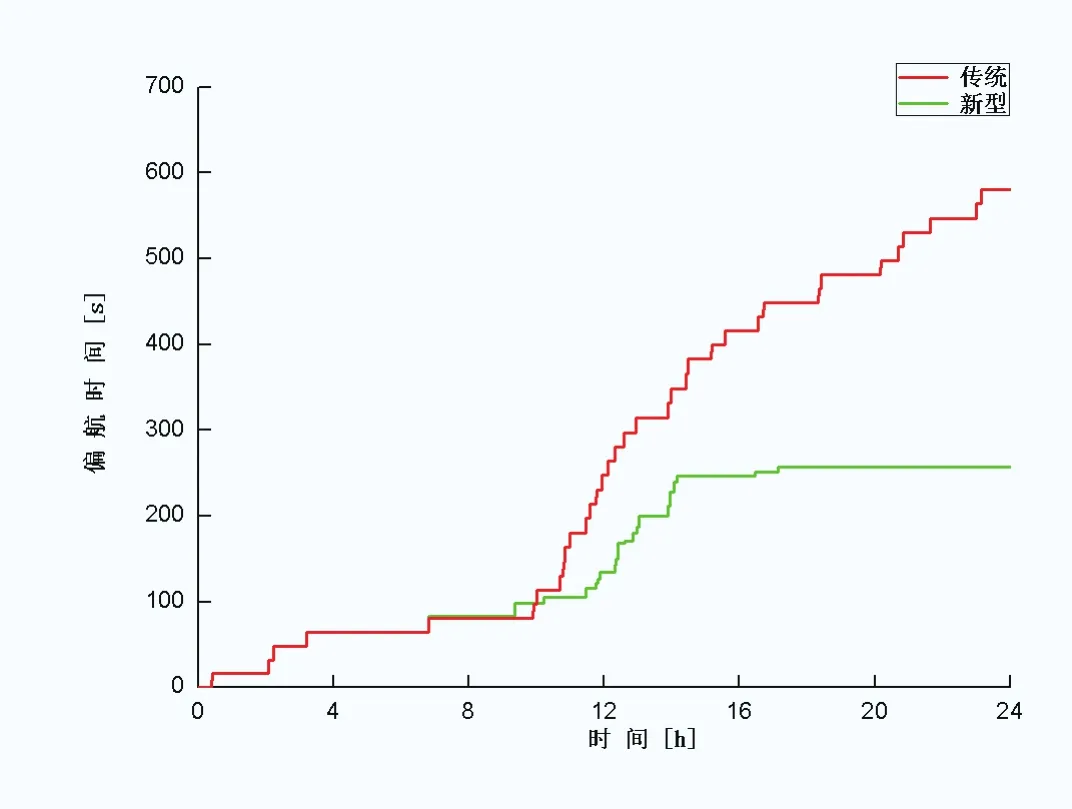
图9 偏航时间对比
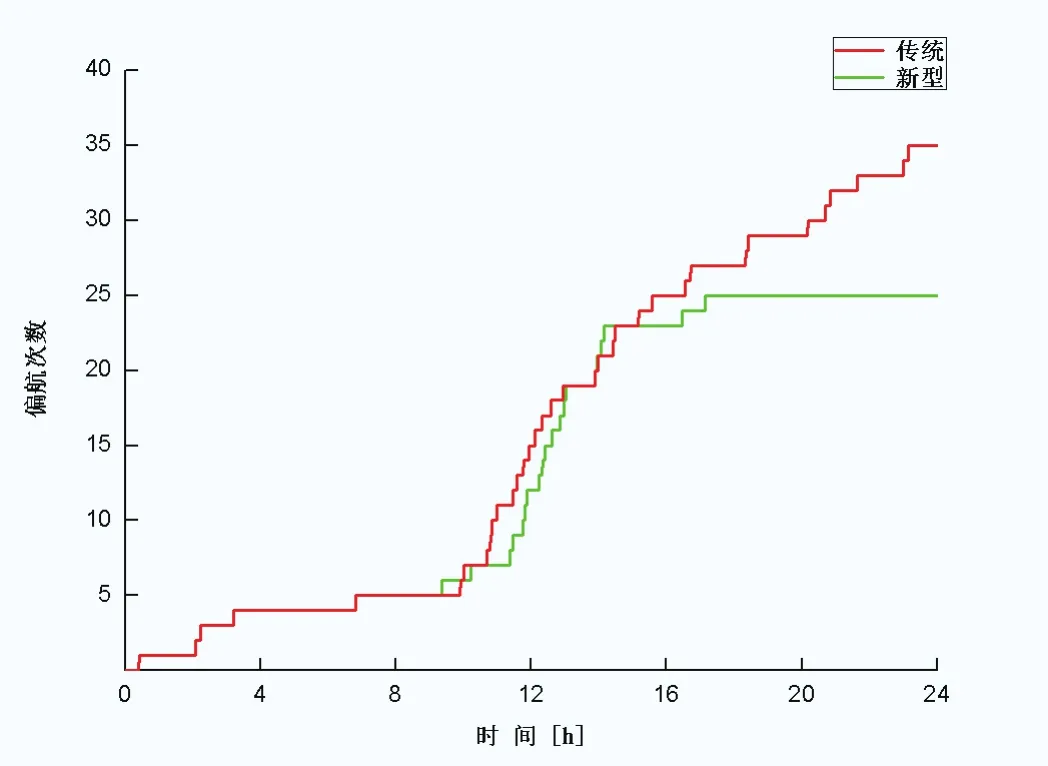
图10 偏航次数对比
结论
在大量的风电机组偏航控制策略研究中,偏航滞后的问题一直没有得到有效解决。在风向变化频繁的情况下,应结合风向变化趋势制定偏航控制策略,从而在提高对风精度的同时降低偏航重启次数。本文提出的基于风向预测的新型偏航控制策略在风电机组偏航重启前根据历史风向数据建立相应的ARIMA预测模型,并根据预测的平均风向进行偏航控制,结合风向变化趋势的偏航控制提高了偏航系统的对风性能。通过仿真验证,ARIMA模型预测的短期平均风向预测精度较高,应用基于ARIMA预测模型偏航控制策略的机组能够更好地满足对风要求,提高对风精度,减少偏航启停次数。

表1 偏航控制策略对比

摄影:马强
猜你喜欢
水上消防(2022年2期)2022-07-22 08:43:56
水上消防(2021年3期)2021-08-21 03:12:20
能源工程(2020年6期)2021-01-26 00:55:22
水上消防(2020年5期)2020-12-14 07:16:20
山东冶金(2019年3期)2019-07-10 00:54:04
消费导刊(2018年10期)2018-08-20 02:57:02
小资CHIC!ELEGANCE(2016年26期)2016-12-13 20:06:51
通信电源技术(2016年1期)2016-04-16 04:57:26
知识经济·中国直销(2016年3期)2016-02-27 16:15:34
船舶标准化工程师(2015年5期)2015-12-03 11:00:29